Wetenschap
Micro-elektronica ingebed in levende kwallen verbetert de voortstuwing
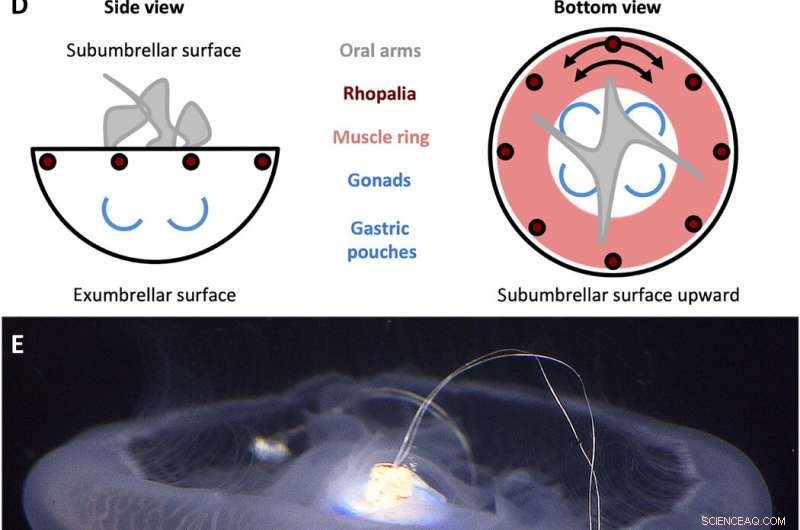
A. aurita zwemcontroller ontwerp. (A) blokgolfsignaal gegenereerd door de zwemcontroller met een amplitude (A) van 3,7 V en een pulsbreedte (T) van 10 ms, ingesteld op frequenties (f) van 0,25, 0,38, 0,50, 0,62, 0,75, 0,88, en 1,00 Hz. (B) Onderdelen van de zwemcontroller. Behuizing omvat (i) een polypropyleen dop met een houten pin die in het midden van de bel past, en (ii) een plastic film om de behuizing waterdicht te maken, beide gecompenseerd met roestvrijstalen en kurkgewichten om het apparaat ongeveer neutraal drijvend te houden. Micro-elektronica omvat (iii) een TinyLily mini-processor, (iv) lithium-polymeerbatterij, en (v) twee platina-tip-elektroden met LED's om stimulatie visueel aan te geven. (C) Volledig geassembleerd apparaat, met de processor en batterij in de behuizing. (D) Vereenvoudigde schema's van de anatomie van A. aurita, het accentueren van de subumbrellaire (boven) en exumbrellaire (onder) oppervlakken, rhopalia, spier ring, en perifere spiervezeloriëntatie, orale armen, en geslachtsklieren/maagzakjes. (E) Zwemcontroller (inactief) ingebed in een vrijzwemmende kwal, bel georiënteerde subumbrellaire kant naar boven, met de houten pin ingebracht in het manubrium en twee elektroden ingebed in het spier- en mesogleale weefsel nabij de belrand. Fotocredits voor (B), (C), en (E):Nicole W. Xu, Stanford universiteit. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaz3194
Onderzoekers in robotmaterialen proberen de voortbeweging van dieren kunstmatig te beheersen om de bestaande uitdagingen voor bediening aan te pakken, controle en stroomvereisten in zachte robotica. In een nieuw rapport in wetenschappelijke vooruitgang , Nicole W. Xu en John O. Dabiri op de afdelingen bio-engineering, civiele en milieutechniek en werktuigbouwkunde aan de Stanford University presenteerde een biohybride robot die micro-elektronica aan boord gebruikte om het zwemmen in levende kwallen te induceren. Ze maten het vermogen om de voortstuwing aanzienlijk te verbeteren door lichaamscontracties met een optimaal frequentiebereik sneller aan te sturen dan natuurlijk gedrag. De manoeuvre verhoogde de zwemsnelheid met bijna drie keer, hoewel met slechts een tweevoudige toename van het metabolische verbruik van het dier en 10 mW externe stroomtoevoer naar de micro-elektronica. De biohybride robot gebruikte 10 tot 1000 keer minder extern vermogen per massa dan bij eerder gerapporteerde aquatische robots. De mogelijkheid kan het prestatiebereik van biohybride robots verbeteren ten opzichte van native prestaties, met mogelijke toepassingen als biohybride oceaanmonitoringrobots.
Kwallen zijn een aantrekkelijk modelorganisme om energiezuinige onderwatervoertuigen te maken vanwege hun lage transportkosten (COT). Bestaande biomimetische robots van zwemmende dieren die volledig zijn gebouwd van technisch materiaal, kunnen snelheden bereiken die vergelijkbaar zijn met natuurlijke dieren, maar met orden van grootte die minder efficiënt zijn dan kwallen. Biohybride kwallenrobots kunnen daarom levende dieren integreren om de bestaande uitdagingen van zachte robotica aan te pakken. Onderzoekers kunnen de kwallenstructuur gebruiken voor activering en het oplossen van stroomvereisten door natuurlijk voedingsgedrag te onderzoeken waarbij ze ter plekke chemische energie uit prooien halen. De aanpak kan ook herstel van schade mogelijk maken via natuurlijke wondgenezingsprocessen die inherent zijn aan het dier, controle van de voortbeweging van dieren en aanvullende studies van de biomechanica van levende organismen mogelijk te maken in door de gebruiker gecontroleerde experimenten. In dit onderzoek, Xu en Dabiri gebruikten een systeem van micro-elektronica om een levende kwal extern te besturen en een biohybride robot te vormen om de wetenschap en techniek van de voortbeweging in het water te bevorderen.
Om kwallen als natuurlijke steiger te activeren, het team gebruikte het eigen basale metabolisme van het dier om de extra krachtbehoefte te verminderen en gebruikte zijn spieren voor activering, terwijl het vertrouwde op zelfgenezende en weefselregeneratieve eigenschappen voor een grotere schadetolerantie. Het team veronderstelde dat het verhogen van de belcontractiefrequenties van kwallen de zwemsnelheid tot een limiet zou kunnen verhogen. Ze controleerden daarom extern de frequentie van pulsen bij vrijzwemmende dieren door de zwemsnelheid en zuurstofopname te meten om de transportkosten (COT) te berekenen en hun werkhypothese te testen. Voorheen waren dergelijke onderzoeken alleen mogelijk via computationele of theoretische modellen.
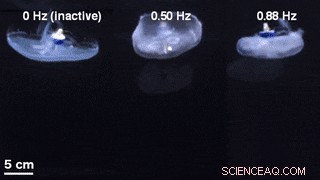
Een vergelijking van belgeometrieën voor niet-gestimuleerd zwemmen met een inactieve zwemcontroller ingebed (links) en extern gecontroleerd zwemmen op 0,50 Hz (midden) en 0,88 Hz (rechts). Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaz3194
Xu et al. geselecteerde Aurelia aurita als modelorganisme; een afgeplatte kwallensoort met een flexibele mesogleale bel en een monolaag van coronale en radiale spieren die het subumbrellaire oppervlak bekleden. Om te kunnen zwemmen, de organismen trokken spieren samen om het volume van de subumbrellaire holte te verkleinen en water uit te stoten om een aandrijfkracht te leveren naast extra bijdragen van passieve energieterugwinning en op zuigkracht gebaseerde voortstuwing. Om deze spiercontracties te starten, de kwal activeerde een van zijn lichte pacemakers in de sensororganen die bekend staan als rhopalia langs de belrand. Deze zenuwclusters activeerden het gehele motorische zenuwnet om bidirectionele spiergolfvoortplanting te veroorzaken die voortkwam uit de geactiveerde pacemakers tijdens natuurlijke voortplanting.
Integratie van robotontwerp in levende kwallen en apparaatvalidatie
De wetenschappers ontwierpen eerst een draagbare, zelfstandige micro-elektronische zwemcontroller om een blokgolf te genereren en spiercontracties van 0,25 Hz tot 1,00 Hz te stimuleren. Ze hebben de controller samengesteld met een TinyLily mini-processor en een 10-mAh lithium-polymeercel. Om het elektrische signaal visueel te bevestigen, Xu et al. verbond de draden in serie met TinyLily light-emitting diodes (LED's). Vervolgens plaatsten ze tweezijdig elektroden in het subumbrellaire weefsel en hielden het systeem natuurlijk drijvend met roestvrijstalen ringen en kurk. Om te valideren dat de zwemcontroller extern de samentrekkingen van de kwallenklok kan controleren, de wetenschappers ontwikkelden een methode om de beweging van de belmarge te volgen. Voor deze, ze voltooiden drie reeksen experimenten, (1) om endogene contracties van het organisme waar te nemen in afwezigheid van verstoringen, (2) om te observeren of het mechanisch inbedden van inactieve elektroden het natuurlijke gedrag van dieren beïnvloedde en (3) om stimulatieprotocollen te testen om extern aangedreven contracties te bevestigen.
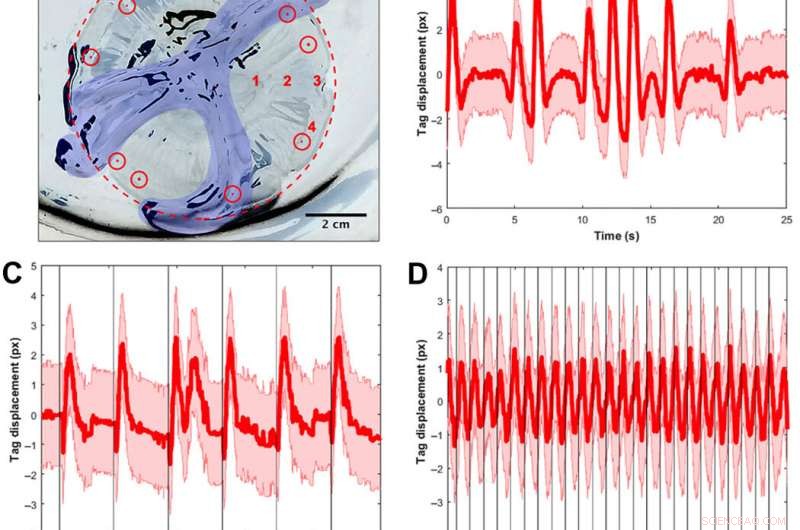
Signaalvalidatie met behulp van visuele tags en frequentiespectra om spiercontracties te volgen. (A) A. aurita medusae (n =10, 8,0 tot 10,0 cm in diameter) werden onder de paraplu geplaatst in een plaat zonder zeewater voor experimenten met beperkte spierstimulatie (elektrode niet getoond). Het beeld is omgekeerd zodat de bel en het bord wit zijn, en zwarte gebieden zijn reflecties van licht van dierlijk weefsel en de plaat. Voor alle duidelijkheid, de rand van de bel is omlijnd in een rode gestippelde cirkel, en de orale armen zijn blauw gekleurd. Zichtbare implantaatelastomeertags (weergegeven als gekleurde rode stippen in rode cirkels) werden rond de rand geïnjecteerd, en één tag werd per video gevolgd om de weefselverplaatsing te berekenen als een surrogaat voor spiercontracties. Ruimtelijke tests om te bepalen of de locatie van de elektrode de spectra beïnvloedde, werden uitgevoerd op vier locaties, gelabeld in rode cijfers:(1) naast de maagzakjes, (2) halverwege tussen de maagzakken en de marge, (3) bij de rhopalia, en (4) aan de rand weg van de rhopalia. Alle andere tests werden uitgevoerd op locatie 2. (B) Voorbeeld tagverplaatsing als functie van de tijd voor een dier zonder enige externe stimulus. De rode lijn geeft de verplaatsing van het zwaartepunt aan, met de fout berekend uitgaande van een onzekerheid van een halve pixel bij het vinden van het zwaartepunt van de tag in elke afbeelding, meer dan 25 s. Let op de temporele variatie van spiercontracties, inclusief perioden van regelmatige pulsen en opeenvolgende snelle pulsen. (C) Voorbeeld tag verplaatsing voor een dier met een externe stimulus van 0,25 Hz, waarbij elke stimulus gevisualiseerd wordt als een verticale zwarte lijn. Hoewel contracties regelmatig externe prikkels volgen, natuurlijke dierlijke pulsen komen ook voor bij lage frequenties. Opmerking, bijvoorbeeld, de dubbele puls na één stimulus (t ≈ 12 s). (D) Voorbeeld tag verplaatsing voor een dier met een externe stimulus van 1,00 Hz, waarbij elke stimulus gevisualiseerd wordt als een verticale zwarte lijn. Hetzelfde tijdvenster (25 s) wordt weergegeven voor een eerlijke vergelijking met de vorige twee plots. Contracties volgen regelmatig externe prikkels. (E) enkelzijdig amplitudespectrum (SSAS's) gemiddeld voor kwallen zonder enige externe stimulus (n =12 voor 10 dieren, d.w.z., 2 kwallen hadden elk twee replicaclips). De rode lijn geeft het gemiddelde aan van genormaliseerde SSAS voor elke replicaat, met de SD in roze. De piek van de gemiddelde SSAS ligt bij 0,16 Hz. De volledige breedte bij half maximum (FWHM) is 0,24 Hz. (F) Kwallenreactie op een inactieve elektrode ingebed (n =14 voor 10 dieren, d.w.z., 4 kwallen hadden elk twee replicaclips). De piek van de gemiddelde SSAS ligt bij 0,18 Hz. De FWHM is 0,16 Hz. Met behulp van een twee-sample t-test van de piekfrequenties voor beide groepen, het verschil tussen de twee steekproeven was statistisch niet significant (P =0,68). (G) Sample SSAS voor een elektrische stimulus bij 1,00 Hz (n =10 kwallen voor een ingangssignaal van 4,2 V en 4,0 ms). De piekfrequentie treedt op bij 1,02 Hz, binnen het 0.02-venster dat wordt gebruikt om de SSAS te berekenen. Merk op dat het spectrum een scherpere piek heeft bij de frequentie van interesse (FWHM van 0,04 Hz), in tegenstelling tot een bredere FWHM in (B) en (C), de gevallen zonder enige externe prikkel. (H) Contourkaart van de frequentierespons van spiercontracties op externe elektrische stimuli. Elke verticale lijn met gegevens (gecentreerd op witte lijnen op 0,25, 0,50, 0,75, 1,00, 1.20, 1.50, en 2,00 Hz) vertegenwoordigt de PSD bij één elektrische ingangsfrequentie, met het aantal geteste kwallen hierboven weergegeven. De kleuren komen overeen met de amplitude van de PSD, waarin hogere waarden in geel worden weergegeven en lagere waarden in blauw. De ononderbroken rode lijn vertegenwoordigt een één-op-één input-outputrespons, en de gestippelde rode lijn vertegenwoordigt de gerapporteerde fysiologische limiet volgens de minimale absolute refractaire periode van de A. aurita-spier (32). Responsieve proeven worden bepaald door of de piekfrequenties in de PSD binnen een venster van 0,06 Hz van de ononderbroken rode curve liggen. (I) Contourkaarten van de niet-reagerende proeven. Hogere frequenties tot 90,00 Hz werden ook getest met vergelijkbare niet-reagerende PSD's. Fotocredit voor (A):Nicole W. Xu, Stanford universiteit. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaz3194
Ze ontdekten dat het natuurlijke gedrag van dieren (of endogene contractie) onregelmatig was met een hoge hartslagvariabiliteit, inclusief een gemiddelde piekfrequentie van 0,16 Hz. Een inactieve elektrode veranderde de frequentiespectra niet significant, terwijl extern aangedreven contracties een fysiologische limiet vertoonden van spiercontracties van kwallen tussen 1,4 Hz en 1,5 Hz. Het team voerde zwemproeven uit met het geïmplanteerde systeem in een zoutwatertank en normaliseerde de gemeten zwemsnelheden om rekening te houden met variatie in diergrootte. Ze hebben de genormaliseerde zwemsnelheid geschaald met het gemiddelde van de genormaliseerde snelheid in afwezigheid van stimulatie (d.w.z. 0 Hz) om de verbeteringsfactor te bepalen. De maximale verbeteringsfactor was tot 2,8 keer de natuurlijke zwemsnelheid van de dieren, d.w.z., de zwemsnelheid is tot 2,8 keer verbeterd met behulp van micro-elektronica aan boord.
Uiterst efficiënt stroomverbruik van het apparaat
De kunstmatig gecontroleerde kwal vereiste externe kracht van het micro-elektronische systeem en interne kracht van de eigen stofwisseling van de dieren. Bij toenemende frequenties, het micro-elektronische systeem van de biohybride robotkwal verbruikte meer watt per kg. Echter, vergeleken met bestaande robots, deze biohybride robot gebruikte tot 1000 keer minder externe stroom. Xu et al. vergeleek dit prototype met de medusoïde en robotstraal gemaakt van rattencardiomyocyten gezaaid op siliconen steigers, en met puur mechanische robots en autonome onderwatervoertuigen (AUV's). Naast de kosteneffectieve voordelen van een laag extern stroomverbruik per massa van de biohybride robot, het micro-elektronische systeem kost slechts minder dan $ 20 van in de handel verkrijgbare componenten. De elektrolocatie was ook niet-specifiek en de dieren herstelden onmiddellijk na de experimenten.
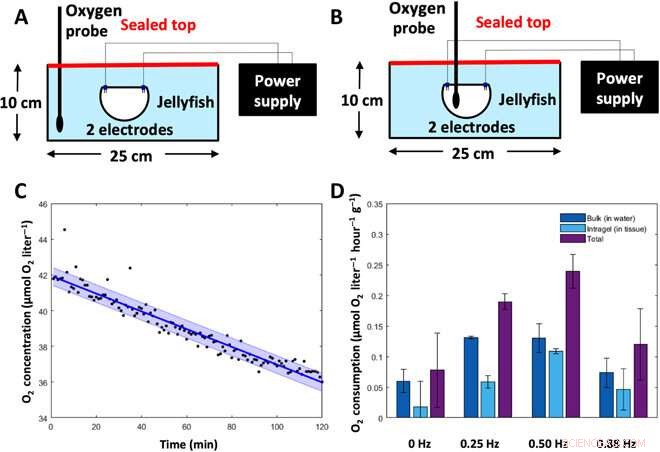
Metabole snelheid experimenten. To determine the metabolic rate of jellyfish, oxygen concentrations were measured in animal tissue and the surrounding water and then converted into energy expenditure. (A) Experimental setup to measure bulk dissolved oxygen concentrations (in the water). Animals were placed subumbrellar surface upward in a sealed glass dish filled with 2 liters of artificial seawater, with two electrodes for frequency-driven cases. Oxygen levels in the water were measured using a MicroOptode oxygen probe. (B) Experimental setup to measure intragel oxygen concentrations (in the tissue). Animals were placed subumbrellar surface upward in a sealed glass dish filled with 2 liters of artificial seawater, with two electrodes for frequency-driven cases. Intragel oxygen levels were measured using a MicroOptode oxygen probe embedded into the tissue. (C) Representative plot of oxygen concentrations over time, measured from the MicroOptode. This example shows measurements of bulk oxygen levels in the water surrounding an animal with a swim controller–driven frequency of 1.00 Hz. Individual data points are shown in black, the best-fit line is shown in dark blue, and the SD is shown in the light blue shaded region. (D) Oxygen consumption rates of the surrounding water (dark blue), within animal tissue (light blue), and total (sum of the water and tissue measurements, purple) were calculated over a 6- to 8-hour period (n =7 animals).Credit:Science Advances, doi:10.1126/sciadv.aaz3194
The new capability of external control allowed Xu et al. to address the relationship between swimming frequency and metabolic rate. Oxygen consumption rates followed a similar pattern to enhanced swimming speeds, and the scientists calculated the equivalent cost of transport using both experimental metabolic rates and experimental swimming speeds. The COT increased at mid-range frequencies and decreased at high external stimulation frequencies. The results showed that enhanced jellyfish swimming did not cause undue cost to the metabolism or health of the animal.
The main robotic limit of the study was the power requirement of the microelectronic system relative to animal versus microelectronic power needs. Further improvement to microelectronics can decrease the energetic costs and extended studies can also strive to minimize endogenous animal contractions without harming the organism to improve controllability of live-animal-based biohybrid robots. The artificial control of jellyfish can expand ocean monitoring techniques with improved controllability by incorporating microelectronic sensors to leverage the existing tagging technology.
© 2020 Wetenschap X Netwerk
 Neutronen verbeteren de lasintegriteit van funderingen van onderwaterwindturbines
Neutronen verbeteren de lasintegriteit van funderingen van onderwaterwindturbines- Typen gietprocessen
- De effecten van zure regen op monumenten
- Nieuwe interactie tussen dunne-filmmagneten voor snellere geheugenapparaten
- Nieuwe ontdekking opent nieuwe weg voor productie met hoge titer van drop-in biobrandstoffen
Hoofdlijnen
- Wat zijn de stappen van de stikstofcyclus?
- De delen van een gistcel
- Een 3D-model van een plantencel bouwen
- Wat doet ADP in de biologie?
- Wat doet de temporale kwab?
- Zelfvernietiging van muggen
- Hoe de cellen van planten, dieren en eencellige organismen te vergelijken
- Zijn dieren nog in ontwikkeling?
- Met uitsterven bedreigde mus in Centraal-Florida die in het wild waarschijnlijk niet zal overleven
- De grenzen van gepersonaliseerde geneeskunde verleggen met high-performance computing

- Boeing onbemande luchttaxi komt van de grond, maar er is geen haast om een ritje te maken

- Autonome voertuigen kunnen een milieuwinst of ramp zijn, afhankelijk van de openbare orde

- Bzigo markeert muggen voor de dood

- Onderzoekers tonen vooruitgang in lithium-metaalbatterijen van de volgende generatie


 Hoeveel Gold Rushes waren er in de 19e eeuw?
Hoeveel Gold Rushes waren er in de 19e eeuw? - Menselijke veroudering voorspellen,
- De digitale inkomsten van de Britse Guardian-groep overtreffen de print
- Een verhaal over twee telescopen:WFIRST en Hubble
- Koolstofstudie in Amazonewoud onthult inheemse gebieden, beschermde gebieden belegerd, toch de beste klimaatoplossing blijven
- Een maandelijkse budgetcirkelgrafiek maken
- DNA-replicatie in HPV
- Een fundamenteel nieuwe benadering van elektrostatisch ontwerp van materialen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Italian | Norway |

-
Wetenschap © https://nl.scienceaq.com
