Wetenschap
Ingenieur die humanoïde robots leert hun handen te gebruiken om te voorkomen dat ze vallen
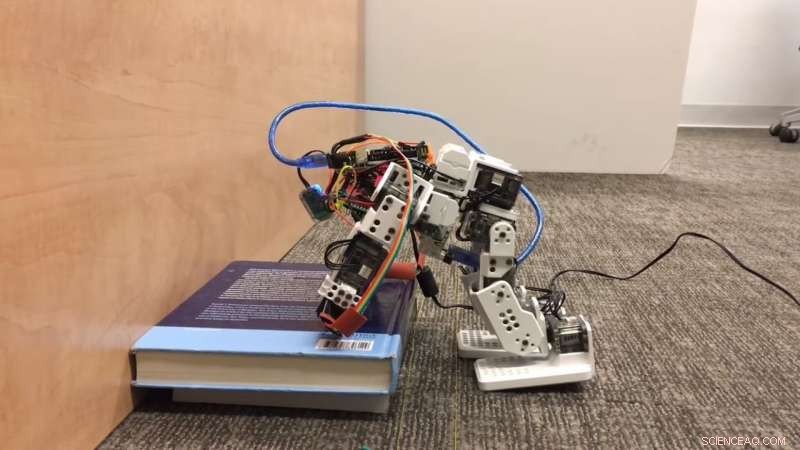
Een beroemde virale video over de DARPA Robotics Challenge toont allerlei humanoïde robots die onhandig naar beneden vallen. Tweevoetige beweging is nogal onstabiel, wat niet alleen een probleem is voor een robot die zijn taak probeert te voltooien, maar ook omdat vallen een zeer duur apparaat kan beschadigen.
Robotici over de hele wereld pakken dit probleem op talloze manieren aan. Terwijl sommigen een reeks corrigerende stappen willen toevoegen nadat een robot uit balans is geraakt, net als een persoon die struikelt nadat hij is gestruikeld, Kris Hauser wil dat robots de omgeving om hen heen kunnen gebruiken.
"Als een persoon naar een muur of een rail wordt geduwd, ze zullen dat oppervlak kunnen gebruiken om zichzelf rechtop te houden met hun handen. We willen dat robots hetzelfde kunnen doen, " zei Kris Hauser, universitair hoofddocent elektrotechniek en computertechniek en werktuigbouwkunde en materiaalkunde aan Duke. "We geloven dat we de enige onderzoeksgroep zijn die eraan werkt om een robot dynamisch te laten kiezen waar hij zijn handen plaatst om te voorkomen dat hij valt."
Hoewel dergelijke beslissingen en acties een tweede natuur voor ons zijn, programmeren in de reflexen van een robot is bedrieglijk moeilijk. Om het proces te stroomlijnen en rekentijd te besparen, Hauser programmeert de software om zich alleen te concentreren op de heup- en schoudergewrichten van de robot.
Zolang de robot niet draait als hij valt, dit creëert slechts drie hoeken waarmee het stabilisatie-algoritme rekening moet houden:de voet naar de heup, de heup tot de schouder, en de schouder aan de hand. De robot moet nabijgelegen oppervlakken binnen bereik identificeren en vervolgens snel de beste combinatie van hoeken berekenen om zichzelf op te vangen. De uiteindelijke oplossing minimaliseert de impact wanneer de handen van de robot contact maken, en minimaliseert ook de kans dat zijn handen of voeten wegglijden. Het algoritme neemt zijn beste gok en optimaliseert het vervolgens geleidelijk met behulp van een methode die direct shooting wordt genoemd.
In zijn huidige staat, de robot krijgt informatie over zijn omgeving en kan niet zelfstandig navigeren. Maar in de nabije toekomst, Hauser is van plan om te upgraden naar een grotere robot met zijn eigen camerasensoren om hem zijn omgeving te laten zien.
"Hopelijk moeten we tegen het einde van het jaar experimenten doen met de robot die daadwerkelijk in een live hindernisbaan werkt, Hauser zei. "Dan zullen we proberen de robot zowel dynamisch in kaart te brengen wat er omheen is als te redeneren hoe hij zichzelf kan beschermen tegen vallen in willekeurige omgevingen."
 Welke elementen maken glucose
Welke elementen maken glucose - RNA-microchips
- Doorbraak in het benutten van de kracht van biologische katalysatoren
- Perfecte dranken en vloeibare voeding tot op moleculair niveau
- Nieuw organisch plastic materiaal zorgt ervoor dat elektronica bij extreme temperaturen kan functioneren zonder in te boeten aan prestaties
- Veranderingen in de controle van het ijsvolume methaanemissies op de zeebodem
- Nieuwe wereldwijde temperatuurgegevens zullen bijdragen aan onderzoek naar klimaateffecten op gezondheid, landbouw
- Brandweerlieden strijden tegen bosbranden in Portugal terwijl de wind aantrekt
- Westerse bosbranden kalmeren bij koud weer, maar verliezen groeien
- De diepzee warmt langzaam op
Hoofdlijnen
- De chemische samenstelling van voedingsstoffen Agar
- Verschillen tussen Protista & Monera
- Tsjaad breidt belangrijk natuurgebied in nationaal park uit
- Hoe ziet een door vrouwen gerunde samenleving eruit?
- Een geïntegreerde beoordeling van vaatplantensoorten in Amerika
- Hoe Royal Jelly wordt geoogst?
- Vijf soorten aseksuele reproductie
- Verwarde walvis blokkeert de jachthaven van Marseille
- Opkomende ziekte brengt Noord-Amerikaanse kikkers verder in gevaar
- Chinas Huawei zegt dat 19 verkopen met 19% zijn gestegen, ondanks Amerikaanse sancties
- Door Softbank gefinancierde hotelfirma Oyo ontslaat 10% van het Indiase personeel

- Nieuwe Angry Birds-televisieserie komt uit

- Steeds meer op WhatsApp gaan lijken, zal de ellende van Facebook niet oplossen - hier is waarom

- AT&T stopt alle verkoop van locatiegegevens aan gegevensmakelaars


 Afbeelding:De Perzische Golf
Afbeelding:De Perzische Golf- Feiten over functies voor algebra 1
- De geschiedenis leert ons dat spiralen van ideologische zuiverheid zelden goed aflopen
- COVID-19-studie onderzoekt hoe mensen reageren op thuisblijfbestellingen
- NRL behaalt hoogste nullastspanning voor quantum dot-zonnecellen
- De cryosfeer van de aarde krimpt met 87, 000 vierkante kilometer per jaar
- De kobaltafzettingen op aarde werden veel later gevormd dan eerder werd aangenomen
- De effecten van straling op dieren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
