Wetenschap
Uber ontwikkelt techniek om voetgangersgedrag te voorspellen, terwijl er nieuwe documenten worden vrijgegeven over het ongeval van vorig jaar
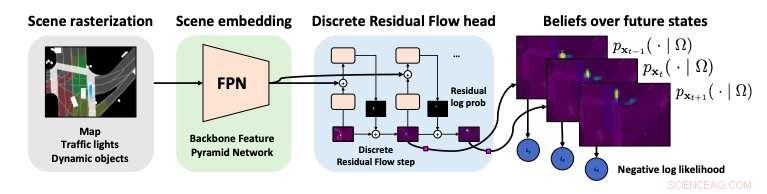
Overzicht van het discrete reststroomnetwerk. Krediet:Jain et al.
In de komende jaren, zelfrijdende voertuigen zouden geleidelijk een populair vervoermiddel kunnen worden. Voordat dit kan gebeuren, echter, onderzoekers zullen hulpmiddelen moeten ontwikkelen die ervoor zorgen dat deze voertuigen veilig zijn en efficiënt kunnen navigeren in door mensen bevolkte omgevingen.
Aangezien zelfrijdende voertuigen uiteindelijk zijn ontworpen om zowel statische als bewegende obstakels te omzeilen, ze moeten objecten snel kunnen detecteren en vermijden. Een manier om dit te bereiken zou kunnen zijn om modellen te ontwikkelen die het toekomstige gedrag van objecten of mensen op straat kunnen voorspellen, om in te schatten waar ze zich zullen bevinden wanneer het voertuig hen nadert.
Het voorspellen van toekomstige veranderingen in stedelijke omgevingen, echter, kan heel uitdagend zijn. Het is vooral moeilijk als het gaat om het voorspellen van menselijk gedrag, zoals de bewegingen of onverwachte acties van voetgangers.
Vorig jaar, een van de zelfrijdende auto's van Uber doodde Elaine Herzberg, een 49-jarige vrouw, in Arizona. Dit ongeval, samen met tientallen anderen, leidde tot veel discussie over de veiligheid van zelfrijdende voertuigen, evenals over de vraag of deze voertuigen moeten worden getest in bevolkte omgevingen.
Ongeveer een week geleden, nieuwe documenten vrijgegeven door de Amerikaanse National Transport Safety Board (NTSB) onthulden dat het autonome voertuig van Uber dat betrokken was bij de dodelijke crash van vorig jaar Herzberg pas als een voetganger identificeerde toen het veel te laat was. Dezelfde rapporten suggereren dat het autonome voertuig dat bij de crash betrokken was, nooit is getraind om voetgangers ergens buiten een zebrapad te detecteren.
Herzberg was aan het jaywalken op het moment van het ongeval, dus de softwarefouten die door het NTSB-rapport worden onthuld, zouden verklaren waarom het zelfrijdende voertuig van Uber haar niet opmerkte, die uiteindelijk haar dood veroorzaakte. De nieuwe analyses die door NTSB zijn vrijgegeven, kunnen een einde maken aan het programma voor zelfrijdende voertuigen van het bedrijf. die in december 2018 opnieuw was begonnen met testen na enkele maanden in de wacht te hebben gestaan.
Deze nieuwe bevindingen benadrukken de noodzaak om geavanceerdere AI en betrouwbaardere software te ontwikkelen voordat zelfrijdende voertuigen op de echte wegen kunnen worden getest. interessant, enkele dagen voordat NTSB deze documenten vrijgaf, een paper van onderzoekers van Uber's Advanced Technologies Group, de Universiteit van Toronto en UC Berkeley was voorgepubliceerd op arXiv, de introductie van een nieuwe techniek om het gedrag van voetgangers te voorspellen, het discrete reststroomnetwerk (DRF-NET). Volgens de onderzoekers is dit neurale netwerk kan voorspellingen doen over toekomstig voetgangersgedrag en tegelijkertijd de inherente onzekerheid vastleggen bij het voorspellen van bewegingen over lange afstand.
"Ons geleerde netwerk legt op effectieve wijze multimodale posteriors vast over toekomstige menselijke bewegingen door de distributie over ruimtelijke locaties te voorspellen en bij te werken en gediscretiseerd, ’ schreven de onderzoekers in hun paper.
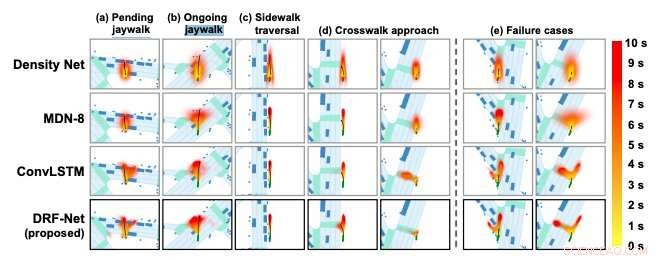
Een van de cijfers in de recente paper die de voetgangersvoorspellingen van het model laat zien. Krediet:Jain et al.
De onderzoekers uitten hun overtuigingen over de toekomstige posities van voetgangers door middel van categorische verdelingen die de ruimte vertegenwoordigen. Vervolgens gebruikten ze deze distributies om paden voor zelfrijdende voertuigen te plannen en te optimaliseren, die rekening houden met de verwachte posities van voetgangers.
Ten eerste, het in hun paper geïntroduceerde DTF-NET-netwerk rastert afbeeldingen van wegenkaarten, wat betekent dat het ze omzet in een afbeelding die is samengesteld uit discrete pixels. Het gedrag van voetgangers wordt dus gecodeerd in een gerasterd beeld in vogelvluchtperspectief, die is uitgelijnd met een gedetailleerde semantische kaart.
Vervolgens, het netwerk extraheert functies die bijzonder nuttig zijn voor het voorspellen van het gedrag van voetgangers uit de gerasterde afbeeldingen. Eindelijk, de onderzoekers trainden hun model om op basis van deze kenmerken het toekomstige gedrag van voetgangers op de weg te voorspellen.
Ze trainden en evalueerden hun neurale netwerk met behulp van een grootschalige dataset die ze eerder hadden samengesteld, die real-world opnames bevat met objectannotaties en online op detectie gebaseerde tracks, verzameld in verschillende steden in Noord-Amerika. Deze opnames omvatten voetpaden die handmatig door de onderzoekers werden geannoteerd in een 360-graden, Weergave over een bereik van 120 meter met behulp van een LiDAR-sensor in het voertuig.
In de evaluaties van de onderzoekers, de DTF-NET techniek presteerde goed, beter presteren dan verschillende andere basismethoden voor het voorspellen van voetgangersgedrag. This method could thus potentially help to enhance the performance of Uber's self-driving vehicles, allowing them to anticipate the movements of pedestrians and plan their paths accordingly.
"The strong performance of DRF-NET's discrete predictions is very promising for cost-based and constrained robotic planning, ’ schreven de onderzoekers.
interessant, the pedestrian behaviors processed and predicted by the DTF-NET network, highlighted in one of the recent paper's figures, include 'pending jaywalk, ' 'ongoing jaywalk' and 'sidewalk traversal, ' as well as crosswalk. This seems somewhat ironic, as among other things, the recent documents released by NTSB highlighted the inability of Uber's self-driving vehicle to detect jaywalking pedestrians at the time of the crash in Arizona.
Only time will tell whether the DRF-NET network or other techniques will actually be able to improve the ability of self-driving vehicles to detect pedestrians. Voorlopig, echter, one thing seems clear:Significant advancements in AI and better techniques for detecting pedestrians will be necessary before self-driving vehicles can be safely put on the road.
© 2019 Wetenschap X Netwerk
 Bos- en zeeresten versterken de maag
Bos- en zeeresten versterken de maag- Type energie opgeslagen in een atoom
- Verschillende delen van een kwikthermometer
- Onderzoekers onthullen gastreactiegestuurde kooi aan Siamese tweelingkooi, mitose-achtige gastheertransformatie
- Gemeenschappelijk antioxidant-enzym kan een mogelijke behandeling bieden voor COVID-19
Hoofdlijnen
- Waarom verplaatsen chloroplasten zich in Elodea?
- Politieke instabiliteit en zwak bestuur leiden tot verlies van soorten, studie vondsten
- Antidepressiva uit urine maken vissen minder bang voor roofdieren
- Nieuwe studie wijst op onverwachte voordelen van rabiësvaccinatie bij honden
- Wat is vriesbreuk en waarom is het nuttig in celbiologie?
- Er is een gemakkelijke manier om mitose en meiose te begrijpen
- Profase: wat gebeurt er in dit stadium van mitose en meiose?
- Hoe overtuigend is een Y-chromosoomprofielmatch tussen verdachte en plaats delict?
- Het mysterie van pollenbuisgeleiding ontrafelen
- Boeing, anderen beoordelen de impact van tarieven tussen de VS en China

- Amazon-werknemers staken terwijl Prime-winkelrazernij toeslaat

- Gouverneur van Californië ondertekent wet waardoor gigwerkers werknemers worden

- Een zelfherstellende en zelfverhullende vingerafdruk van siliconenchips voor sterkere, hardware beveiliging

- Amazon-werknemersgroep roept op tot staking vanwege zorgen over virussen en klimaat


 Maak je klaar voor de Quadrantiden,
Maak je klaar voor de Quadrantiden, - De wereld kijkt toe terwijl Californië een controversieel plan overweegt om tropische bossen te redden
- Deconstructie van het superfood dat de honingbijhiërarchie bepaalt
- Onderzoekers ontdekken nieuw materiaal:zwart zilver
- Hoe sterk is de zwaartekracht op Mars?
- Nieuwe gepatenteerde technologie verwijdert fosfor uit mest
- Welke twee factoren beïnvloeden regio's Fotosynthetische productiviteit?
- Hoe 2D-materialen als eenkristallen te vergroten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Norway | Italian | Danish |

-
Wetenschap © https://nl.scienceaq.com
