Wetenschap
PoseRBPF:een nieuw deeltjesfilter voor het volgen van 6D-objecten

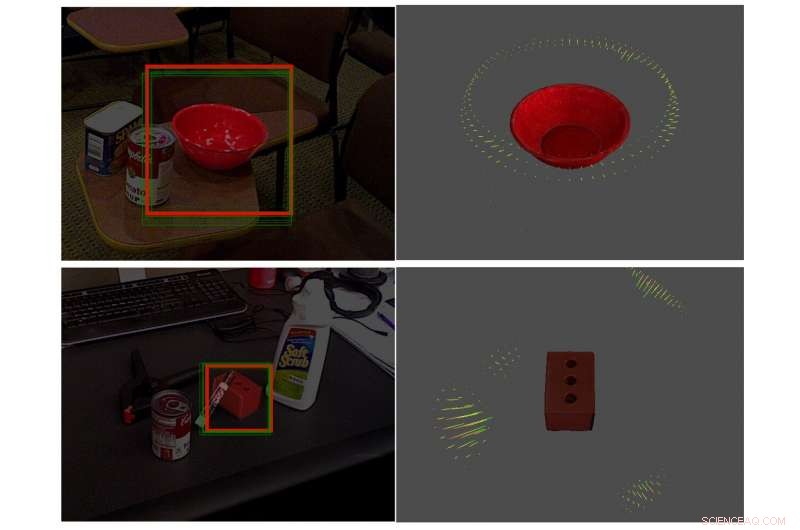
Visualisatie van rotatieverdelingen. De lijnen vertegenwoordigen de kans op rotaties die hoger zijn dan een drempel. De lengte van elke lijn is evenredig met de waarschijnlijkheid van dat gezichtspunt. Zoals te zien is, PoseRBPF vertegenwoordigt van nature onzekerheden als gevolg van verschillende soorten symmetrieën, inclusief rotatiesymmetrie van de kom, spiegelsymmetrie van de schuimsteen, en discrete rotatiesymmetrieën van de T-LESS objecten aan de rechterkant. Krediet:Deng et al.
Onderzoekers van NVIDIA, Universiteit van Washington, Stanford universiteit, en Urbana-Champaign van de Universiteit van Illinois hebben onlangs een Rao-Blackwellized-deeltjesfilter ontwikkeld voor het volgen van 6D-poses, genaamd PoseRBPF. De aanpak kan de 3D-translatie van een object en de volledige verdeling ervan over de 3D-rotatie effectief schatten. Het document dat dit filter beschrijft, voorgepubliceerd op arXiv, zal worden gepresenteerd op de komende Robotics Science and Systems Conference in Freiburg, Duitsland.
Het volgen van 6D-poses van objecten in video's kan de prestaties van robots bij verschillende taken verbeteren, inclusief manipulatie- en navigatietaken. De meeste bestaande technieken voor het schatten van objectposities proberen een enkele schatting te voorspellen voor de 6D-pose (d.w.z. xyz-translatie en 3D-oriëntatie) van een object in elk cameraframe.
Deze methoden hebben een aantal beperkingen en problemen. Bijvoorbeeld, ze zijn niet in staat om de pose van gedeeltelijk of volledig afgesloten objecten te onderscheiden. Bovendien, er zijn situaties waarin vanwege symmetrieën, er is niet één juist antwoord voor de pose van een object, wat de taak nog ingewikkelder maakt.
"Het blijkt dat veel objecten in onze dagelijkse omgeving symmetrisch zijn, zoals dinerborden, kommen, flessen, of kubussen, " Arsalan Mousaviaan, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Deze objecten hebben geen unieke 3D-oriëntatie omdat ze er vanuit veel verschillende kijkhoeken identiek uitzien. Om deze problemen te omzeilen, we hebben een methode voorgesteld om de volledige verdeling van de pose van een object (in tegenstelling tot de schatting van een enkele pose) door de tijd heen te volgen. Deze verdeling geeft nauwkeurig de onzekerheid in de pose van het object weer, en tracking in de loop van de tijd helpt de pose van het object ondubbelzinnig te maken. Bijvoorbeeld, als een object op een bepaald moment zichtbaar is en verstopt raakt, de methode kan de pose herstellen door deze van eerdere frames te volgen."
PoseRBPF, de aanpak ontwikkeld door Mousavian en zijn collega's, kan de volledige verdeling over de 6D-pose volgen (d.w.z. 3D-vertaling, 3D-oriëntatie) van een bepaald object, met betrekking tot een bepaalde camera. Kansverdelingen over 6D-ruimte zijn zeer complex, dus als ze niet goed worden gemeten, is het onmogelijk om ze in realtime bij te werken. Om de nauwkeurigheid van bijgehouden distributies te garanderen, de onderzoekers ontkoppelden hun schattingen van 3D-objectvertaling en 3D-objectoriëntatie met behulp van een techniek genaamd Rao-Blackwellized-deeltjesfiltering.
"Bij Rao-Blackwellized deeltjesfiltering, de objectvertalingen worden weergegeven door samples, of deeltjes, en de oriëntatie wordt gediscretiseerd in kleine stukjes van bijna 200, 000 mogelijke oriëntaties, Mousavian legde uit. "We gebruikten een diepgaande leertechniek om vooraf de inbeddingen te berekenen die representeren hoe het object eruit zou kunnen zien in al deze oriëntaties en onder willekeurige lichtomstandigheden. Profiteren van sterk parallelle NVIDIA GPU-verwerking, onze aanpak kan vervolgens het huidige camerabeeld vergelijken met deze vooraf berekende inbeddingen voor alle mogelijke oriëntaties en de distributie in realtime bijwerken."
Bij elke tijdstap, de door de onderzoekers bedachte aanpak werkt de verzameling deeltjes bij door middel van bemonstering van de vorige deeltjesverzameling, een model volgen dat voorspelt hoe het object en de camera van de ene stap naar de andere kunnen bewegen. Met dit proces kan PoseRBPF in de loop van de tijd informatie verzamelen, wat op zijn beurt leidt tot robuustere en nauwkeurigere schattingen van de pose.
-
Visualisatie van rotatieverdelingen. Krediet:Deng et al.
-

Illustratie van de berekening voor de voorwaardelijke rotatiewaarschijnlijkheid door codeboekmatching. Links) Elk deeltje snijdt de afbeelding bij op basis van zijn translatiehypothese. De RoI voor elk deeltje wordt verkleind en de bijbehorende code wordt berekend met behulp van de encoder. Rechts) De rotatieverdeling P(R|Z, T) wordt berekend uit de afstand tussen de code voor elke hypothese en die in het codeboek. Krediet:Deng et al.
-

Voor elk deeltje de oriëntatieverdeling wordt geschat op basis van translatieschatting, terwijl de schatting van de vertaling wordt geëvalueerd met de bijbehorende RoI's. Krediet:Deng et al.
-
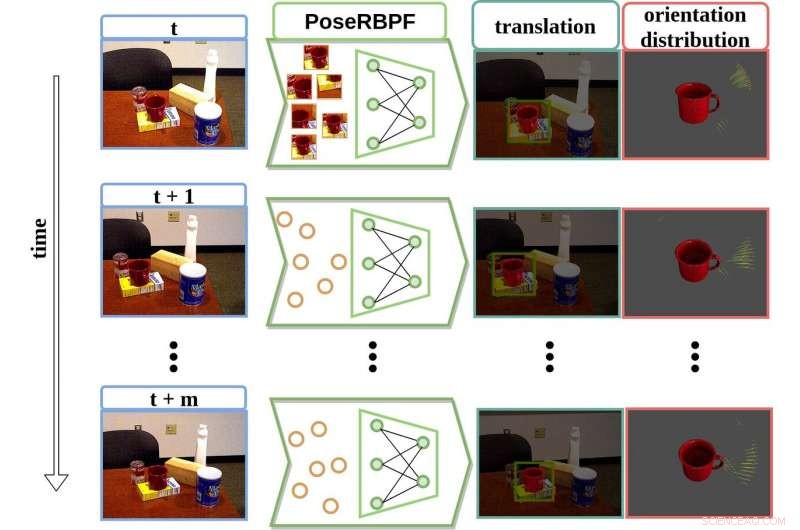
Overzicht van PoseRBPF-framework voor het volgen van 6D-objecten. Krediet:Deng et al.
-

Visualisatie van rotatieverdelingen. De lijnen vertegenwoordigen de kans op rotaties die hoger zijn dan een drempel. De lengte van elke lijn is evenredig met de waarschijnlijkheid van dat gezichtspunt. Zoals te zien is, PoseRBPF vertegenwoordigt van nature onzekerheden als gevolg van verschillende soorten symmetrieën, inclusief rotatiesymmetrie van de kom, spiegelsymmetrie van de schuimsteen, en discrete rotatiesymmetrieën van de T-LESS objecten aan de rechterkant. Krediet:Deng et al.
Door oriëntatieschatting op vertaling te conditioneren, het door Mousavian en zijn collega's voorgestelde volgsysteem kan op effectieve wijze complexe onzekerheidsverdelingen weergeven over de ruimte van 6-D-objectposities. Hun raamwerk biedt ook onzekerheidsinformatie over de pose van een bepaald object, die met name nuttig kunnen zijn bij robotmanipulatietaken. Bovendien, het systeem is getraind met behulp van synthetische en niet-geannoteerde gegevens, het kan onderzoekers dus de tijd en middelen besparen die worden besteed aan het annoteren van gegevens.
"Onze methode combineert het klassieke Bayesiaanse schattingskader van deeltjesfiltering met diep leren, " zei Mousavian. "Het brengt daardoor gevestigde schattingstechnieken samen die in de afgelopen decennia zijn ontwikkeld en de kracht van recente diepgaande leerbenaderingen. Als resultaat, PoseRBPF kan poses van willekeurige objecten robuust inschatten, inclusief symmetrische."
De onderzoekers evalueerden hun aanpak op twee 6D pose-schattingsdatasets:de YCB-videodataset en de T-LESS-dataset. PoseRBPF behaalde state-of-the-art resultaten, beter presteren dan andere pose-inschattingstechnieken. In de toekomst, het door Mousavian en zijn collega's ontwikkelde deeltjesfilter zou de prestaties van robots in verschillende omgevingen kunnen verbeteren, bijvoorbeeld door hun mogelijkheden voor objectmanipulatie te verbeteren.
"Vooruit gaan, we zullen onderzoeken hoe we de onzekerheidsschattingen van PoseRBPF kunnen gebruiken in de context van objectmanipulatie, Mousavian zei. "Een andere mogelijkheid voor toekomstig werk is om de camera actief te bewegen om de onzekerheid in de pose van een object te verminderen, zoals het bekijken van een object vanuit een ander gezichtspunt om dubbelzinnigheid op te lossen."
© 2019 Wetenschap X Netwerk
 Welke elementen zijn er in lipiden?
Welke elementen zijn er in lipiden? - Tumbleweeds of fibrillen:Tau-eiwitten moeten kiezen
- Laser onthult elektronisch geëxciteerde hydroxyl-superrotors in waterfotochemie
- Video:Gallium en de geschiedenis van het periodiek systeem
- Nieuwe aanpak kan leiden tot ontworpen kunststoffen met specifieke eigenschappen
- Behoud van visbiomassa de sleutel tot het behoud van de biodiversiteit van rifvissen
- ENSO beïnvloedt trans-Pacific ozontransport door vegetatiebranden in Zuidoost-Azië
- Hoe beschermen zeeschildpadden zich?
- Onzekerheid over toekomstige opname van kooldioxide in Zuidelijke Oceaan gehalveerd
- Canada zet stappen om milieubeoordelingen van energieprojecten te versnellen
Hoofdlijnen
- Ontdekking van gewasgenen raakt de wortel van voedselzekerheid
- Kunnen we Neanderthalers terugbrengen?
- Welk type organisch macromolecuul is glucose?
- Sommige mariene soorten zijn kwetsbaarder voor klimaatverandering dan andere
- Peroxisomen: defintie, structuur en functie
- 10 misvattingen over GGO's
- Vetzuur: definitie, metabolisme en functie
- Veren hebben hun eigen geuren, en roofdieren weten het
- Onderzoekers gebruiken het ritme van DNA-replicatie om kankercellen te doden
- GPU-nieuws:tijd voor een nieuwe poging op een waferscale-computer
- Onderzoek vindt een nieuwe manier om Siri en Google Assistant te hacken met ultrasone golven

- Duitse markt remt hoogfrequente handelaren

- Maker van antivirussoftware Sophos stemt in met overname £ 3,1 miljard

- Winst van Google-moederalfabet springt op advertentiegroei (update)


 Ongebruikelijke ultralichte röntgenbron ontdekt in de melkweg Messier 86
Ongebruikelijke ultralichte röntgenbron ontdekt in de melkweg Messier 86- Inslagen op asteroïden produceren regoliet, kleine kraters wissen
- Onderzoekers realiseren een enkele full-field-of-view reconstructie fourier ptychografische microscopie
- Nieuwe manier om staal te maken dat zowel sterker als taaier is
- Nanodeeltjes presenteren duurzame manier om voedselgewassen te verbouwen
- Waterschaarste verminderen door verontreinigde grondwaterlagen te herstellen
- Overname Bayers Monsanto minder lucratief dan verwacht
- Oude tech nieuwe trucs leren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
