Wetenschap
Marsrover motoren vooruit
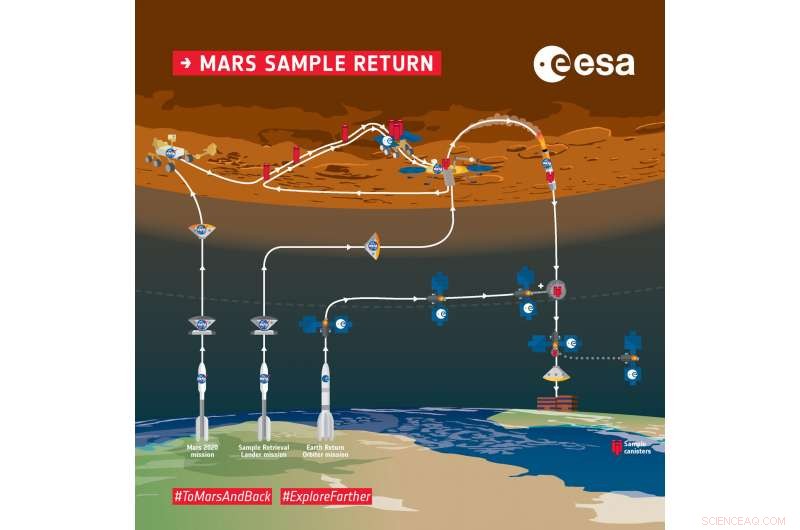
Mars Sample Return overzicht infographic. Krediet:ESA-K. Oldenburg
Europese ingenieurs, samen met Canada, werken aan de technologieën die nodig zijn om monsters van Mars te vinden en op te halen, als onderdeel van ESA's plannen om materiaal van de rode planeet naar de aarde te sturen.
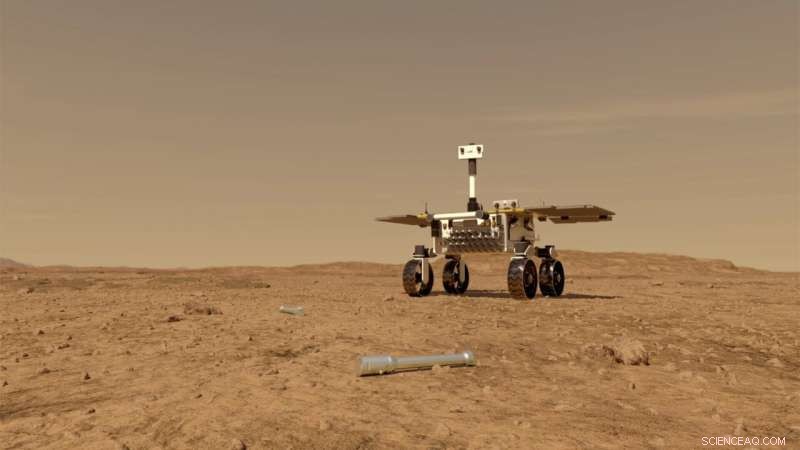
De Sample Fetch Rover moet autonoom navigeren, buizen met monsters detecteren die zijn verzameld en verpakt door een eerdere NASA-rover, pak ze op en breng ze terug naar de aarde.
ESA heeft Airbus geselecteerd voor de volgende fase van de ontwikkeling van de rover. Er is gewerkt aan hun locatie in Stevenage, VK, sinds juli 2018 om de haalbaarheid van het rover-concept te onderzoeken en vast te stellen.
De ESA Sample Fetch Rover zal deel uitmaken van de Mars Sample Return-campagne, met hardware geleverd door ESA en NASA, die ernaar streeft om tegen 2031 materiaal van het oppervlak van Mars naar de aarde te brengen.
Om de Mars-monsters terug te sturen, drie zorgvuldig getimede missies zijn vereist.
NASA's Mars 2020, deze zomer gelanceerd, zal de Perseverance Rover naar Mars sturen. De NASA-rover zal het oppervlak van Mars verkennen om monsters van gesteente en grond op te halen, verzegel ze in jerrycans en drop ze op strategische locaties.
Een verdere NASA-lancering van de Sample Retrieval Lander in juli 2026 zal de ESA Sample Fetch Rover afleveren in de buurt van de landingsplaats van Mars 2020.
De rover zal tot 15-20 km reizen, met dagelijkse stappen van ongeveer 200 m, om autonoom tot 36 monsterbuisjes op te sporen en te verzamelen die door Perseverance in de cache zijn opgeslagen en gedeponeerd.
Geavanceerde algoritmen zijn al getest in een kunstmatige Marsomgeving die de camera van de rover gebruiken om de exacte positie van de monsterbuizen te herkennen en te berekenen, die bedekt zou kunnen zijn met martiaans stof. Airbus coördineert ook Europese industrieën voor het ontwerp van een robotarm en grijpeenheid die aan boord van de rover zullen zijn om de monsterbuizen op te halen.
De buizen worden gedragen en vervolgens overgebracht, met behulp van een andere robotarm geleverd door ESA en geïnstalleerd op de Sample Retrieval Lander, naar het Mars Ascent Vehicle dat de monsters zal lanceren, beschermd in een monstercontainer ter grootte van een basketbal, in de baan van Mars.
ESA's Earth Return Obiter zal dan worden getimed om de container vanuit de baan van Mars te vangen voordat deze terug naar de aarde wordt gebracht om te landen in Utah, VS.
"Airbus en hun industriële partners brengen hun expertise en knowhow in het ontwerpen van rovertechnologieën, aangetoond door hun werk aan de ESA ExoMars-rover Rosalind Franklin, gepland voor lancering in 2022, " zegt Ludovic Dekbed, ESA Senior System and Technology Engineer op de Britse site van het bureau, die vanaf het begin het management van de Sample Fetch Rover-activiteiten heeft geleid.
"Cruciaal, dergelijk werk wordt voltooid met een co-engineeringbenadering. Er is veel interactie geweest tussen ESA, NASA's Jet Propulsion Laboratory die de lander ontwerpen, en het door Airbus geleide industriële consortium."
Krediet:NASA/JPL-Caltech
"Het is opwindend voor ons Airbus-team om zo'n belangrijke betrokkenheid te hebben bij het Mars Sample Return-programma, een belangrijke internationale samenwerking om een echte wereldprimeur te bereiken op het gebied van ruimteverkenning. " zegt Ben Boyes, Airbus-projectmanager voor Sample Fetch Rover.
"Het Sample Fetch Rover-project is een geweldige kans om gebruik te maken van de technologie die in het VK is ontwikkeld voor Rosalind Franklin, en bouw hierop voort met nieuwe geavanceerde autonome visuele herkenning, monsterophaalsysteem en een snellere rover om deze uitdagende missie af te leveren."
 Onderzoekers ontdekken dat landschapsruggen aanwijzingen kunnen bevatten over ijstijd en klimaatverandering
Onderzoekers ontdekken dat landschapsruggen aanwijzingen kunnen bevatten over ijstijd en klimaatverandering- Gemodificeerd switchgrass heeft geen negatief effect op bodems
- UITLEG:Wat zit er achter de hittegolf in het Amerikaanse Westen?
- Goldfish Science Projects
- Major State of the Planet-rapport voorafgaand aan de eerste Nobelprijstop
Hoofdlijnen
- Nu waren gestrest? Geschiedenis toont de oudste emotie
- Hoe wetenschappers ons hebben gered van de ineenstorting van de sint-jakobsschelp
- Wat levert glycolyse op?
- Zeldzame aardkers kan binnenkort overal zijn,
- Kleine wespenlichamen betekent kleine hersengebieden van wespen, studie toont
- De mens als model voor het begrijpen van biologische fundamenten
- Natuurbeschermingsgroep zegt dat Japan helpt bij illegale ivoorhandel (update)
- Migratie maakt broeden moeilijker voor zeevogels
- Vijf stappen om Agar te bereiden Slants
- Nieuw model voor onderzoeksactiviteiten rond quasars, zwarte gaten

- Nieuwe inzichten in stervorming in de kleinste sterrenstelsels

- SpaceX-capsule terug op aarde, weg vrijmaken voor nieuwe bemande Amerikaanse vluchten

- Nieuwe accretie-milliseconde röntgenpulsar ontdekt

- Nieuwe waterkringloop op Mars ontdekt

 NAFTA's ondergang zet Canada in het strafschopgebied, studie toont
NAFTA's ondergang zet Canada in het strafschopgebied, studie toont- Hoe ESD-matten te testen
- Gebrek aan bewijs zet Hawkings Nobel hoop in zwart gat
- Onderzoekers onthullen effecten van stofdeeltjes op wolkeneigenschappen
- Kenmerken van zuren, basen en zouten
- Een equivalentiepunt vinden Titratie
- Grafenen effecten op de longen
- Effecten van Mauna Loas Uitbarstingen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
