Wetenschap
ExoMars-software slaagt voor ESA Mars Yard-rijexamen
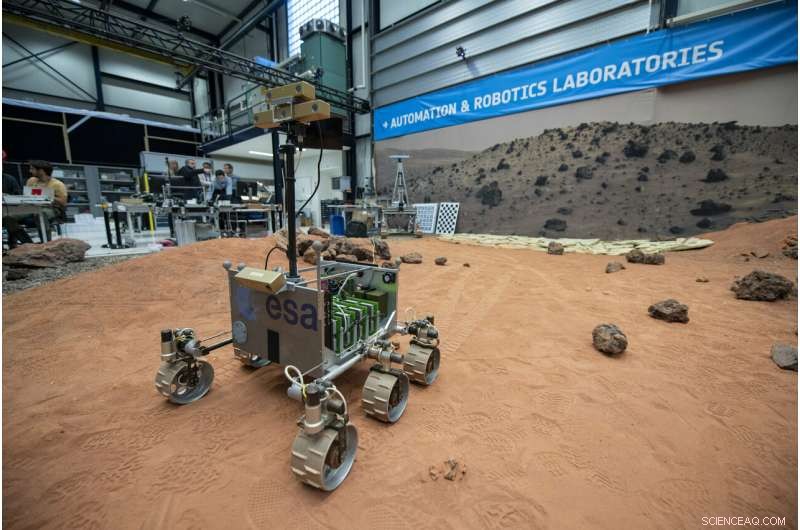
Een halfschaalversie van de ExoMars-rover, genaamd ExoMars Testing Rover (ExoTeR), zichzelf voorzichtig zien manoeuvreren door de rode rotsen en het zand van 9x9 m Planetary Utilization Testbed, onderdeel van ESA's Planetary Robotics Laboratory in het technische centrum ESTEC in Nederland, als een test van autonome navigatiesoftware bestemd voor ESA's ExoMars 2020-missie naar de Rode Planeet. Krediet:ESA-G. Portier, CC BY-SA 3.0 IGO
Navigatiesoftware bestemd voor de ExoMars 2020-missie naar de Rode Planeet is geslaagd voor een op rover gebaseerde rijtest op ESA's 'Mars Yard'.
ESA's ExoMars-rover zal naar meerdere locaties rijden en tot twee meter onder het oppervlak van Mars boren op zoek naar aanwijzingen voor vorig leven dat ondergronds is bewaard.
Een halfschaalversie van de ExoMars-rover, genaamd ExoMars Testing Rover (ExoTeR), manoeuvreerde zich voorzichtig door de rode rotsen en het zand van het 9 x 9 m 'Planetary Utilization Testbed', bijgenaamd de Mars Yard, onderdeel van ESA's Planetary Robotics Laboratory bij ESTEC in Nederland.
De verdere route zorgvuldig berekenen, ExoTeR vorderde met een snelheid van 2 m per minuut - nog steeds meerdere keren sneller dan de werkelijke ExoMars-rover zal rijden, die met 100 m per Marsdag zal toenemen.
De tweedaagse rover-test werd uitgevoerd door ESA-robotingenieurs, vergezeld door een team van de Franse ruimtevaartorganisatie CNES in Toulouse. Ze hebben meer dan twee decennia ervaring in autonome navigatie voor planetaire rovers, culminerend in de ontwikkeling van de 'AutoNav'-softwaresuite die het rijden deed.
In 2017 werd ExoTeR overgedragen aan ALTEC in Italië, de site van ExoMars' rover monitoring- en controlecentrum, om het controleteam te laten trainen met de geavanceerde rover. In december, de rover keerde terug naar ESTEC voor een upgrade naar zijn autonome navigatie-algoritme.
De navigatietest volgde, bevestigen dat de software goed functioneerde. Volgende ExoTeR keert terug naar Italië, waardoor het ALTEC-controleteam ervaring kan opdoen met de toegevoegde functionaliteit van autonome navigatie.
De enorme afstand van de aarde tot Mars staat gelijk aan een signaalvertraging van tussen de vier en 24 minuten, waardoor directe controle over ExoMars onpraktisch wordt. In plaats daarvan zal de rover in staat zijn om enkele van zijn eigen beslissingen te nemen.
"In plaats van volledige risicovrije banen te sturen voor de rover om te volgen, autonome navigatie stelt ons in staat om het alleen een richtpunt te sturen, ", legt ESA-robotica-ingenieur Luc Joudrier uit.
"De rover maakt een digitale kaart van zijn omgeving en berekent hoe dat doel het beste kan worden bereikt. Als hij naar de kaart kijkt, probeert hij de rover op al deze aangrenzende locaties te plaatsen om te bepalen of de rover veilig zou zijn in elk van deze posities – of als de rotsen te hoog zijn of het terrein te steil.

Een halfschaalversie van de ExoMars-rover, genaamd ExoMars Testing Rover (ExoTeR), wordt gebruikt om door CNES ontwikkelde autonome navigatiesoftware te testen in de rode rotsen en het zand van 9x9 m Planetary Utilization Testbed, onderdeel van ESA's Planetary Robotics Laboratory in het technische centrum ESTEC in Nederland. Krediet:ESA-G. Portier, CC BY-SA 3.0 IGO
"Werken vanaf de lokale navigatiekaart, de rover berekent het veilige pad naar het doel en begint langs een segment van het berekende pad te bewegen, aan het einde van het segment herhaalt het hetzelfde mappingproces om verder te gaan.
"Het is vergelijkbaar met het lopen van een mens. We kijken vooruit om te beslissen waar we heen gaan, maar terwijl we lopen, kijken we naar onze voeten en veranderen zo nodig van koers om obstakels te vermijden. Als we eenmaal een pad zonder obstakels hebben gekozen, we zorgen ervoor dat we dat pad volgen om veilig te blijven."
De ExoTeR-rover, zoals de ExoMars-rover zelf, is uitgerust met op de mast gemonteerde stereonavigatiecamera's voor digitale hoogtekaarten. En terwijl het vooruit rijdt, het controleert voortdurend zijn voortgang met behulp van een paar camera's in het voorste chassis.
Deze op visie gebaseerde bewegingsregistratie werkt beter dan simpelweg de draaiing van de wielen van de rover te meten, omdat het de controllers in staat stelt om eventuele wielslip in aanmerking te nemen - rovers op Mars zijn eerder gevangen in diep zand, en het voortdurende draaien van het wiel zou ze zelfs dieper kunnen graven.

De ExoTeR-rover, zoals de ExoMars-rover zelf, is uitgerust met op de mast gemonteerde stereonavigatiecamera's voor digitale hoogtekaarten. Krediet:ESA-G. Portier, CC BY-SA 3.0 IGO
De ExoTeR-rover, compleet met bijgewerkte software, is nu ingesteld om terug te keren naar ALTEC in Italië, waardoor het controleteam ervaring kan opdoen met de toegevoegde functionaliteit van autonome navigatie voordat de vluchtsoftware van ExoMars wordt voltooid.
De laatste vluchtsoftware van ExoMars zal eigenlijk twee sets autonome navigatiesoftware bevatten, met een andere ontwikkeld door Airbus in Stevenage, VK.
"De combinatie moet de rover extra flexibiliteit geven, " zegt Luc. "Het idee is dat je op moeilijker terrein misschien beter gaat presteren, terwijl de andere sneller over gemakkelijker terrein zou kunnen bewegen."
 Multi-state schakelbare stationaire fase opent nieuwe deuren in chirale scheiding
Multi-state schakelbare stationaire fase opent nieuwe deuren in chirale scheiding- Ingenieurs ontwerpen kunstmatige synaps voor brain-on-a-chip hardware
- Hoe groeit een suikerkristal?
- Drie kenmerken van de perfecte vlam op een bunsenbrander
- Fout gevonden in waterbehandelingsmethode:het proces kan onbewust schadelijke chemicaliën genereren
- Tropische cycloon Idai gezien in het kanaal van Mozambique door NASA's Terra Satellite
- Wat eet regenwormen?
- Wetenschappers beginnen de geheimen van de kleur van de diepe oceaan te ontrafelen uit organisch materiaal
- Nieuwe inzichten over dierenbewegingen in brandgevoelige landschappen
- Verder gaan dan de groene revolutie in het nieuwe hongertijdperk van Afrika
Hoofdlijnen
- Welke organen helpen het menselijk lichaam zich te ontdoen van verspillingen geproduceerd door cellen?
- 'S Werelds botanische tuinen bevatten een derde van alle bekende plantensoorten, en help de meest bedreigde te beschermen
- Hoe lijken mitochondriën en chloroplasten op bacteriën?
- Door klimaat beïnvloede veranderingen in bloei, vruchtvorming heeft ook invloed op de vogelstand, activiteiten
- Gezondheidsonderzoekers visualiseren een leven in silico
- Louis Pasteur: Biografie, uitvindingen, experimenten en feiten
- Genmutatie: definitie, oorzaken, typen, voorbeelden
- Glimlachende menselijke gezichten zijn aantrekkelijk voor honden - dankzij oxytocine
- Het verschil tussen histon en nonhistone




 Nanorod-LED's met dubbele functie kunnen multifunctionele displays maken
Nanorod-LED's met dubbele functie kunnen multifunctionele displays maken- NASA's Webb-telescoop spookachtige lichten uit inspectie
- Sticker is zelfklevende tracker in Tile-opstelling
- Europese wetenschappers, Ambtenaren waarschuwen tegen Amerikaans klimaatplan
- Afbeelding:De schoonheid van ijs
- Uit onderzoek van Theia 456 blijkt dat de bijna 500 sterren tegelijkertijd zijn geboren
- Als de verwarming aan is, we hebben stadsbrede plannen nodig om koel te blijven
- Verder zoeken dan seismologie naar voorlopers van aardbevingen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
