Wetenschap
Met een eenvoudige techniek kunnen robots aanraking en nabijheid herkennen
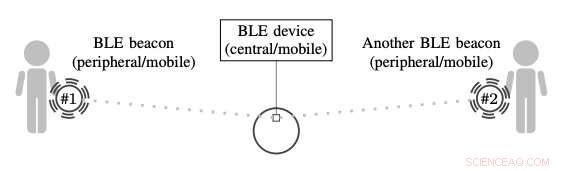
Deze figuur toont de algemene experimentele opstelling. Een centraal BLE-apparaat wordt gebruikt om passief te scannen op advertenties van BLE-randapparatuur. Mensen kunnen worden uitgerust met een of meer BLE-apparaten voor advertenties. Het centrale apparaat berekent pakketten met RSS-gegevens en de ID van ontvangen advertenties. Deze pakketten worden geleverd via een bekabelde verbinding met een ander systeem op het bord van de robot of draadloos via een Bluetooth-verbinding met een andere machine. Omdat de onderzoekers geen toegang hebben tot het bord van de robot, ze gebruikten de bluetooth-verbinding die extra latentie opleverde. Krediet:Scheunemann et al.
Onderzoekers van de Universiteit van Hertfordshire hebben onlangs een eenvoudige en configureerbare techniek voorgesteld die het vermogen van een robot om mensen in zijn omgeving waar te nemen en ermee om te gaan, verbetert. Hun techniek, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, maakt gebruik van betaalbare Bluetooth low energy (BLE) apparaten. Onder de vele mogelijke toepassingen, het zou de therapie voor kinderen met een autismespectrumstoornis (ASS) kunnen verbeteren, robots laten optreden als bemiddelaar en toezicht houden op kinderen in hun omgeving.
"Ik ben geïnteresseerd in robots die volledig autonoom kunnen interageren zonder externe controle en zonder een externe computer, "Marcus M. Scheunemann, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Ik begon mijn werk aan de Universiteit van Hertfordshire om robots te ontwikkelen die bemiddelaars kunnen zijn tijdens therapie voor kinderen met autisme."
Het ontwikkelen van robots die de nabijheid van en tussen kinderen nauwkeurig kunnen herkennen, is een behoorlijk uitdagende taak. Dit komt omdat kinderen over het algemeen vrij spontaan zijn in hun besluitvormingsprocessen, Vandaar, ze kunnen veel bewegen en voortdurend hun interactiestijlen veranderen. Dit maakt het voor robots moeilijker om kinderen te volgen met behulp van traditionele methoden zoals camera's of sensoren, vooral als een robot mobiel is en weinig rekenkracht heeft.
De meeste externe tracking-apparaten die nabijheidsinformatie aan robots doorgeven, hebben ten minste drie markeringen nodig om op kinderen te kunnen worden geplaatst. In aanvulling, om correct te kunnen werken, moeten ze aan de buitenkant worden gedragen en te allen tijde permanent zichtbaar zijn.
Hoewel de informatie die door veel bestaande volgapparatuur wordt verstrekt doorgaans nauwkeurig is, deze apparaten kunnen moeilijk zijn toe te passen op kinderen en beperken hun bewegingen doorgaans tot een enkele uitgeruste kamer. Om de beperkingen van bestaande methoden te overwinnen, Scheunemann en zijn collega's ontwikkelden een nieuwe techniek waarmee robots aanraking en nabijheid van andere mensen kunnen herkennen met behulp van BLE-apparaten.
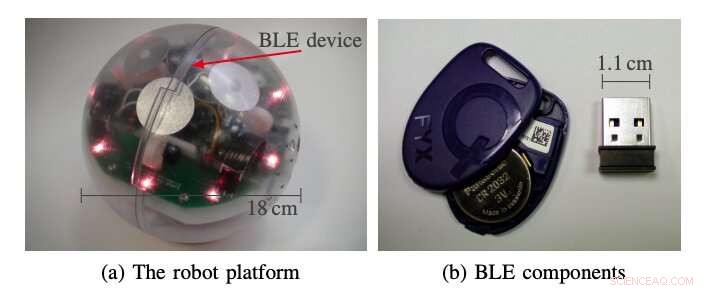
(a) Het mobiele robotplatform QueBall kan heen en weer bewegen en naar links/rechts kantelen. Het kan ook geluid en kleuren uitzenden en detecteert aanraking. De onderzoekers hebben deze robot niet ontwikkeld; ze gebruikten het alleen als voorbeeld. (b) Een zelfaangedreven en configureerbaar reclamebaken dat bedoeld is om aan mensen te worden bevestigd (links) en een centraal Bluetooth-apparaat, of BLE-scanner, dat wil zeggen dat de robot zijn omgeving kan scannen op de sterkte van perifere signalen (rechts). Krediet:Scheunemann et al.
"Het gebruik van BLE is een betaalbare manier om de problemen van bestaande trackingtechnieken te omzeilen, "Zei Scheunemann. "Als een kind minstens één BLE-baken draagt, een robot kan de signaalsterkte meten en kennis afleiden over welk kind op een bepaald moment interactie heeft of wanneer het wordt aangeraakt. De bakens kunnen zo groot zijn als een knoopcelbatterij en kunnen in kleding of petten worden geplaatst, zonder van buitenaf zichtbaar te zijn, in tegenstelling tot externe volgapparatuur."
De techniek van Scheunemann en zijn collega's vereist geen camera en kan aan boord alle informatie snel berekenen. In aanvulling, in tegenstelling tot andere volgapparatuur, de BLE-apparaten die door de onderzoekers worden gebruikt, zijn goedkoop en kunnen gemakkelijk van de plank worden gekocht.
Om hun techniek te testen, de onderzoekers voerden drie proof-of-concept-experimenten uit in een lawaaierige laboratoriumomgeving met behulp van een mobiele bolvormige robot genaamd QueBall. Eerst, ze gebruikten hun techniek om het vermogen van de robot om informatie af te leiden met betrekking tot de nabijheid van individuen in zijn omgeving te verbeteren.
In een tweede experiment, Scheunemann en zijn collega's gebruikten de BLE-apparaten als aanraaksensoren, waardoor QueBall kan herkennen wanneer het werd aangeraakt. Eindelijk, ze gebruikten hun techniek om de robot in staat te stellen onderscheid te maken tussen verschillende op elkaar inwerkende individuen.
"De door ons voorgestelde techniek maakt het eenvoudig om een robot te hebben als bemiddelaar voor autistische kindertherapie, "Zei Scheunemann. "Met onze methode, een robot kan nabijheidsinformatie over een bepaald kind afleiden, zonder de noodzaak om een camera te kalibreren voor de omgeving of voor veranderingen in de omgeving. Deze technologie kan ook worden geschaald voor andere scenario's voor interactie tussen mens en robot, waarbij informatie over de nabijheid van een mens nodig is."
In hun evaluaties Scheunemann en zijn collega's ontdekten dat het observeren van de onbewerkte ontvangen signaalsterkte (RSS) tussen verschillende BLE-apparaten de interacties van een robot met mensen aanzienlijk verbeterde. In de toekomst, hun techniek zou meer adaptief gedrag kunnen bevorderen bij robots die in verschillende omgevingen werken. Bijvoorbeeld, het zou de inzet van robots als therapiebemiddelaars voor kinderen met ASS kunnen vergemakkelijken.
"In ons toekomstige werk, we zijn van plan deze technologie te gebruiken om robots uit te rusten met BLE-scanners, zodat ze gemakkelijk informatie kunnen afleiden met betrekking tot de nabijheid van en tussen interagerende mensen."
© 2019 Wetenschap X Netwerk
 Een nieuwe L-fucose metabolische route van strikt anaërobe en pathogene bacteriën
Een nieuwe L-fucose metabolische route van strikt anaërobe en pathogene bacteriën- NIST pH-standaardreferentiematerialen ondersteunen een van de meest gemeten eigenschappen van de productie
- De detectie van een date rape drug verbeteren
- Wanneer Starfish op het strand halen?
- Zelfherstellende katalysatorfilms voor waterstofproductie
- Effecten van weersvariabiliteit op de productie van ahornsiroop bestudeerd
- Eenzaamste boom ter wereld markeert nieuw tijdperk voor onze planeet
- Duurzame landbouw:opbrengst garanderen en broeikasgassen verminderen
- Onderzoek wijst op kwetsbaarheid landelijke kust voor zeespiegelstijging
- Hoe de Noordelijke IJszee zout werd
Hoofdlijnen
- Commensalisme:ik profiteer,
- Onderzoekers verwachten dat nieuwe vispassage de trekvispopulaties zal herstellen
- Slangenmans gifgewoonte houdt hoop op nieuw tegengif
- Hoe groeit schimmel op voedsel?
- Onverwachte vondst lost 40 jaar oud cytoskeletmysterie op
- Wat gebeurt er met cellen vanwege een natriumbalans?
- Onderzoeker onthult hoe kevers terugveren van bosbranden
- Hoe chromosomen vals spelen om kans te maken in een ei te komen
- Coevolution: definitie, soorten en voorbeelden
- Geschikt om te rijden? De auto zal oordelen

- Embatttled Noble Group voltooit revisie van $ 3,5 miljard

- Weer een exec uit te midden van seksuele intimidatie bij Google

- Amerikaans bureau is van plan om de veiligheidsclassificaties voor auto's volgend jaar bij te werken

- Homomorfe encryptie voor cloudgebruikers


 Innovatieve microscoop klaar om optogenetische studies voort te stuwen
Innovatieve microscoop klaar om optogenetische studies voort te stuwen- Decodering van de sedimentgeschiedenis van Lake Matoakas van het antropoceen
- Star Treks Kobayashi Maru Oefening verkent situaties zonder winstoogmerk
- de dodelijke, levengevende en voorbijgaande elementen die deel uitmaken van groep 15 van het periodiek systeem
- Californiërs zijn het erover eens:bouw niet in gebieden die gevoelig zijn voor natuurbranden
- NASA observeert de vorming van tropische storm Aletta
- Het veronderstelde gemiddelde bepalen
- Op zoek naar tekenen van de eerste sterren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
