Wetenschap
Kickcontrole implementeren op gesimuleerde en echte robots op wielen
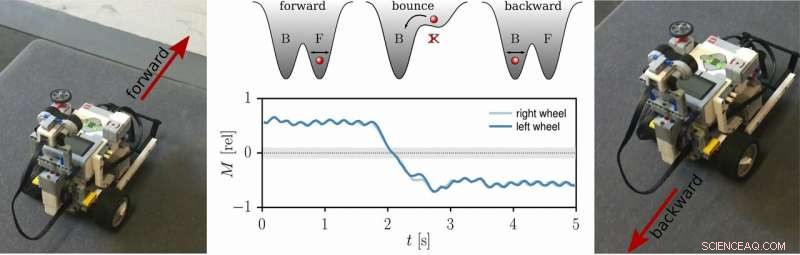
Afbeelding van hoe de robot autonoom de bewegingsrichting verandert bij het raken van een muur. Krediet:Sandor et al.
Een team van onderzoekers van Babes-Bolyai University, in Roemenië, en Goethe University Frankfurt hebben onlangs samengewerkt aan een onderzoek naar implementaties van trapbesturing op zowel gesimuleerde als echte robots op wielen. De term 'kick control' verwijst naar korte, commando's van hogere orde die kunnen worden gebruikt om een systeem van de ene zelfgeorganiseerde attractor in het aantrekkingsgebied van een andere attractor te 'schoppen'.
"Als we verhuizen, reageren onze spieren alleen op de signalen die de hersenen sturen, of houden ze ook rekening met de toestand van de gewrichten, van de pezen en van de spieren zelf?" vroeg Claudius Gros, een van de onderzoekers die het onderzoek heeft uitgevoerd. "Men spreekt van 'belichaamde voortbeweging, ' als het laatste het geval is. Ons onderzoek is erop gericht om te onderzoeken hoe belichaming dieren en robots helpt om door de wereld te navigeren."
In de natuur, zelfs dieren met een eenvoudig zenuwstelsel kunnen door een verscheidenheid aan complexe omgevingen navigeren. Om door zowel bekende als onbekende omgevingen te bewegen, robots moeten vergelijkbare sensomotorische vaardigheden hebben. Tot dusver, echter, Wetenschappers en ingenieurs over de hele wereld hebben geworsteld om robots te ontwerpen met motorische capaciteiten die lijken op die van mens en dier.
"Het coördineren van een groot aantal actuatoren in een continu veranderende omgeving is zeker een uitdagende taak, " Bulcsú Sándor, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "Dus waarom laten we het lichaam van de robot niet het harde werk doen, door een substantieel deel van de berekening over te nemen? Naar aanleiding van dit idee, we stellen een alternatief controleschema voor waarin bewegingspatronen op een zelfgeorganiseerde manier worden gegenereerd. In dit kader is voortbeweging wordt gecreëerd via een dynamische interactie tussen de hersenen en het lichaam van de robot, en het milieu."
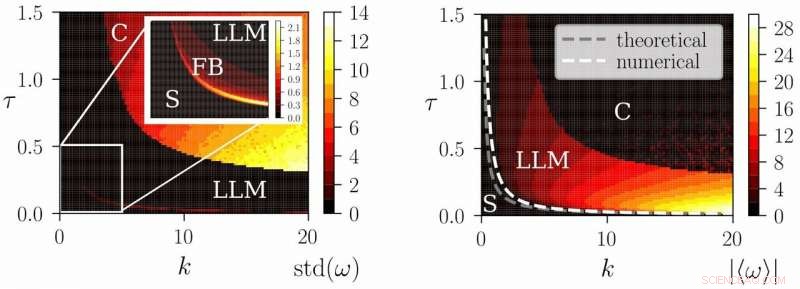
Fasediagram van het systeem:dynamisch gedrag als functie van de parameters van de regelaar.
Sandor, Gros en hun collega's bedachten een controller-framework waarin bewegingen niet rigide zijn gedefinieerd, maar worden eerder beschreven door een reeks vergelijkingen voor het besturen van actuatoren die dynamisch veranderen, het opnemen van de proprio-sensorische informatie van het lichaam. Vervolgens hebben ze deze vergelijkingen getest en verfijnd in de LPZRobots-simulatieomgeving.
"Door de interactie van de robot met zijn omgeving, verschillende zelfgeorganiseerde bewegingspatronen kunnen worden gecreëerd, "Sándor zei. "Dit stelt ons in staat om te schakelen tussen deze gedragsprimitieven door een goed gedefinieerd kick-achtig stuursignaal. Dit noemen we 'kick control'. Eindelijk, als proof-of-concept, we hebben dit idee geïmplementeerd op echte robots op wielen."
Het coördineren van de samentrekking van de vele spieren in het lichaam is een zeer uitdagende taak, die van nature door de meeste mensen en dieren wordt verworven. In hun studie hebben Sandor, Gros en hun collega's probeerden een eenvoudigere methode te bedenken om motorische vaardigheden bij te brengen bij robots.
-
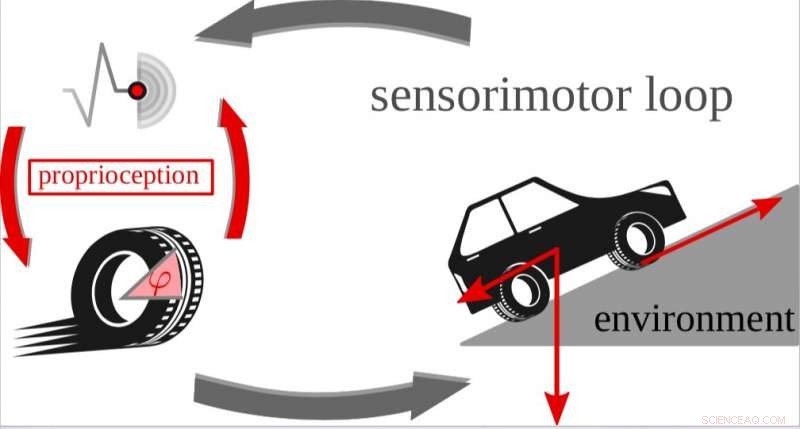
Schets van een conforme sensomotorische lus, kunnen aanpassen aan de omgeving. Krediet:Sandor et al.
-
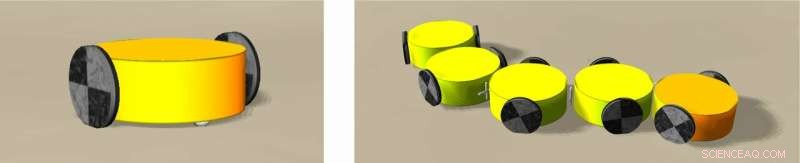
Gesimuleerde robots (één auto, 5 auto's aangesloten op een trein). Krediet:Sandor et al.
-
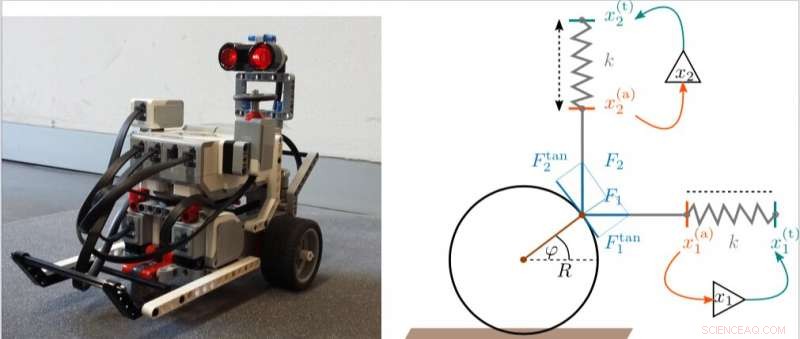
Lego-robot en het besturingsmechanisme dat we gebruikten. Krediet:Sandor et al.
-
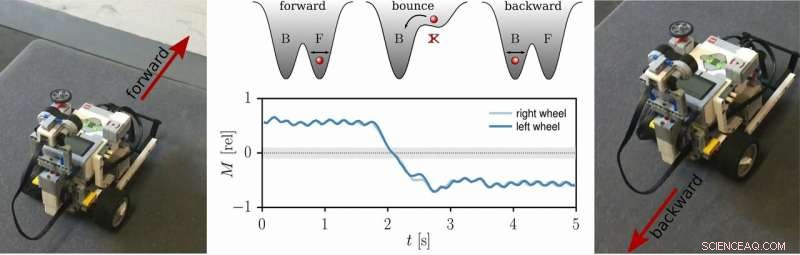
Afbeelding van hoe de robot autonoom de bewegingsrichting verandert bij het raken van een muur. Krediet:Sandor et al.
"Zou het niet veel eenvoudiger zijn als de hersenen gewoon een kort schopsignaal zouden geven en het lichaam van een dier of robot zelf een goed gecoördineerde beweging zou uitvoeren?" zei Gros. "Dit is het belangrijkste idee achter kick control. Het kan worden gerealiseerd, zoals we ontdekten, wanneer de robot beschikt over zelfgeorganiseerde actuatoren."
De onderzoekers evalueerden hun raamwerk op zowel gesimuleerde als echte robots op wielen, het onafhankelijk genereren van de dynamiek van verschillende wielen via lokale feedbackloops. Deze feedbackloops worden gemedieerd door snelheidscoderende neuronen, die propriosensorische inputs verwerken die de werkelijke rotatiehoek van elk wiel beschrijven. Vervolgens, een gesimuleerde transmissiestaaf die lijkt op die van stoomlocomotieven, vertaalt veranderingen in neurale activiteit in een roterende beweging.
"We laten zien hoe zelfgeorganiseerde bewegingspatronen kunnen worden gebruikt om belichaamde voortbeweging te genereren, "Sándor zei. "Het gebruik van dit controleschema kan helpen om complexe berekeningen te vereenvoudigen die moeten worden uitgevoerd om verschillende voortbewegingstaken uit te voeren. De combinatie met andere methoden kan leiden tot krachtige tools voor het genereren van complex robotgedrag. Ons raamwerk zou ook kunnen bijdragen aan het begrip van de voortbeweging van dieren en mensen."
Het onderzoek van Sándor, Gros en hun collega's zouden kunnen leiden tot een nieuwe techniek om de bewegingen van robots efficiënt aan te sturen. Het belangrijkste praktische voordeel van hun raamwerk is dat het een deel van de rekenbelasting toewijst aan het lichaam van de robot. Hun model zou ook kunnen worden gebruikt om dynamische systemen te onderwijzen in natuurkundecursussen op de middelbare school, omdat het interactieve en boeiende demonstraties mogelijk maakt.
De onderzoekers zijn nu van plan hun algoritmen te testen op complexere robotica-architecturen, het opnemen van verschillende zintuiglijke modaliteiten in hun vergelijkingen. Bijvoorbeeld, ze zouden kick-control kunnen toepassen op een hiërarchische organisatie van controllers, waarin visuele informatie een bepaalde voortbewegingsmodus activeert.
"We werken momenteel aan het veralgemenen van onze principes naar legged robots, in het bijzonder hexapoden, en onze eerste resultaten zijn veelbelovend, " zei Gros. "We onderzoeken ook de activering van kickcontrole door sensorische informatie."
© 2019 Wetenschap X Netwerk
 Nieuwe interactie tussen dunne-filmmagneten voor snellere geheugenapparaten
Nieuwe interactie tussen dunne-filmmagneten voor snellere geheugenapparaten- Team ontdekt een mechanisme dat planten gebruiken om fotosynthese in te schakelen
- Van het laboratorium, de eerste kraakbeen-nabootsende gel die sterk genoeg is voor knieën
- Organisch afval gebruiken om bodemverontreiniging door zware metalen tegen te gaan
- Een kleverig onderwerp:schelpdieren bestuderen voor geavanceerde lijmen
- Zou de bosbrandcrisis het keerpunt kunnen zijn in de klimaatpolitiek die Australië nodig heeft?
- Wat zijn de agenten van verwering?
- Opwarming van de aarde:meer insecten, meer gewassen eten
- Laserscanning vanuit de lucht van gaten in het Amazone-regenwoud verklaart boomsterfte
- Herwaardering van strategieën om het fosforgehalte in het stroomgebied van de Detroit-rivier te verlagen
Hoofdlijnen
- Waar vindt ademhaling plaats?
- Hartmonitors op wilde narwallen onthullen alarmerende reacties op stress
- Hoe overtuigend is een Y-chromosoomprofielmatch tussen verdachte en plaats delict?
- Virtual reality voor bacteriën
- Een stap dichter bij gewassen met twee keer de opbrengst
- Hoe beïnvloedt CO2 de opening van de huidmondjes?
- Feiten over Prokaryotic
- Onderzoekswetenschappers ontdekken nieuwe productieroute voor SOS-signalen van planten
- Hoe werkt een DP-cel?
- Disney neemt hindernis voor samenwerking met Fox met goedkeuring van Amerikaanse toezichthouder (update)

- Uber sluit zich aan bij scooteroorlogen met Lime-investering

- Veilige en effectieve brandbestrijding aan boord

- Microsoft aan contractanten:geef nieuwe ouders betaald verlof

- Machine learning gebruiken om overtuigende gezichten voor advertenties te genereren


 Zetmeel kan normaal plastic in voedselverpakkingen vervangen
Zetmeel kan normaal plastic in voedselverpakkingen vervangen- Draagbare kankertest maakt gebruik van smartphone, nieuwe gouden biosensor
- Het effect van temperatuur op celmembranen
- Verandert de dichtheid van een vluchtige vloeistof met verdamping?
- Voorspelling orkaan in de Stille Oceaan gecompliceerd door coronavirus
- Europa zindert in hittegolf terwijl bosbrand Portugal treft (update)
- Nanopapier filter verwijdert virussen
- Afbeelding:ESA's Cheops-satelliet
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
