Wetenschap
Sommige robots lopen. Anderen vliegen. Hij heeft er een gebouwd die beide kan.
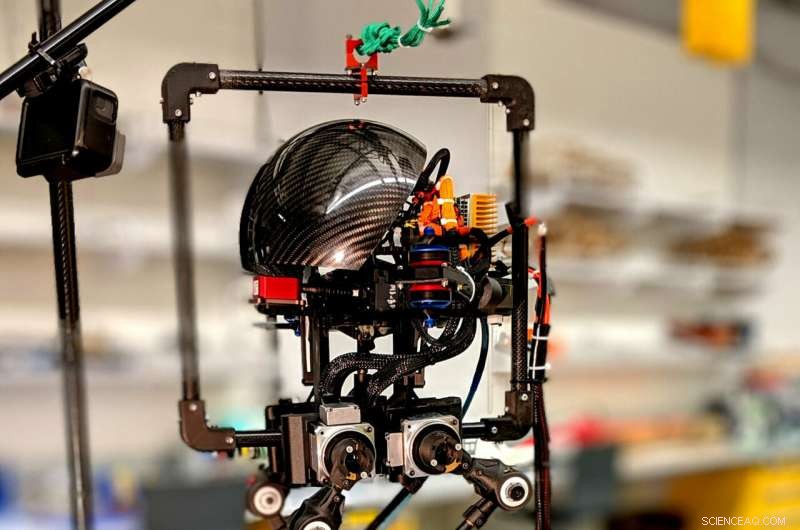
Leo staat ongeveer twee en een halve voet lang, op dun, gebogen benen. Krediet:Alireza Ramezani, Binnenkort-Jo Chung, en Morteza Gharib
Een tweevoetige robot loopt op het oppervlak van een verre planeet. Zijn sensoren scannen de omgeving, gegevens terugsturen naar de aarde. Het komt tot een afbrokkelende heuvel, buigt zijn knieën en springt, stuwraketten zoemend, om veilig boven de losse rots te landen.
Deze toekomst is nog een verre droom ver weg, maar Alireza Ramezani, een assistent-professor elektrische en computertechniek aan Northeastern, heeft het met zijn nieuwe robot een stap dichterbij gebracht.
De robot staat bekend als LEONARDO, een acroniem voor LEg ON Aerial Robotic DrOne, of kortweg Leeuw. Het heeft een vermogen dat de meeste robots tegenwoordig niet hebben:het kan zowel lopen als vliegen.
"In eerste instantie het is ontwikkeld met het idee om ontdekkingsreizigers te ontwerpen - systemen die beenmobiliteit en snelle luchtmobiliteit kunnen combineren om autonome verkenningen te doen, ' zei Ramezani.
Leo staat ongeveer twee en een halve voet lang, op dun, gebogen benen. Met een lichaam dat voornamelijk is gemaakt van koolstofvezel, de robot is sterk, maar weegt slechts zes pond. Het heeft stuwraketten aan weerszijden van wat Ramezani de romp noemt. Deze kunnen stuwkracht in beide richtingen leveren, en zijn krachtig genoeg om te vliegen. Maar dat is niet hun primaire functie.
"Het idee is niet om een quadcopter te maken, "Zei Ramezani. "Het idee is om een machine te hebben die zijn benen en stuwraketten kan gebruiken om, bijvoorbeeld, zijn springvermogen verbeteren."
De stuwraketten kunnen ook helpen de robot te stabiliseren op oneffen oppervlakken, of vang het als het begint te vallen.
"Dit is de grote uitdaging voor legged systemen, of zelfs mensen:we kunnen ons lichaam stabiliseren, maar soms vallen we, "Zei Ramezani. "Wat als we een robot zouden kunnen hebben die nooit valt?"
Ramezani begon robotsystemen met poten te bestuderen tijdens zijn afstudeerwerk aan de Universiteit van Michigan. Lopende robots hebben het vaak moeilijk op ruw terrein. Destijds, hij vroeg zich af of er een manier was om een airbag te activeren om een vallende robot op te vangen. Nu heeft hij een robot ontworpen die zichzelf kan opvangen.
Het idee kwam van het kijken naar vogels, zei Ramezani. De meeste robotontwerpen richten zich uitsluitend op één type voortbeweging, maar vogels kunnen lopen, vlieg, en zelfs rennen.
"In de natuur zie je techniek tot in de perfectie, en we kunnen veel leren, " zei Ramezani, die ook een vliegende robot heeft gebouwd op basis van luchtacrobatiek van vleermuizen. "Dat is voor mij een inspiratie geweest in bijna al mijn ontwerpen."
Toen Ramezani zich afgelopen herfst bij Northeastern aansloot, Leo bleef achter bij het California Institute of Technology, waar Ramezani een postdoctoraal onderzoeker was geweest. Hij is van plan een bijgewerkte versie van de robot te bouwen in Boston, voor Noordoost-studenten om te gebruiken als leerplatform.
"In dit stadium Ik beschouw dit als een zeer goed platform om agile robotica te pushen. Denk aan een robot die letterlijk nooit valt:hij kan over ruw terrein, het kan vliegen, Het kan springen. Een uiterst capabel systeem, ' zei Ramezani. 'Onderweg, we kunnen een machine als deze gebruiken voor verkenning."
 Ontdekking verhoogt de mogelijkheid om neurologische aandoeningen te behandelen
Ontdekking verhoogt de mogelijkheid om neurologische aandoeningen te behandelen- Hoe verhouden een elementen Valence-elektronen zich tot hun groep in het periodiek systeem?
- Samenwerking leidt tot ontdekking van 2D-polymeer
- Afstemmen op de LCD's van morgen:de nieuwe IGZO-11 halfgeleider verkennen
- Studie vindt fluor als mogelijke vervanging voor lithium in oplaadbare batterijen
- Lijst met Antarctica Animals
- UITLEG:Grote gevaren in het verschiet voor Spaans vulkanisch eiland
- Palmoliereus nog steeds gelinkt aan houtkap in Indonesië:Greenpeace
- Megathrust-aardbevingen opschudden met langzame slip en vloeistofafvoer
- Studie vindt manieren om verborgen gevaren van geaccumuleerde spanningen op zeegras te vermijden
Hoofdlijnen
- Hoe doorlatendheid te berekenen
- De effecten van algen in drinkwater
- Nieuwe interactieve technologie maakt zeldzame celtypes zichtbaar
- Puin van de tsunami van 2011 bracht honderden soorten over de Stille Oceaan
- Erfelijkheid: definitie, factor, soorten en voorbeelden
- Microbiologie vs. Biochemie
- Geen hondenleven voor oudere dieren in Singapore Zoo
- Metafase: wat gebeurt er in dit stadium van mitose en meiose?
- De levenscyclus van Gymnosperms
- Silicon Valley wint de race om de eerste auto's zonder bestuurder te bouwen

- Stereovisie met behulp van computerarchitectuur geïnspireerd door de hersenen

- Niet-lineariteit aanpassen met tijddomeinmeta-oppervlak voor draadloze communicatie

- Amazon biedt op 60% belang in Indias Flipkart:rapport

- Hoe Google, Facebook zal zich aanpassen aan de nieuwe privacywet van Europa


 Studie vraagt waarom studenten die meer te winnen hebben bij handvestscholen, minder snel een aanvraag indienen
Studie vraagt waarom studenten die meer te winnen hebben bij handvestscholen, minder snel een aanvraag indienen- Wat is een constant in een Science Fair-project?
- Kosmische explosie neemt eindelijk rust
- Ethisch dilemma? Vrouwen in de PR zijn meer geneigd om bondgenoten te zoeken voordat ze advies geven aan leidinggevenden
- Italiaanse piloten keuren deal met Ryanair goed
- Natuurlijke bronnen van warmte Energie
- Het is meer dan alleen klimaatverandering
- Alaska-toendra bron van koolstofemissies in de vroege winter (update)
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
