Wetenschap
Sensoren gebruiken om de interactie tussen mensen en robots die samen lopen te verbeteren

Het SensFoot-apparaat. Krediet:Moschetti et al
Onderzoekers van het BioRobotics Institute of Scuola Superiore Sant'Anna, Co-Robotics srl en Sheffield Hallam University hebben onlangs een nieuwe benadering voorgesteld om de interactie tussen mens en robot te verbeteren terwijl ze samen lopen. hun papier, gepubliceerd in MDPI's Robotica logboek, stelt het gebruik van draagbare sensoren voor als middel om de samenwerking tussen een mens en een robot die zich in een gedeelde omgeving voortbewegen te verbeteren.
Recente technologische ontwikkelingen hebben de inzet van robots als assistenten in een breed scala van alledaagse situaties mogelijk gemaakt. Om goed te presteren in de meeste van deze instellingen, echter, robots moeten naadloos en effectief kunnen communiceren met menselijke gebruikers. Onderzoekers hebben daarom benaderingen en technieken ontwikkeld om het vermogen van robots om sociale signalen te begrijpen te verbeteren en dienovereenkomstig te reageren.
In hun studie hebben het team richtte zich met name op taken waarbij mensen en robots samen lopen of een taak uitvoeren waarbij staan en bewegen in een gedeelde omgeving. Hun doel was om een aanpak te ontwikkelen waarmee mensen op natuurlijke wijze in een bepaalde ruimte kunnen bewegen, samen met een robot, zonder de noodzaak van fysieke verbindingen tussen de twee.
"Dit artikel stelt het gebruik van draagbare traagheidsmeeteenheden (IMU's) voor om de interactie tussen mens en robot te verbeteren terwijl ze samen lopen zonder fysieke verbindingen en zonder beperking van de relatieve positie tussen de mens en de robot, ’ schreven de onderzoekers in hun paper.
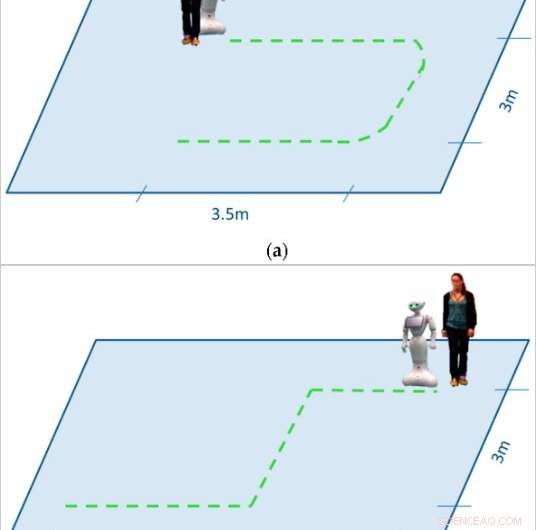
Schema van de volgende taak (a) en volg-mij-taak (b). Krediet:Moschetti et al.
De door de onderzoekers voorgestelde aanpak omvat het gebruik van IMU-sensoren, dat zijn elektronische apparaten die oriëntatie meten en rapporteren, snelheid en andere gegevens met betrekking tot bewegingen, meestal met behulp van versnellingsmeters, gyroscopen en/of magnetometers. Deze sensoren worden door mensen gedragen (bijvoorbeeld aan hun schoenen) zonder dat ze ongemak veroorzaken, waardoor ze vrij kunnen bewegen in hun omringende ruimte.
De IMU's verzamelen realtime informatie over de bewegingen van de menselijke gebruiker en loopgerelateerde parameters (bijv. loopsnelheid, paslengte, oriëntatie hoek, enzovoort.). Vervolgens, deze gegevens worden verwerkt en gebruikt om de beweging van de robot vorm te geven, uiteindelijk het creëren van een meer natuurlijke interactie tussen de twee agenten.
De onderzoekers bouwden een prototype IMU-systeem genaamd SensFoot en evalueerden de nauwkeurigheid en werkzaamheid ervan in een reeks experimenten waarbij mensen en robots met elkaar in wisselwerking stonden. Ze rekruteerden 19 menselijke deelnemers en vroegen hen om twee verschillende taken uit te voeren, die ze een "volgtaak" en een "volg-mij"-taak noemen.
Eerst, ze verifieerden de nauwkeurigheid van hun systeem door de loopinformatie te vergelijken die werd berekend door een referentievisiesysteem met die afgeleid van gegevens die door de IMU's werden verzameld. Vervolgens, ze testten de sensoren in een echt mens-robot-interactiescenario.
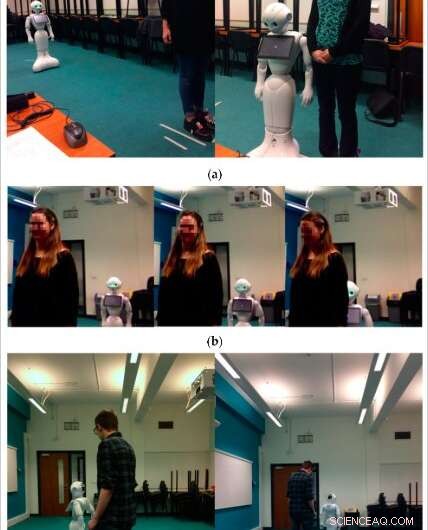
Voorbeeld van tests met gebruikers (a) en sequenties uit de volgende taak (b) en volg-mij-taak (c). Krediet:Moschetti et al.
"We experimenteerden met 19 menselijke deelnemers in twee verschillende taken, om real-time evaluaties van gangparameters te bieden voor een mobiele robot die samen met een mens beweegt, en bestudeerde de haalbaarheid en de waargenomen bruikbaarheid door de deelnemers, " schreven de onderzoekers. "De resultaten tonen de haalbaarheid van het systeem, die positieve feedback kreeg van de gebruikers, waardevolle informatie geven voor de ontwikkeling van een natuurlijk interactiesysteem, waar de robot menselijke bewegingen waarneemt door middel van draagbare sensoren."
De evaluaties van de onderzoekers leverden veelbelovende resultaten op, wat suggereert dat het gebruik van IMU's de interacties tussen mensen en robots die zich door een gedeelde ruimte verplaatsen aanzienlijk zou kunnen verbeteren. Bovendien, de feedback van deelnemers die de sensoren testten, was overweldigend positief. In de toekomst, de door de onderzoekers voorgestelde aanpak zou de weg kunnen effenen voor meer adaptieve en efficiënte ondersteunende robotica-oplossingen die de integratie van IMU's of andere sensoren met algoritmen voor machine learning inhouden.
"Toekomstige werken betreffen de mogelijkheid om de systeemperceptie van de wandelende gebruiker te verbeteren, het verbeteren van de nauwkeurigheid in geëxtraheerde parameters, en het aanpassingsvermogen van de robot, het overwinnen van de huidige beperkingen in controle en integratie, ’ schreven de onderzoekers.
© 2019 Wetenschap X Netwerk
 Onderzoekers ontwikkelen DNA-zonnebrandcrème die beter wordt naarmate je hem langer draagt
Onderzoekers ontwikkelen DNA-zonnebrandcrème die beter wordt naarmate je hem langer draagt- Fijnafstemming van de aangeslagen toestand van Ru(II)-fotosensibilisatoren voor het stimuleren van de omzetting van kooldioxide
- Onderzoekers fabriceren transparant keramiek van hoge kwaliteit
- De effecten van zout water op metalen
- Wetenschappers hebben de oorsprong van de bouwstenen van het leven ontdekt
- Nieuw briefingdocument over Arctische verandering
- Multigetalenteerde mangroven:schijnwerpers op de bomen die de planeet kunnen redden
- NASA vangt laatste adem van tropische cycloon 01ss in zuidelijke Indische Oceaan
- Klimaatwetenschappers bereiken ondubbelzinnige consensus over door de mens veroorzaakte opwarming in historisch rapport
- Om de klimaatdoelstellingen van Parijs te halen, is een substantiële herverdeling van wereldwijde investeringen nodig
Hoofdlijnen
- Studie onthult nieuw inzicht in onsterfelijke plantencellen
- Een beetje stress is goed voor de gezondheid van de cellen en een lang leven
- Wat zijn de vier rollen die DNA in cellen moet spelen?
- Boomwoning, kokosnootkrakende gigantische rat ontdekt op de Salomonseilanden
- Wetenschappers ontdekken dat genen worden aangestuurd door nanovoetballen
- Vogelgriep:Nederlandse boeren moeten pluimvee binnen houden
- Wat is Ceramide?
- Hoe zijn dieren en planten vergelijkbaar?
- Wat gebeurt er met plantaardige en dierlijke cellen wanneer ze worden geplaatst in hypertone, hypotone en isotone omgevingen?
- Staten willen internetrelease van 3D-geprinte wapenplannen stoppen

- Supercomputing onder een nieuwe lens:een door Sandia ontwikkelde benchmark herrangschikt topcomputers

- Seksuele subculturen zijn bijkomende schade in Tumblrs-verbod op inhoud voor volwassenen

- Microgrids kunnen helpen de efficiëntie van het verbruik van hernieuwbare energie te maximaliseren

- Vakbonden juichen mobilisatie toe in ongekende Ryanair-staking


 Hoe de aarde warmte afgeeft aan de ruimte
Hoe de aarde warmte afgeeft aan de ruimte- Met Comcast-afstandsbediening kunnen mensen met een lichamelijke handicap de tv met hun ogen bedienen
- Q&A:Achter de schermen met een aardbevingswetenschapper
- Homo naledi en Australopithecus sediba worden tentoongesteld in Perot Museum
- Lift berekenen voor rotorbladen
- Nieuwe lichtgewicht, draagbaar robotpak om de loop- en loopprestaties te verbeteren
- Hoe eetbare Bolete-paddenstoelen te identificeren
- Kan de wetenschap haar plasticverslaving doorbreken?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
