Wetenschap
Een nieuwe benadering om ruimtelijke noties in robotsystemen te brengen
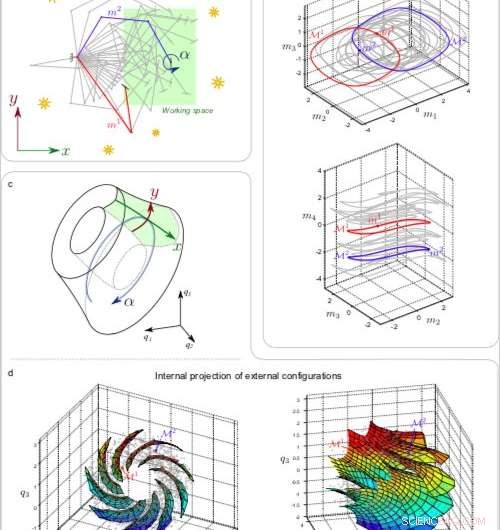
a) 1% van de 2500 verkenningsarmconfiguraties mi . b) Twee 3D-projecties van 1% van de sets Mi ingebed in de 4D-motorruimte. c) Schema van het geprojecteerde spruitstuk en vastleggen van externe parameters. d) Projectie in 3D van de 2500 spruitstukken Mi (grijze punten) met oppervlakken die overeenkomen met translaties in de werkruimte voor verschillende retinale oriëntaties. Krediet:Laflaquière et al.
Onderzoekers van Sorbonne Universités en CNRS hebben onlangs de voorwaarden onderzocht voor de opkomst van vereenvoudigde ruimtelijke noties in robotsystemen, gebaseerd op de sensorimotorische stroom van een robot. hun studie, voorgepubliceerd op arXiv, maakt deel uit van een groter project, waarin ze onderzochten hoe fundamentele perceptuele noties (zoals lichaam, ruimte, object, kleur, enz.) kunnen worden bijgebracht in biologische of kunstmatige systemen.
Tot dusver, de ontwerpen van robotsystemen weerspiegelen vooral de manier waarop mensen de wereld waarnemen. Het ontwerpen van robots die uitsluitend worden geleid door menselijke intuïtie, echter, hun waarnemingen kunnen beperken tot die van mensen.
Om volledig autonome robots te ontwerpen, onderzoekers moeten dus misschien afstand nemen van mensgerelateerde constructies, waardoor robotagenten hun eigen manier van waarnemen van de wereld kunnen ontwikkelen. Volgens het team van onderzoekers van Sorbonne Universités en CNRS, een robot moet geleidelijk zijn eigen perceptuele noties ontwikkelen, uitsluitend door zijn sensomotorische ervaringen te analyseren en betekenisvolle patronen te identificeren.
"De algemene hypothese is dat niemand perceptuele noties geeft aan biologische organismen, "Alexander Terechov, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Deze concepten worden in plaats daarvan in de loop van de tijd ontwikkeld, als nuttige hulpmiddelen die hen helpen de enorme sensomotorische gegevens waaraan ze voortdurend worden blootgesteld te begrijpen. Als gevolg hiervan, het idee van een kikker over ruimte zal hoogstwaarschijnlijk verschillen van dat van een vleermuis, die op zijn beurt zal verschillen van die van mensen. Dus bij het bouwen van een robot, welk begrip van ruimte moeten we eraan geven? Waarschijnlijk geen van deze. Als we willen dat robots echt intelligent zijn, we moeten ze niet bouwen met abstracte begrippen, maar in plaats daarvan, geef ze algoritmen waarmee ze zelf dergelijke noties kunnen ontwikkelen."
Terekhov en zijn collega's toonden aan dat het idee van ruimte als omgevingsonafhankelijk niet alleen kan worden afgeleid door exteroceptieve informatie, aangezien deze informatie sterk varieert, afhankelijk van wat er in de omgeving wordt aangetroffen. Dit begrip zou beter kunnen worden gedefinieerd door te kijken naar functies die motorische commando's koppelen aan veranderingen in stimuli die extern zijn aan de agent.
"Belangrijk inzicht kwam uit een oude studie van de beroemde Franse wiskundige Henri Poincare, die geïnteresseerd was in hoe wiskunde in het algemeen en meetkunde in het bijzonder uit menselijke waarneming kunnen voortkomen, " Zei Terekhov. "Hij suggereerde dat het toeval in de sensorische input een cruciale rol zou kunnen spelen."
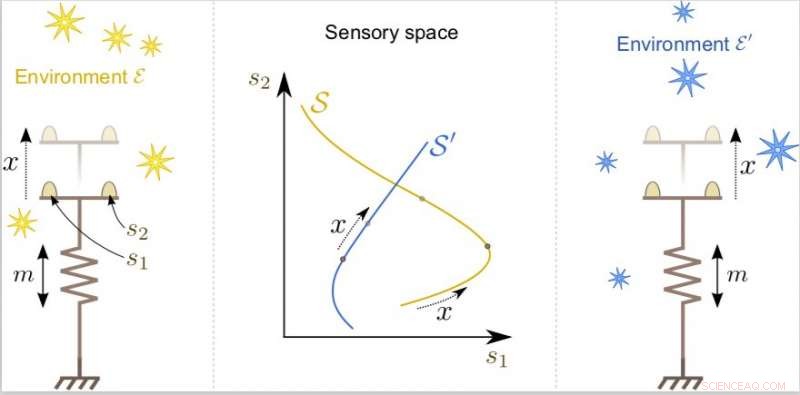
De agent kan zijn sensoren in de buitenruimte bewegen met behulp van zijn motor. Hoewel de externe agentconfiguratie x hetzelfde kan zijn, de zintuiglijke ervaring varieert sterk, afhankelijk van de structuur van de omgeving. Krediet:Laflaquière et al.
De ideeën van Poincare kunnen beter worden uitgelegd met een eenvoudig voorbeeld. Als we naar een bepaald object kijken, de ogen leggen een bepaald beeld vast, die verandert als het object 10 cm naar links beweegt. Echter, als we 10 cm naar links gaan, het beeld dat we zien zal bijna precies hetzelfde blijven.
"Deze eigenschap lijkt wonderbaarlijk als je bedenkt hoeveel receptoren het menselijk lichaam heeft, "Terekhov zei. "Het is bijna onmogelijk om twee keer in je leven dezelfde input te hebben, toch ervaren we het voortdurend. Deze gebeurtenissen met een lage waarschijnlijkheid kunnen door de hersenen worden gebruikt om algemene perceptuele noties te construeren."
Om deze ideeën toe te passen op het ontwerp van robotsystemen, de onderzoekers programmeerden een virtuele robotarm met een camera aan de punt. De robot noteerde de metingen die uit de gewrichten van de arm kwamen elke keer dat hij dezelfde visuele invoer ontving. "Door al deze metingen te associëren, de robot bouwt een abstractie die wiskundig equivalent is aan de positie en oriëntatie van zijn camera, ook al heeft het geen expliciete toegang tot deze informatie, "Zei Terekhov. "Het belangrijkste is dat hoewel dit abstracte begrip wordt geleerd op basis van de visuele input, het wordt er uiteindelijk onafhankelijk van, en werkt dus voor alle omgevingen; op dezelfde manier is ons idee van ruimte niet afhankelijk van de specifieke scène die we zien."
Hetzelfde principe toepassen in een andere studie, de onderzoekers hebben met succes een robot ertoe aangezet om een optische vervorming te compenseren die wordt veroorzaakt door een lens die voor zijn camera is geplaatst. Typisch, dit zou worden bereikt door algoritmen te trainen op paren vervormde en onvervormde beelden.
"Het lastige van onze studie was dat de robot deze taak moest voltooien door alleen in de vervormde beelden te kijken, net zoals mensen leren om de vervorming te compenseren die wordt veroorzaakt door een bril, " zei Terekhov. "Wij geloven dat de principes geïntroduceerd door Poincare, die de basis vormen van onze algoritmen, kunnen algemener zijn en worden op meerdere niveaus door de hersenen gebruikt. We onderzoeken momenteel de mogelijkheid om deze principes te gebruiken om neurale netwerken te bouwen die niet lijden aan catastrofale vergeten en geleidelijk kennis kunnen vergaren."
© 2018 Tech Xplore
 Superkritisch antwoord op afgewerkte olie gevonden
Superkritisch antwoord op afgewerkte olie gevonden- Hoe werken pH-buffers?
- Schelpen en grapefruits inspireren het eerste vervaardigde niet-snijbare materiaal
- Beton met verbeterd slagvastheid voor verdedigingsconstructies
- Magneten gebruiken om chemische reacties te beheersen die gericht zijn op de afgifte van medicijnen in het lichaam
- Bodemgezondheid verbeterd door toevoeging van kleine granen en grasland aan rotaties
- The Differences in Woods, Forests & Jungles
- Zwavelhexafluoride:de waarheden en mythen van dit broeikasgas
- Extreme neerslaggebeurtenissen hebben altijd plaatsgevonden, maar veranderen ze?
- Door droogte geteisterd Kaapstad verscherpt waterbeperkingen
Hoofdlijnen
- Huismuizen kunnen hun vocalisaties moduleren, afhankelijk van het geslacht van de ontvanger
- Menselijke resten gevonden in grote Australische krokodil
- Hoe bacteriën hun motoren turbochargeerden
- Nieuwe studie wijst op onverwachte voordelen van rabiësvaccinatie bij honden
- Dodelijk beheer van wolven op één plek kan de situatie in de buurt erger maken
- Hoe bijen hun weg naar huis vinden
- Waarom lopen mensen meestal in dezelfde richting?
- De rol van microfilamenten in cytokinese
- Kunnen we onze organen klonen voor gebruik bij een transplantatie?
- Waarom AI-robotspeelgoed goed kan zijn voor kinderen

- Nieuwe Australische wetten kunnen leiden tot gevangenisstraffen voor execs van sociale media vanwege terreurbeelden

- Lijkzakken, ratten, verspilling:rampenbestrijding schakelt VR in voor grimmige training

- Een kern van waarheid benaderen

- Technologie om heteluchtballonnen te gebruiken voor raketlanceringen concurreert in een startup-slagveld


 EU-leiders slagen er niet in om 2050-doelstelling van nul netto koolstofemissies vast te stellen
EU-leiders slagen er niet in om 2050-doelstelling van nul netto koolstofemissies vast te stellen- NASA kijkt hoe de tropische storm Jose wordt georganiseerd
- Hoe Molaire massa te berekenen
- Hoe beïnvloedt Wind Weer Weer?
- Onderzoekers bereiken universele route naar familie van penta-verbroederde gouden nanokristallen
- Pluim van Saharastof veroorzaakte piek in Europese luchtvervuiling
- Amazons cloud computing zal Seattle Seahawks helpen data aan te pakken voor een concurrentievoordeel
- Voedingskleurstoffen neutraliseren in Water
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
