Wetenschap
Skinflow:een zachte robothuid op basis van vloeistoftransmissie
Krediet:Soter et al.
Onderzoekers van het Bristol Robotics Laboratory en de University of Bristol hebben onlangs een nieuwe zachte robotachtige huidachtige sensor ontwikkeld die is gebaseerd op fluïdische transmissie. Deze voeler, gepresenteerd op de tweede IEEE International Conference on Soft Robotics (RoboSoft), interessante toepassingen kunnen hebben op verschillende gebieden, variërend van robotica tot virtual reality (VR).
"Het integreren van sensoren in robothanden is een moeilijke taak omdat vaak we moeten veel componenten in een beperkte ruimte persen, "Gabor Soter, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Ons idee was om de sensorische signalen naar andere delen van het lichaam te sturen, waar meer ruimte is voor de detectie- en verwerkingshardware."
huidstroom, de sensor ontwikkeld door Soter en zijn collega's, is deels geïnspireerd door biologische mechanismen die zijn waargenomen bij spinnen. Spinnen kunnen hydraulische druk overbrengen naar verschillende delen van hun lichaam voor activeringsdoeleinden. Met andere woorden, ze kunnen druk genereren in hun lichaam en deze energie doorgeven aan hun benen om ze te bewegen.
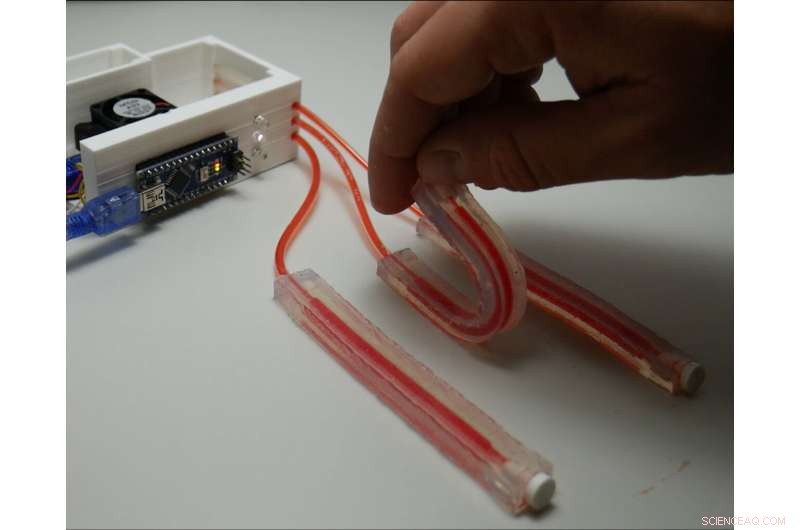
De onderzoekers probeerden dit mechanisme te reproduceren door met vloeistof gevulde zachte siliconenkamers te combineren met optische sensoren die druk meten, buigen en trillen. Skinflow heeft drie belangrijke componenten:een zachte huid gevuld met gekleurde vloeistof, een beeldscherm en een camera. Wanneer het mechanisch wordt gestimuleerd, het volume van de siliconenkamers verandert, en deze verandering wordt via een onsamendrukbare, gekleurde vloeistof.
"Door interactie met de huid, het volume van de kamers van Skinflow verandert en dit verdringt de gekleurde vloeistof, Soter legt uit. "De vloeistofverplaatsing wordt gemeten door een camera en we gebruiken beeldverwerkingsalgoritmen om deze verandering te kwantificeren. Op deze manier, we kunnen de locatie en intensiteit van de interactie van de gebruiker met de robothuid terug berekenen."
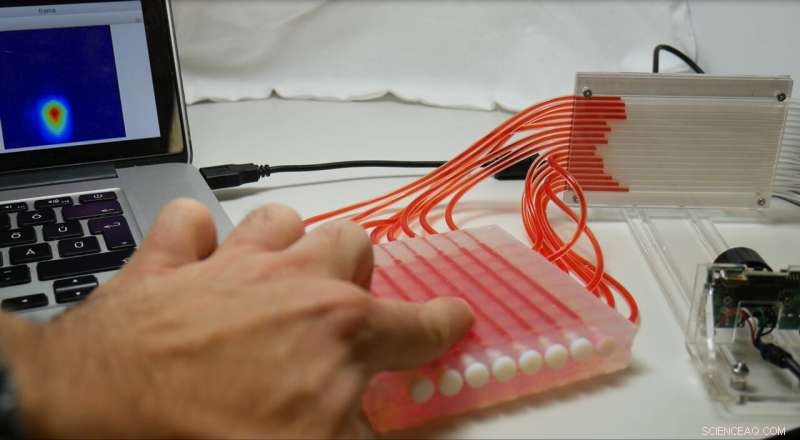
Het touchpad ontwikkeld met Skinflow. Krediet:Soter et al.
Skinflow-sensoren zijn opmerkelijk goedkoop, schaalbaar en veilig te gebruiken in menselijke omgevingen. In hun studie hebben de onderzoekers presenteerden drie mogelijke implementaties voor hun sensor. Eerst, ze gebruikten het om een zachte knoppenreeks te maken met vier drukgevoelige knoppen.
Ze gebruikten het ook om een 3D soft touchpad te bouwen dat bestaat uit twee sensorlagen die 90 graden ten opzichte van elkaar zijn georiënteerd. die beide acht macrokanalen hebben gevuld met gekleurde vloeistof. Bij deze uitvoering Skinflow werd gebruikt om de positie en intensiteit van de aanraking van een gebruiker te meten.
Eindelijk, de onderzoekers integreerden de sensor met een smart vision camera en microcontroller. Vervolgens hebben ze drie zachte buigsensoren aangesloten op de verwerkingseenheid van een apparaat en gebruikten ze om de helderheid van drie LED-lampen in realtime te regelen door ze te buigen.
"Skinflow zou veel toepassingen kunnen hebben, waaronder virtual reality, robotica, gezondheidszorg, slimme huizen, draagbare technologie en telemanipulatie, Soter zei. "Het is ook een veelbelovende technologie voor toepassingen waar standaard elektronische componenten niet kunnen worden gebruikt vanwege elektromagnetische interferentie, bijvoorbeeld in magnetische resonantie beeldvorming (MRI) scanners, of radioactiviteit, bijvoorbeeld in kerncentrales."
In de toekomst, de sensor die door Soter en zijn collega's is ontwikkeld, zou kunnen helpen bij de ontwikkeling van een breed scala aan innovatieve en slimme technologieën. De onderzoekers experimenteren momenteel met Skinflow en gebruiken het om nieuwe draagbare apparaten en apparaten voor menselijke interactie te ontwikkelen.
© 2019 Wetenschap X Netwerk
 Volledig biologische landbouw zou de uitstoot in het VK kunnen verhogen:studie
Volledig biologische landbouw zou de uitstoot in het VK kunnen verhogen:studie- De ontbrekende schakel tussen exploderende sterren, wolken, en klimaat op aarde
- Lava die in zee stroomt, creëert delta, breidt Spaans eiland uit
- Hoe beïnvloedt de jacht het milieu?
- Monitoring lavameerniveaus in Congo-vulkaan
Hoofdlijnen
- Zonder te ruimen, Victoria's plan voor wilde paarden lijkt te mislukken
- Nieuwe tools helpen bij het zoeken naar levensverlengende chemicaliën
- Reflecteert Saturnus licht?
- Onderzoek wijst achteruitgang van arctische kustvogels aan
- Wat zijn de vier fasen van volledige glucose-afbraak?
- RIP Jeremy de lefty tuinslak
- Wat gebruikt Gamma Roggen?
- Landbouwproductiviteit dreef de Euro-Amerikaanse nederzetting van Utah
- Hoe bekritiseer je iets zonder een eikel te zijn?
- Diepgaand leren verlicht geleerden die puzzelen over oude teksten
- Onderzoekers begroeten de ondergang van een online beveiligingsalgoritme

- Weibo ziet uitbreiding naar Chineessprekende wereld

- Facebook op 15:het is niet allemaal slecht, maar nu moet het goed zijn

- Er is een reden waarom AI zo slecht is in gesprekken


 Nieuwe bevindingen:verschillen in fijnstof kunnen onderzoeken naar luchtverontreiniging een nieuwe vorm geven
Nieuwe bevindingen:verschillen in fijnstof kunnen onderzoeken naar luchtverontreiniging een nieuwe vorm geven- Natuurkundigen krijgen nieuwe inzichten in nanosystemen met bolvormige opsluiting
- NASA selecteert SpaceX voor missie naar Jupiter-maan Europa
- Onderzoekers ontstemmen een molecuul:experiment laat zien hoe atoombindingen in een buckyball kunnen worden verzacht
- GOES-16-satelliet stuurt eerste beelden van de aarde
- Stone tool vertelt het verhaal van de jacht op de Neanderthalers
- Apparaten omzetten van 220 naar 110
- Onzekerheid rond schattingen van methaanuitstoot door vee in de VS
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
