Wetenschap
Robot vangt bal zonder codering
Dit onderzoeksresultaat laat zien dat robots intuïtief kunnen worden geleerd om flexibel te zijn door mensen, omdat het niet werd bereikt door numerieke berekening of programmering van de bewegingen van de robot. Krediet:Korea Institute of Science and Technology (KIST)
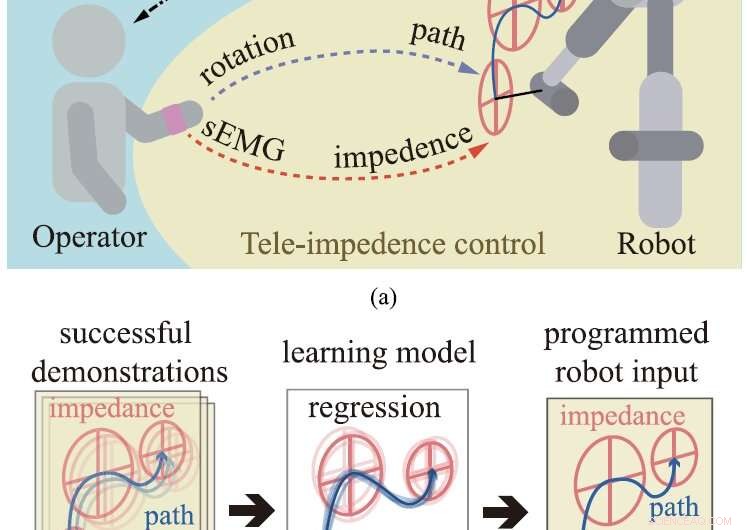
Het team van Dr. Kee-hoon Kim bij het Center for Intelligent &Interactive Robotics van het Korea Institute of Science and Technology (KIST) ontwikkelde een manier om 'impedantiegestuurde robots' te onderwijzen door middel van menselijke demonstraties met behulp van oppervlakte-elektromyogrammen (sEMG) van spieren, en slaagde erin een robot te leren een gevallen bal te vangen als een voetballer. Een oppervlakte-elektromyogram is een elektrisch signaal dat wordt geproduceerd tijdens spieractivering en dat kan worden opgepikt op het oppervlak van de huid.
Recent ontwikkelde impedantiegestuurde robots hebben een nieuw tijdperk van robotica geopend op basis van de natuurlijke elasticiteit van menselijke spieren en gewrichten, die conventionele starre robots missen. Van robots met flexibele gewrichten wordt verwacht dat ze kunnen rennen, horden springen en sporten zoals mensen. Echter, de technologie die nodig is om dergelijke robots op deze manier te leren bewegen, was tot voor kort niet beschikbaar.
Het KIST-onderzoeksteam ontwikkelde als eerste ter wereld een manier om impedantiegestuurde robots nieuwe bewegingen aan te leren met behulp van menselijke spiersignalen. Met deze technologie, die niet alleen menselijke bewegingen detecteert, maar ook spiercontracties door middel van sEMG, het is nu mogelijk geworden voor robots om bewegingen na te bootsen op basis van menselijke demonstraties.
Het team van Dr. Kee-hoon Kim is erin geslaagd sEMG te gebruiken om een robot te leren een snel vallende bal snel en behendig te vangen voordat deze in contact komt met een vast oppervlak of te ver stuitert om te bereiken - vergelijkbaar met de vaardigheden die worden gebruikt door voetballers.
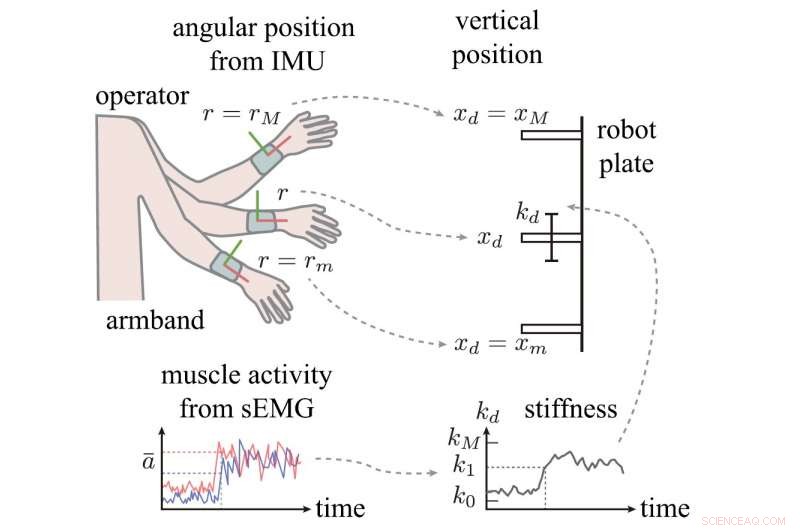
SEMG-sensoren waren bevestigd aan de arm van een man, waardoor hij tegelijkertijd de locatie en flexibiliteit van de snelle opwaartse en neerwaartse bewegingen van de robot kan regelen. Krediet:Korea Institute of Science and Technology (KIST)
SEMG-sensoren waren bevestigd aan de arm van een man, waardoor hij tegelijkertijd de locatie en flexibiliteit van de snelle opwaartse en neerwaartse bewegingen van de robot kan regelen. De man "leerde" de robot vervolgens hoe hij een snel vallende bal moest vangen door een persoonlijke demonstratie te geven. Na het leren van de beweging, de robot was in staat om vakkundig een gevallen bal te vangen zonder enige hulp van buitenaf.
Dit onderzoeksresultaat, waaruit blijkt dat robots intuïtief kunnen worden geleerd om flexibel te zijn door mensen, heeft veel aandacht getrokken, omdat het niet werd bereikt door numerieke berekening of programmering van de bewegingen van de robot. Deze studie zal naar verwachting bijdragen aan de studie van interacties tussen mensen en robots, brengt ons een stap dichter bij een wereld waarin robots een integraal onderdeel zijn van ons dagelijks leven.
Kim zei, "De uitkomst van dit onderzoek, dat zich richt op het aanleren van menselijke vaardigheden aan robots, is een belangrijke prestatie in de studie van interacties tussen mensen en robots."
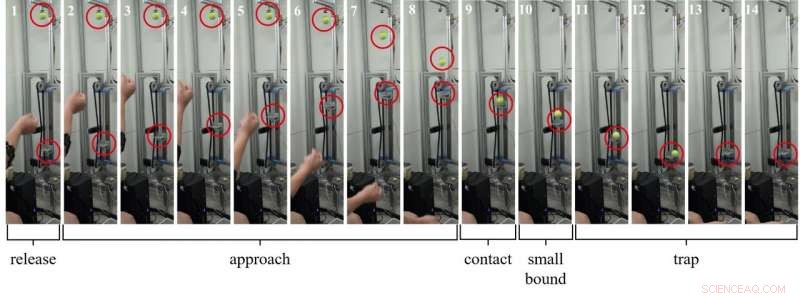
Demonstratie van een robot om de bal te vangen zonder te coderen. Krediet:Korea Institute of Science and Technology (KIST)
 Hoe stalen buizen te lassen
Hoe stalen buizen te lassen - Nieuwe buigbare smartphonetechnologie kan monitoring gebruiken om levens van patiënten te redden
- Opschalen van biohybride systemen om brandstoffen te synthetiseren, Chemicaliën
- Wat zijn de eigenschappen en kenmerken van statische elektriciteit?
- Nieuw materiaal breekt wereldrecord voor het omzetten van warmte in elektriciteit
- Wat is het verschil tussen cumuluswolken en cirruswolken?
In de meeste gevallen betekenen cirrus en cumuluswolken allebei mooi weer. Er zijn echter duidelijke verschillen tussen deze twee typen wolken, waaronder verschillen in hoogte en vorm. De La
- NASA ziet nieuw gevormde tropische depressie 08W in de Zuid-Chinese Zee
- EPA streeft naar nieuwe regels voor vervuiling door vrachtwagens; zegt dat lucht niet zal lijden
- Illegale houtkap in Brazilië verandert Amazon in een kruitvat
- Onderzoeker voorspelt toekomst waarin mensen leven van insecten
Hoofdlijnen
- Hoe reageert het excretiesysteem op fysieke activiteit?
- Celstructuren en hun drie belangrijkste functies
- Tumorsuppressorgenen: wat is het?
- Cytoplasma bacteriecellen
- Evolutionaire relaties tussen prokaryoten en eukaryoten
- Bioloog onderzoekt de voor- en nadelen van virtuele en augmented reality bij het lesgeven in milieukunde
- Feiten over lipiden
- Projectideeën om het menselijke spijsverteringsstelsel te laten zien op de middelbare school voor studenten
- Centrosoom: definitie, structuur en functie (met diagram)
- Waarom verkopers nog steeds handtekeningen nodig hebben voor creditcardaankopen als dat niet nodig is?

- Slimme artikelverzamelende robots verschijnen voor magazijndienst

- Flickr verliest geld, en CEO Don MacAskill vraagt gebruikers van de website voor het delen van foto's om financiële hulp

- Facebook verliest oude productchef terwijl het de strategie vernieuwt

- Apple neemt de kroon op de verkoop van smartphones van Samsung


 VS had 3e warmste en 2e natste jaar tot nu toe
VS had 3e warmste en 2e natste jaar tot nu toe- De verschillen tussen noordelijk en zuidelijk halfrond
- Belangrijke mijlpaal voor kernfusie bereikt toen ontsteking in een laboratorium werd geactiveerd
- Klimaatwetenschapper ziet decor voor herhaling van ergste droogte hongersnood
- Waar is je provinciehoofdstad? Een moderne wiskundige methode voor het berekenen van geografische centra
- Honderden vluchten geschrapt omdat nieuwe staking Duitse luchthavens treft
- Overeenkomsten en verschillen tussen kubussen en cuboïden
- Koolstofput in tropische bossen wordt al snel zwakker
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
