Wetenschap
Een end-to-end imitatieleersysteem voor snelheidsregeling van autonome voertuigen
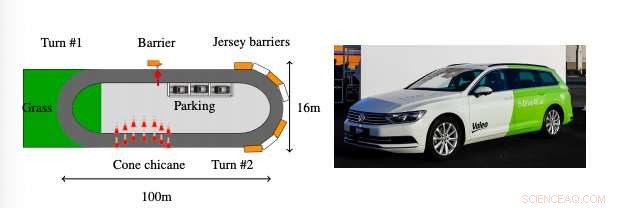
Testbaan (links) en demonstratieauto gebruikt (rechts). Krediet:Wirbel et al.
Onderzoekers van Valeo, een technologiebedrijf gespecialiseerd in auto-innovatie, hebben onlangs een end-to-end leersysteem voor imitatie van auto's ontwikkeld. Hun aanpak, geschetst in een paper dat vooraf is gepubliceerd op arXiv, maakt gebruik van een neuraal netwerk met lange korte termijn geheugen (LSTM), een type terugkerend neuraal netwerk (RNN) dat langdurige afhankelijkheden kan leren.
"Valeo is de wereldleider in sensoren, de oren en ogen van zelfrijdende auto's, en heeft al verschillende wereldprimeurs behaald, zoals de recente experimenten met ons Valeo Drive4U-voertuig, de eerste autonome auto die in de straten van Parijs werd gedemonstreerd, "Emilie Wirbel, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Mijn team en ik werken in een van de 56 onderzoeks- en ontwikkelingscentra van het bedrijf, onderzoeken hoe deep learning kan worden gebruikt om betere beslissingen en controle over autonome auto's te krijgen. Het doel van dit onderzoek was om te bewijzen dat het mogelijk is om te gaan met complexe situaties die zich in stedelijke omgevingen kunnen voordoen door alleen camera's te gebruiken en te leren van wat een menselijke bestuurder kan doen."
Het nieuwe systeem dat door Wirbel en haar collega's is ontwikkeld, maakt gebruik van een kunstmatig neuraal netwerk (ANN) dat gebaseerd is op deep learning-technieken. Het netwerk wordt gevoed met demonstraties van een mens die een auto bestuurt die zijn genomen met een camera aan de voorkant en dus sterk lijken op wat de persoon zag tijdens het rijden.
Het neurale netwerk wordt vervolgens getraind om de handelingen van de bestuurder te imiteren, met name gericht op het reproduceren van de huidige snelheid van de auto. Bijvoorbeeld, wanneer een invoerbeeld een snelheidslimietpaneel van 50 km/u bevat, het netwerk zorgt ervoor dat de auto niet harder gaat dan 50 km/u.
"Als er een andere auto voor ons staat, een menselijke bestuurder zal dienovereenkomstig vertragen en het netwerk zou moeten leren hetzelfde te doen, " legde Wirbel uit. "Onze aanpak probeert na te bootsen hoe een mens leert en rijdt. Het netwerk ontvangt alleen informatie van de frontale camera en heeft geen expliciete waarneming nodig, bijvoorbeeld, verband houden met de verkeerslichten of de rijstroken, net zoals een menselijke bestuurder geen expliciet model heeft van waar de lijnen precies zijn en wat hun vorm is."
Na het trainen van hun neurale netwerk, Wirbel en haar collega's testten het in een simulatieomgeving en integreerden het vervolgens in een echte auto, het evalueren van zijn prestaties op een uitdagende testbaan. Ze ontdekten dat hun systeem effectief reageerde op complexe situaties, het regelen van de snelheid van de auto waar nodig (bijv. afremmen bij verkeerskegels en scherpe bochten, stoppen bij slagbomen en bij het naderen van waarschuwingsborden, enzovoort.).
"Onze studie bewijst dat complexe situaties, zoals werkzones, onverwachte obstakels, enzovoort., kan worden aangepakt door simpelweg te observeren wat een mens zou doen en dit vervolgens te reproduceren in nieuwe, soortgelijke situaties, "Zei Wirbel. "Dit betekent dat zolang we genoeg demonstratiegegevens hebben, we kunnen gebruikssituaties aan waarmee menselijke bestuurders redelijkerwijs zouden kunnen omgaan. Dit zou kunnen worden gebruikt in complexe interactiesituaties in combinatie met de meer klassieke benaderingen, om het voertuig consistent en slim te laten reageren."
Het door Wirbel en haar collega's bedachte systeem heeft veelbelovende resultaten opgeleverd en kan binnenkort worden toegepast op autonome voertuigen, wat leidt tot een effectievere snelheidsregeling en intuïtiever rijden. De onderzoekers zijn van plan hun proof of concept uit te breiden naar meer complexe situaties, hun systeem leren omgaan met een grotere verscheidenheid aan interacties met andere voertuigen op de weg, evenals het toevoegen van meer complexe manoeuvres, zoals het wisselen van rijstrook, draaien op kruispunten, of het navigeren op rotondes.
"We willen ook werken aan de verklaarbaarheid en compatibiliteit van het systeem met bestaande autonome voertuigen, de eindgebruiker uitleggen hoe het netwerk zijn omgeving waarneemt en waarom het zijn beslissingen neemt, " voegde Wirbel toe. "De onderzoeksroutekaart is erg breed, daarom wonen en dragen we bij aan grote wetenschappelijke conferenties om op de hoogte te blijven van de laatste stand van zaken op dit gebied. Onze rol als R&D-team is ook om de rest van Valeo te voorzien van de juiste sleutels en expertise om onze proofs of concept dichter bij de productie te brengen."
© 2019 Wetenschap X Netwerk
 Wat is een oplosmiddel?
Wat is een oplosmiddel? - Machine learning-benadering kan helpen bij het ontwerpen van industriële processen voor de productie van geneesmiddelen
- Wat zijn voorbeelden van een toename van entropie?
- Smartphonelab levert testresultaten in een oogwenk
- Polymeerkristallen vormen de sleutel tot recordbrekend energietransport
Hoofdlijnen
- Hoe wordt recombinant DNA gemaakt?
- Waarom is het zo moeilijk voor soorten om hun ecologische niche te verlaten?
- Een plantencelmodel maken met een schoenendoos
- Hoe een eenvoudige microscoop te maken
- Heb jij een innerlijke stem? Niet iedereen doet
- Krillgedrag brengt koolstof naar de diepten van de oceaan
- Hoe menselijk zijn mensen? Nieuwe studie suggereert ongeveer 7 procent
- Nieuwe tool kan helpen de kwaliteit te behouden tijdens de kaasproductie
- Wat zou er gebeuren als een cel geen ribosomen zou hebben?
- Facebook zegt dat de functie voor het wissen van de geschiedenis dit jaar klaar is

- Hoe ziet internet eruit? Een meerlagig grafiekmodel van de internettopologie

- Oprah Winfrey gaat shows voor Apple produceren

- Snellaadsysteem voor E-bikes

- Nieuwe methode om de energie-efficiëntie van hele wijken in te schatten


 Bias berekenen
Bias berekenen - Gecontroleerde faagtherapie kan zich richten op medicijnresistente bacteriën en tegelijkertijd mogelijke onbedoelde gevolgen omzeilen
- Nieuwe composietkatalysator belooft een kosteneffectieve conversie van ethanol naar vliegtuigbrandstof
- Bevolkingstoename en klimaatverandering wijzen op toekomstige watertekorten in de VS
- Wiskundige regels voor aftrekken
- Waarom wordt de lucht 's nachts donker?
- Hoe stuifmeel werkt
- Jongeren vinden dat er voor hen minder mogelijkheden zijn om aan sport te doen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
