Wetenschap
Zwerm kleine drones verkent onbekende omgevingen

De drones verkennen de omgeving door in verschillende richtingen te vliegen. Wanneer een drone een andere drone in de gewenste richting opmerkt, het zal proberen in een andere richting te vliegen. Wanneer dit niet mogelijk is (zoals op deze foto), de drones met een lagere prioriteit zullen uit de weg gaan van de drones met een hogere prioriteit. Drones gaan tijdens het vliegen met obstakels om, en door dit te doen betreedt en verlaat u verschillende kamers. Credit:TU Delft/MAVLab
Onderzoekers hebben een zwerm kleine drones gepresenteerd die volledig zelf onbekende omgevingen kunnen verkennen. Dit werk, gepresenteerd in Wetenschap Robotica op 23 oktober, is een belangrijke stap op het gebied van zwermrobotica. De uitdaging komt voort uit het feit dat de kleine drones van 33 gram autonoom moeten navigeren terwijl ze extreem beperkte detectie- en rekenmogelijkheden hebben. Het gezamenlijke onderzoeksteam – met onderzoekers van de TU Delft, Universiteit van Liverpool en Radboud Universiteit van Nijmegen - gingen deze uitdaging aan door inspiratie te putten uit de relatieve eenvoud van insectennavigatie.
Inspiratie uit de natuur
Insectenzwermen hebben robotici geïnspireerd om te denken dat kleine robots hun individuele beperkingen misschien ook kunnen overwinnen door in een zwerm te werken. Zwermen kleine en goedkope robots zouden taken kunnen uitvoeren die momenteel buiten het bereik van grote, individuele robots. Bijvoorbeeld, een zwerm kleine vliegende drones zou een rampgebied veel sneller kunnen verkennen dan een enkele grotere drone. Dergelijke zwermen zijn nog niet gerealiseerd.
Zoek en Red
In de afgelopen vier jaar, een gezamenlijk onderzoeksteam van de universiteiten van de TU Delft, Universiteit van Liverpool, en Radboud Universiteit Nijmegen, gefinancierd door het NWO programma Natuurlijke Kunstmatige Intelligentie, heeft ernaar gestreefd een zwerm kleine drones te ontwerpen die onbekende omgevingen kunnen verkennen. Het doel van het onderzoeksproject was om stappen te zetten naar het gebruik van zwermen drones in zoek- en reddingsscenario's.
Het belangrijkste idee was dat in de toekomst, reddingswerkers kunnen een zwerm kleine drones loslaten om een rampplek te verkennen, zoals een gebouw dat op instorten staat. De zwerm drones zal het gebouw binnenkomen, verken het, en kom terug naar het basisstation met relevante informatie. De reddingswerkers kunnen hun inspanningen dan richten op de meest relevante gebieden, bijvoorbeeld waar nog mensen binnen zijn.

De kleine drone past in de palm van een hand en weegt 33 gram. Samen met de andere drones in een zwerm, het is in staat om snel een onbemande omgeving te verkennen. Credit:TU Delft/MAVLab
Slachtoffers vinden
In het project werden kleine drones uitgerust met camera's en uitgezonden in een overdekte kantooromgeving om twee dummies te vinden die slachtoffers vertegenwoordigen in een rampscenario. Deze proof-of-concept zoek- en reddingstaak toonde duidelijk het voordeel van het hebben van een zwerm. Binnen zes minuten, een zwerm van zes drones kon ongeveer 80 procent van de open kamers verkennen, wat onmogelijk zou zijn voor een van de drones alleen. Verder, zwermen bleek ook nuttig voor redundantie. Een drone vond een slachtoffer, maar als gevolg van een hardwarestoring van de camera, het kon geen afbeeldingen terugbrengen. Gelukkig, een andere drone legde het slachtoffer vast op camera, ook.
Uitdaging
"De grootste uitdaging bij het bereiken van zwermexploratie ligt op het niveau van de individuele intelligentie van de drones, " zegt Kimberly McGuire, de Ph.D. student die het project heeft uitgevoerd. "In het begin van het project we hebben ons gericht op het bereiken van basisvliegmogelijkheden, zoals het beheersen van de snelheid en het vermijden van obstakels. Daarna, we ontwierpen een methode waarmee de kleine drones elkaar kunnen detecteren en vermijden. We hebben dit opgelost door elke drone een draadloze communicatiechip te laten dragen en vervolgens gebruik te maken van de signaalsterkte tussen deze chips - dit is vergelijkbaar met het aantal balkjes op je telefoon dat afneemt als je weggaat van je wifi-router in je huis. De belangrijkste voordelen van deze methode zijn dat er geen extra hardware op de drone nodig is en dat er heel weinig berekeningen nodig zijn."
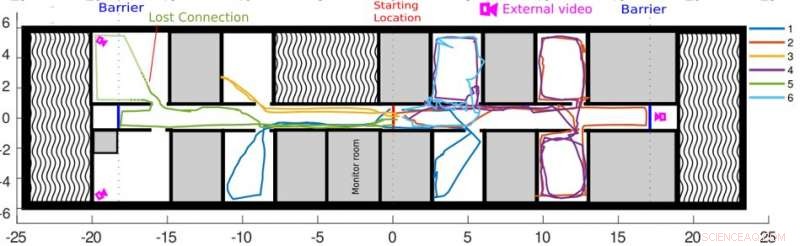
Trajecten van 6 kleine drones die in minder dan 6 minuten een hele kantoorverdieping verkennen. De drones vliegen eerst weg van het basisstation op de startlocatie in het midden, verken de open kamers, en tenslotte terug naar het basisstation Credit:TU Delft/MAVLab
Autonome navigatie
De meest ontmoedigende uitdaging op het gebied van zwermverkenning, is de moeilijkheid om kleine robots zelfstandig door een onbekende omgeving te laten navigeren. De reden hiervoor is dat kleine robots zeer beperkt zijn in termen van detectie en berekening.
Opnieuw, de natuur zorgde voor belangrijke inspiratie. Insecten maken geen zeer gedetailleerde kaarten. In plaats daarvan, ze behouden oriëntatiepunten en gedragsrelevante plaatsen zoals voedselbronnen en hun nest. "Het belangrijkste idee achter de nieuwe navigatiemethode is om onze navigatieverwachtingen tot het uiterste te verminderen:we hebben alleen de robots nodig om terug te kunnen navigeren naar het basisstation, " zegt Guido de Croon, hoofdonderzoeker van het project. "De zwerm robots verspreidt zich eerst in de omgeving door elke robot een andere voorkeursrichting te laten volgen. Na het verkennen, de robots keren terug naar een draadloos baken bij het basisstation."
Bug-algoritme
"De voorgestelde navigatiemethode is een nieuw type bug-algoritme, ", voegt Kimberly McGuire toe. "Bug-algoritmen maken geen kaarten van de omgeving, maar lossen obstakels on the fly op. In principe, gedetailleerde kaarten zijn erg handig, omdat ze een robot in staat stellen om van elk punt op de kaart naar een ander punt te navigeren, langs een optimaal pad. Echter, de kosten van het maken van zo'n kaart op kleine robots zijn onbetaalbaar. Het voorgestelde bug-algoritme leidt tot minder efficiënte paden, maar heeft de verdienste dat het zelfs op kleine robots kan worden geïmplementeerd."
 Urethane versus polyurethaan
Urethane versus polyurethaan - Twist and shine:ontwikkeling van een nieuw fotoluminescerend sensormateriaal
- Team ontdekt dat polymorfe selectie tijdens kristalgroei thermodynamisch kan worden aangestuurd
- Studie biedt nieuwe inzichten voor technologieën voor het verzamelen van de zon
- Kevers zorgen voor ontwikkeling van kleurveranderende nanodeeltjes voor commercieel gebruik
- Brandend probleem:branden in Indonesië zetten palmolie onder de loep
- Meerderheid grondwatervoorraden bestand tegen klimaatverandering
- Chemische voetafdruk in de huidige atmosfeer bootst die waargenomen in oud gesteente na
- Algengroei vermindert reflectiviteit, versterkt het smelten van de Groenlandse ijskap
- Aardbeving Tohoku-oki 2011:resultaten van seismische reflectiegegevens
Hoofdlijnen
- Reuzenzeebaars heeft meer waarde als levend, onderzeese wonderen ademen dan als commerciële vangst
- Team ontdekt nieuwe mechanismen voor DNA-stabiliteit
- Wat zijn twee manieren waarop Enzymen minder effectief worden?
- Superbugs gevonden op Olympische zwemplekken in Rio
- Wat gebeurt er in de interfase van de celcyclus?
- Hoe kunnen kinderen van dezelfde ouders er zo verschillend uitzien?
- Community (ecologie): definitie, structuur, theorie en voorbeelden
- Zal de Hayflick-limiet ons ervan weerhouden om voor altijd te leven?
- Wat is het dominante fenotype?
- Barca eSport-team klaar om het op te nemen tegen andere grote clubs

- China legt avondklok op aan minderjarigen bij hardhandig optreden tegen gamen

- Significante ontwikkelingen in het in kaart brengen van het gamma voor de filmindustrie
- Elektrische voertuigen als voorbeeld van marktfalen

- Nieuw systeem zendt met hoge snelheid een niet-herhaald signaal uit over 520 kilometer


 Onderzoekers ontrafelen de geheimen van hoe natuursteen gloeit in het donker
Onderzoekers ontrafelen de geheimen van hoe natuursteen gloeit in het donker- Vulkaan F is de oorsprong van drijvende stenen
- Wetenschappers ontwikkelen nieuwe, snelle pijplijn voor antimicrobiële stoffen
- Nieuwe mastodontsoort ontdekt in Californië
- Stukje bij beetje, een oplossing om de wegversperring voor energieopslag omver te werpen
- De verschillen in bossen, bossen en oerwouden
- Zijn planeten zoals die in Star Wars:Rogue One echt daarbuiten? NASA is van plan om erachter te komen
- Waarom worden vogels niet geëlektrocuteerd op elektrische draden?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | French |

-
Wetenschap © https://nl.scienceaq.com
