Wetenschap
Ontwikkeling van een prototype van een humanoïde robot, HRP-5P, tot zwaar werk in staat

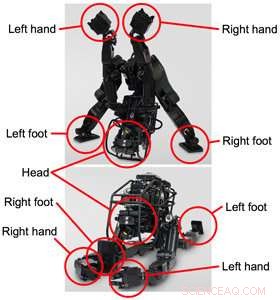
HRP-5P uiterlijk (links) en HRP-5P met een ca. 13 kg plank (rechts). Krediet:geavanceerde industriële wetenschap en technologie
Onderzoekers hebben een prototype van een humanoïde robot ontwikkeld, HRP-5P, bedoeld om autonoom zware arbeid of werkzaamheden in gevaarlijke omgevingen uit te voeren.
Als een 182 cm, 101 kg humanoïde robot, HRP-5P is gebouwd op technologieën uit de HRP-serie door nieuwe hardwaretechnologieën op te nemen. Binnen de serie, het heeft onovertroffen fysieke mogelijkheden. De robotintelligentie omvat omgevingsmeting en objectherkenning, planning en controle van bewegingen van het hele lichaam, taakomschrijving en uitvoeringsbeheer, en zeer betrouwbare systematiseringstechnologieën. Door de intelligentie in dit lichaam te huisvesten, heeft de robot autonome gipsplaatinstallatie mogelijk gemaakt, dat is een typisch voorbeeld van zwaar werk op bouwplaatsen. Het gebruik van HRP-5P, als ontwikkelplatform, belooft in samenwerking tussen de industrie en de academische wereld de R&D te versnellen naar de praktische toepassing van humanoïde robots op bouwplaatsen en bij de assemblage van grote constructies zoals vliegtuigen en schepen.
Figuur 1. Voorover buigen (boven) en met de benen naar voren en naar achteren gespreid (onder). Krediet:geavanceerde industriële wetenschap en technologie
Het dalende geboortecijfer in Japan zal naar verwachting leiden tot ernstige tekorten aan arbeidskrachten in de bouw en vele andere industrieën. Het is absoluut noodzakelijk om dit probleem op te lossen met behulp van robottechnologieën. Deze technologieën bieden ook een aantrekkelijk alternatief voor het hebben van bouwvakkers op bouwplaatsen, vliegtuigfaciliteiten, of scheepswerven zware arbeid verrichten die potentieel gevaarlijk is. Echter, het was moeilijk om deze grootschalige bouwplaatsen geschikt te maken voor robots, die de introductie van robots heeft ontmoedigd. Omdat humanoïde robots fysiek op mensen lijken, ze kunnen werken zonder veranderingen in het milieu, mogelijk het ontlasten van arbeiders van zwaar werk.
Bij de ontwikkeling van de HRP-serie, AIST heeft samengewerkt met verschillende bedrijven uit de particuliere sector, waaronder Kawada Industries Inc. (nu Kawada Robotics Corp.), en heeft basistechnologieën ontwikkeld voor praktische toepassing. HRP-2 was in staat om op twee benen te lopen, liggen, opstaan, lopen op smalle paden, en andere acties. HRP-3 kon op gladde oppervlakken lopen en bouten op bruggen met de afstandsbediening vastdraaien. Ramp-respons humanoïde robotonderzoek aan de gang bij AIST sinds 2011 heeft geleid tot een herziene versie van HRP-2 met verbeterde fysieke mogelijkheden (zoals ledemaatlengte, bewegingsbereik, en gezamenlijke output), die op ruw terrein kunnen lopen, draai kleppen, en andere taken semi-autonoom uitvoeren op basis van 3D-omgevingsmetingen. Echter, de fysieke mogelijkheden waren nog steeds onvoldoende voor zwaar werk, zoals het plaatsen van gipsplaten, en het ontbrak voldoende vrijheidsgraad en voldoende beweegbaar bereik van gewrichten om menselijke beweging in complexe omgevingen na te bootsen. Tegen dit doel, AIST zette de ontwikkeling van de humanoïde robot voort, HRP-5P, met fysieke mogelijkheden waardoor het in de plaats kan komen van mensen die zwaar werk doen.
Verder, HRP-5P erft de technologieën van de HRP-serie en maakt gebruik van gepatenteerde technologie van Honda Motor Co., Ltd.
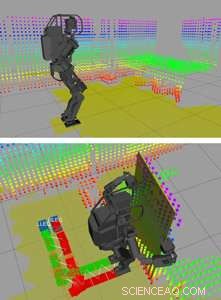
Figuur 2. Plattegrond omgeving (boven) en wandelplan (onder). Krediet:geavanceerde industriële wetenschap en technologie
Een deel van de ontwikkeling van HRP-5P werd ondersteund door R&D in opdracht van de New Energy and Industrial Technology Development Organization (NEDO), "R&D op zeer betrouwbare humanoïde robotsystemen die kunnen werken in ongestructureerde omgevingen" in "autonome humanoïde robots (innovative element robot technologies field)" of "R&D op volgende generatie kernrobottechnologieën, en subsidie voor wetenschappelijk onderzoek van de Japan Society for the Promotion of Science, "Targeting full-body motion planning op basis van omgevingsmodel acquisitie die humanoïde robots in staat stelt zich aan te passen aan onbekende omgevingen" (onderzoeksproject nummer JP17H07391).
Het humanoïde robotprototype HRP-5P is ontwikkeld met een robuust lichaam en geavanceerde intelligentie om autonoom te werken en een alternatieve bron van zwaar werk te bieden.
- Met een hoogte van 182 cm en een gewicht van 101 kg, HRP-5P heeft een lichaam met in totaal 37 vrijheidsgraden:twee in zijn nek, drie in zijn middel, acht in zijn armen, zes in zijn benen, en twee in zijn handen. Behalve de handen, dit vertegenwoordigt de meeste bewegingsvrijheid in de HRP-serie tot nu toe. Vergeleken met de herziene versie van HRP-2, het toevoegen van één graad van vrijheid aan de taille en één aan de basis van de armen heeft operaties mogelijk gemaakt die meer lijken op menselijke bewegingen. Overeenkomstig, beide armen gebruikend, HRP-5P kan grote objecten aan zoals gipsplaten (1820 × 910 × 10 mm, ca. 11 kg) of multiplex panelen (1800 × 900 × 12 mm, ca. 13 kilo).
- Om menselijke beweging door de robot na te bootsen zonder zoveel vrijheidsgraden als mensen, de onderzoekers zorgden voor een breder beweegbaar bereik van gewrichten in de heup- en taillegebieden, waar meerdere gewrichten zijn geconcentreerd. Bijvoorbeeld, heupgewrichten die de benen buigen en strekken, hebben een bewegingsbereik van 140° bij mensen en 202° bij HRP-5P (Fig. 1), en taillegewrichten die het bovenlichaam draaien, hebben een bewegingsbereik van 80° bij mensen en 300° bij HRP-5P. Hierdoor kan de robot in verschillende houdingen werken, zoals wanneer diep gehurkt met het bovenlichaam gedraaid.
- Gezamenlijke koppel en snelheid waren gemiddeld ongeveer verdubbeld ten opzichte van de herziene HRP-2, door gebruik te maken van krachtige motoren, het toevoegen van koeling aan het aandrijfmechanisme, en het toepassen van een gezamenlijk aandrijfsysteem met bepaalde verbindingen met meerdere motoren. Als resultaat, de robot kan werken met zware lasten, zoals het optillen van een gipsplaat van een stapel. (Elke arm van HRP-5P, horizontaal verlengd, kan een gewicht van 2,9 kg dragen, vergeleken met 1,3 kg voor de herziene versie van HRP-2 en 0,9 kg voor HRP-4.)
- Met behulp van op het hoofd gemonteerde sensoren, de robot verwerft voortdurend 3D-metingen van de omgeving (met een frequentie van 0,3 Hz). Zelfs als het gezichtsveld wordt geblokkeerd door objecten die in het werk worden gebruikt, opgeslagen en bijgewerkte meetresultaten maken het mogelijk om het loopplan uit te voeren terwijl u een paneel draagt of om het lopen te corrigeren wanneer de voeten wegglijden. (Figuur 2).
- Leren omvat een convolutioneel neuraal netwerk met behulp van een nieuw geconstrueerde beelddatabase van werkobjecten. De robot kan tien soorten 2D-objectgebieden detecteren met een hoge precisie van 90% of meer, zelfs tegen achtergronden met weinig contrast of bij weinig licht (Fig. 3).
- Het was mogelijk om een zeer betrouwbaar robotsysteem te bouwen en de kwaliteit van grootschalige software te behouden (met ca. 250, 000 regels code) door een virtuele testomgeving voor de robotintelligentie in de Choreonoid-robotsimulator in te richten en softwareregressie gedurende 24 uur te bewaken.
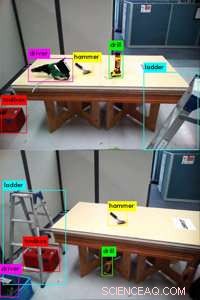
Figuur 3. Voorbeeld van objectdetectie. Krediet:geavanceerde industriële wetenschap en technologie
De integratie van deze technologieën heeft een autonome installatie van gipsplaten mogelijk gemaakt waarbij HRP-5P grote, heavy objects at a simulated residential construction site independently.
specifiek, this work involves the following series of operations.
- Generate a 3-D map of the surrounding environment, detect objects, and approach the workbench.
- Lean against the workbench, slide one of the stacked gypsum boards to separate it, and then lift it.
- While recognizing the surrounding environment, carry the gypsum board to the wall.
- Lower the gypsum board and stand it against the wall.
- Using high-precision AR markers, recognize and pick up a tool.
- Holding a furring strip to keep HRP-5P itself steady, screw the gypsum board into the wall.
R&D on robot intelligence will be promoted using this platform, targeting an alternative source of autonomous manual labor at residential or office building sites, and in assembly of large structures such as aircraft and ships. This will compensate for labor shortages, free people from heavy labor, and help them focus on more high-value-added work.
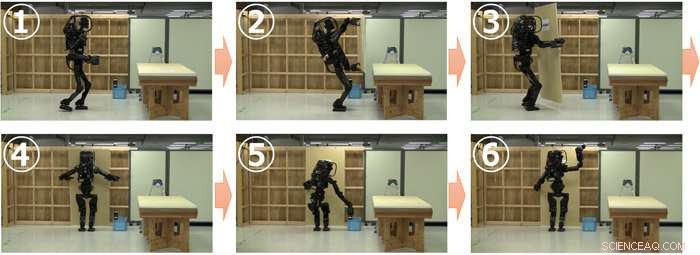
Figure 4. Autonomous gypsum board installation by HRP-5P. Credit:Advanced Industrial Science and Technology
 Nieuwe methode van warmtegeleiding kan een game changer zijn voor serverparken en vliegtuigen
Nieuwe methode van warmtegeleiding kan een game changer zijn voor serverparken en vliegtuigen- Wetenschappers kijken naar vetmetabolisme in levende vissen, observeer real-time lipidenbiochemie
- Gezamenlijk onderzoek kan leiden tot verbeteringen in de productie van koolstofvezels
- Zonnebrandcrèmes worden onder zonlicht afgebroken tot gevaarlijke chemische verbindingen
- Voedsel- en drugsvervalsingen en fraude doorzien
- Beter begrip van de redenen achter de versterkte opwarming van het Noordpoolgebied
- Het verschil tussen menselijke vlooien en hondenvlooien
- Betere neerslagvoorspellingen tot enkele uren van tevoren
- Ecosysteemherstel is een urgent probleem in gefragmenteerd regenwoud
- NASA onderzoekt orkaanschade aan de bossen van Puerto Rico
Hoofdlijnen
- Schaatsenrijders illustreren evolutionaire processen
- Hoe lepra werkt
- Nieuwe mechanismen ontdekt die bacteriën gebruiken om zichzelf te beschermen tegen antibiotica
- Detectorhonden bieden hoop om numbats te redden
- Hoe een prokaryotisch celmodel te maken
- Een vis, twee vissen - met behulp van een nieuw door MBARI ontworpen camerasysteem om roodbaars te tellen
- Rechtbank vindt het goed om een soort uil te doden om het effect op andere uilen te zien
- Wat gebeurt er met een dierlijke cel in een hypotone oplossing?
- 25 soorten onthuld voor 25 Genomes Project






 Nieuwe ontdekking kan nauwkeurige voorspelling van kankerverspreiding mogelijk maken voordat kanker zich ontwikkelt
Nieuwe ontdekking kan nauwkeurige voorspelling van kankerverspreiding mogelijk maken voordat kanker zich ontwikkelt- Wat is het doel van de slinger?
- Magnetische aard van complexe vortexachtige structuren
- Eerste lockdown-effect op luchtvervuiling werd overschat, onze studie onthult
- Onderzoekers bereiden goedkope kwantumdot-zonneverf
- De innerlijke werking van een levende cel in kaart brengen
- Draden aansluiten met een alligatorclip
- De straal van een zeshoek vinden
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
