Wetenschap
Robots kunnen veel leren van de natuur als ze de wereld willen zien
‘Zien’ door robotogen. Krediet:Shutterstock/TrifonenkoIvan
Visie is een van de verbazingwekkende creaties van de natuur die al honderden miljoenen jaren bij ons is. Het is een belangrijk zintuig voor mensen, maar een die we vaak als vanzelfsprekend beschouwen:dat is, totdat we het beginnen te verliezen of we proberen het opnieuw te maken voor een robot.
Veel onderzoekslaboratoria (waaronder die van ons) modelleren al decennialang aspecten van de zichtsystemen die bij dieren en insecten worden aangetroffen. We putten veel uit studies zoals die gedaan bij mieren, bij bijen en zelfs bij knaagdieren.
Om een biologisch systeem te modelleren en bruikbaar te maken voor robots, je moet meestal zowel de gedragsmatig en neuraal basis van dat visiesysteem.
De gedragscomponent is wat je het dier ziet doen en hoe dat gedrag verandert als je knoeit met wat het kan zien, bijvoorbeeld door verschillende configuraties van oriëntatiepunten te proberen. De neurale componenten zijn de circuits in de hersenen van het dier die ten grondslag liggen aan visueel leren voor taken, zoals navigatie.
Gezichten herkennen
Erkenning is een fundamenteel visueel proces voor alle dieren en robots. Het is het vermogen om bekende mensen te herkennen, dieren, objecten en oriëntatiepunten in de wereld.
Vanwege het belang ervan, gezichtsherkenning komt deels "ingebakken" in natuurlijke systemen zoals een baby. We kunnen al heel vroeg gezichten herkennen.
Langs die lijnen, sommige kunstmatige gezichtsherkenningssystemen zijn gebaseerd op hoe biologische systemen zouden werken. Bijvoorbeeld, onderzoekers hebben sets van neurale netwerken gecreëerd die verschillende niveaus van de visuele verwerkingshiërarchie bij primaten nabootsen om een systeem te creëren dat in staat is tot gezichtsherkenning.

Het visueel herkennen van een plaats is eenvoudig … totdat het uiterlijk van die plaats drastisch verandert. Krediet:Michael Milford
Plaatsen herkennen
Visuele plaatsherkenning is een belangrijk proces voor alles wat door de wereld navigeert.
Plaatsherkenning is het proces waarbij een robot of dier naar de wereld om hem heen kijkt en in staat is om wat hij nu ziet te verzoenen met een eerdere herinnering aan een plaats, of in het geval van mensen, een beschrijving of verwachting van die plaats.
Vóór de komst van GPS-navigatie, we hebben misschien instructies gekregen zoals "rijd door totdat je de kerk aan de linkerkant ziet en neem de volgende afslag naar rechts". We weten hoe een typische kerk eruitziet en kunnen er dus een herkennen als we hem zien.
Deze plaatsherkenning klinkt misschien als een gemakkelijke taak, totdat men uitdagingen tegenkomt zoals uiterlijkverandering - bijvoorbeeld de verandering in het uiterlijk veroorzaakt door dag-nachtcycli of door ongunstige weersomstandigheden.
Een andere uitdaging bij het visueel herkennen van een plaats is: gezichtspunt veranderen :veranderingen in hoe een plaats eruitziet als je deze vanuit een ander perspectief bekijkt.

Wanneer bekeken vanuit tegengestelde gezichtspunten, dezelfde plaats lijkt heel anders. Krediet:neyro2008 / Alexander Zelnitskiy / Maxim Popov / 123rf.com / 1 jaar, 1, 000 km:de Oxford RobotCar-gegevensset
Een extreem voorbeeld hiervan kom je tegen wanneer je voor het eerst een route langs een weg volgt:je ontmoet alles in de omgeving vanuit het tegenovergestelde gezichtspunt.
Het creëren van een robotsysteem dat deze plek ondanks deze uitdagingen kan herkennen, vereist dat het visiesysteem een dieper begrip heeft van wat zich in de omgeving eromheen bevindt.
Sensing vermogen
Visuele sensing-hardware is het afgelopen decennium snel vooruitgegaan, deels gedreven door de verspreiding van zeer capabele camera's in smartphones. Moderne camera's evenaren of overtreffen nu zelfs de meer capabele natuurlijke zichtsystemen, althans in bepaalde aspecten.
Bijvoorbeeld, een consumentencamera kan nu net zo goed zien als een aangepast menselijk oog in het donker.
Nieuwe smartphonecamera's kunnen ook video opnemen op 1, 000 beelden per seconde, waardoor het potentieel ontstaat voor robotvisiesystemen die met een hogere frequentie werken dan een menselijk zichtsysteem.
Gespecialiseerde robotvisiedetectie zoals de Dynamic Vision Sensor (DVS) zijn nog sneller, maar rapporteren alleen de verandering in de helderheid van een pixel, in plaats van zijn absolute kleur. Je kunt het verschil hier zien tijdens een wandeling door Hyde Park in Londen:
Niet alle robotcamera's hoeven ook te zijn zoals conventionele camera's:robotici gebruiken gespecialiseerde camera's die zijn gebaseerd op hoe dieren zoals mieren de wereld zien.
Vereiste resolutie?
Een van de fundamentele vragen in al het op visie gebaseerde onderzoek voor robots en dieren is welke visuele resolutie (of gezichtsscherpte) nodig is om "de klus te klaren".
Voor veel insecten en dieren zoals knaagdieren, a relatively low visual resolution is all they have access to—equivalent to a camera with a few thousand pixels in many cases (compared with a modern smartphone which has camera resolutions ranging from 8 Megapixels to 40 Megapixels).
The required resolution varies greatly depending on the task—for some navigation tasks, only a few pixels are required for both animals such as ants and bees and robots.
But for more complex tasks—such as self-driving cars—much higher camera resolutions are likely to be required.
If cars are ever to reliably recognise and predict what a human pedestrian is doing, or intending to do, they will likely require high resolution visual sensing systems that can pick up subtle facial expressions and body movement.
A tension between bio-inspiration and pragmatism
For roboticists looking to nature for inspiration, there is a constant tension between mimicking biology and capitalising on the constant advances in camera technology.
While biological vision systems were clearly superior to cameras in the past, constant rapid advancement in technology has resulted in cameras with superior sensing capabilities to natural systems in many instances. It's only sensible that these practical capabilities should be exploited in the pursuit of creating high performance and safe robots and autonomous vehicles.
But biology will still play a key role in inspiring roboticists. The natural kingdom is superb at making highly capable vision systems that consume minimal space, computational and power resources, all key challenges for most robotic systems.

Bees navigate effectively using a relatively low resolution visual sensing capability. Credit:Bogdan Mircea Hoda / 123rf.com
Dit artikel is oorspronkelijk gepubliceerd op The Conversation. Lees het originele artikel. 

Hoofdlijnen
- Onderzoekers ontdekken slecht begrepen bacteriële lijnen in de monden van dolfijnen
- Wat zijn de niveaus van organisatie in de biologie?
- Hoe menselijke Wang-cellen te observeren onder een lichtmicroscoop
- Het belang van DNA in de menselijke cel
- Hoe te lezen Proteïne elektroforese
- Biosfeer: definitie, hulpbronnen, cycli, feiten en voorbeelden
- Denken dieren rationeel? Onderzoeker suggereert dat rationele besluitvorming geen taal vereist
- Californische vogels nestelen een week eerder dan een eeuw geleden
- Onderzoeker ontdekt dat wanneer sperma concurreert, eieren hebben een keuze
- Big Tech wordt geconfronteerd met een nieuwe reeks vijanden:bijna alle 50 Amerikaanse staten

- Verkoop Renault daalt in verzwakkende automarkt

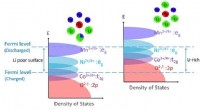
- Gradiënt Li-rijke oxide kathodedeeltjes voor batterijen met minimale zuurstofafgifte
- Artiesten verzilveren de online stickerrage van China

- Common Laboratory Apparatus With Their Uses


 Geleidingsmodus schakelen - een stap in de richting van topologische transistors
Geleidingsmodus schakelen - een stap in de richting van topologische transistors- Denk je dat je een hersenschudding hebt? Een bloedtest kan het diagnosticeren
- Hoe de boog van St. Louis tegen alle verwachtingen in staat
- Helpt het antiparasitaire medicijn te verminderen
- Wat betekent CERN voor de toekomst van het heelal?
- Transat-aandeelhouders accepteren overname Air Canada
- SpaceX vs NASA:wie brengt ons als eerste naar de maan? Hier is hoe hun nieuwste raketten zich verhouden:
- 2 wetenschappers winnen Nobelprijs voor scheikunde voor tool voor genbewerking
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
