Wetenschap
NASA lanceert Raven om autonoom rendez-vous vermogen te ontwikkelen
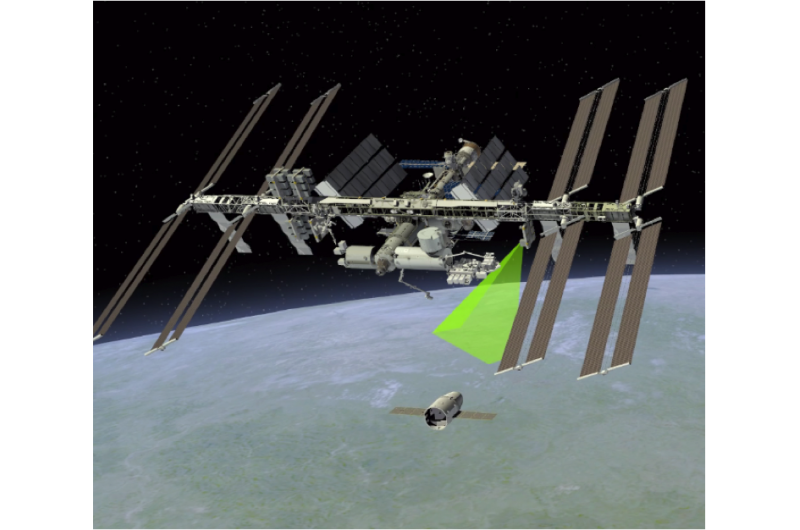
Een artistieke weergave van Raven die een voertuig volgt dat het internationale ruimtestation nadert. Krediet:NASA's Goddard Space Flight Center
Binnenkort gelanceerd, aan boord van de 10e commerciële bevoorradingsmissie van SpaceX, wordt een technologiemodule genaamd Raven, wat NASA een stap dichter bij een relatief navigatievermogen zal brengen. Wanneer aangebracht buiten het internationale ruimtestation, Raven zal fundamentele technologieën testen die autonoom rendez-vous in de ruimte mogelijk maken, wat betekent dat ze geen menselijke tussenkomst nodig hebben, zelfs niet vanaf de grond.
Om je voor te stellen waarom autonoom rendez-vous belangrijk is bij ruimtemissies, stel je dit scenario voor:een ruimtevaartuig volgt een andere satelliet, gestaag het gat dichten - waarbij elk voertuig meer dan 16 rijdt, 000 mijl per uur in de duisternis van de ruimte. De satelliet die wordt bediend, de cliënt, is een multi-tons vaartuig dat bijna geen brandstof meer heeft. De volledig gerobotiseerde onderhoudssatelliet, de bediende, genaamd Restore-L volgt in de achtervolging, met levensverlengend drijfgas en gereedschap.
De cliënt, niet ontworpen om te worden onderhouden, heeft geen markeringen om het voor de beheerder gemakkelijker te maken om het te vinden en te beveiligen. De beheerder moet dit zelf doen, met behulp van een geavanceerd machine vision-systeem, geperfectioneerd met behulp van de gegevens die door Raven aan boord van het ruimtestation zijn verzameld. Succesvol onderhoud hangt eerst af van het vermogen van de beheerder om de snelheid nauwkeurig te lokaliseren en af te stemmen op de satelliet van de klant.
Om dit scenario nog ingewikkelder te maken, de beheerder is ver van de aarde, het creëren van een communicatievertraging voor commando en gegevensuitwisseling van en naar de ruimte. De vertraging verhindert grondoperators om snel en nauwkeurig commando's te geven aan de beheerder om een mogelijke botsing binnen de laatste paar meter van het rendez-vous te voorkomen.
Daarom, de servicer moet relatieve navigatie uitvoeren met zijn klant, en het moet dit autonoom doen (op zichzelf, zonder menselijke begeleiding), en in realtime.
"Twee autonoom rendez-vous ruimtevaartuigen is cruciaal voor veel toekomstige NASA-missies en Raven ontwikkelt deze nooit eerder geprobeerde technologie, " zei Ben Reed, plaatsvervangend afdelingsdirecteur, voor de Satellite Servicing Projects Division (SSPD) bij NASA's Goddard Space Flight Center in Greenbelt, Maryland - het bureau dat deze demonstratiemissie ontwikkelt en beheert.
Raven demonstreert de mogelijkheden van een baanbrekend relatief navigatiesysteem, gehuisvest in zijn handbagage-formaat frame, waarmee een ruimtevaartuigserver kan vinden, en indien nodig, het beoogde doel te vangen. Raven wil leiden tot een volledig ontwikkeld, volwassen systeem beschikbaar voor toekomstige NASA-missies.

Raven technologie module, voorstart. Krediet:NASA's Goddard Space Flight Center/Chris Gunn
Vijf dagen na de lancering, Raven zal worden verwijderd uit de drukloze "kofferbak" van het SpaceX Dragon-ruimtevaartuig door de Dextre-robotarm, en bevestigd op een laadplatform buiten het ruimtestation. Vanaf deze baars, Raven zal beginnen met het verstrekken van informatie voor de ontwikkeling van een volwassen realtime relatief navigatiesysteem.
Tijdens zijn verblijf aan boord van het ruimtestation, De componenten van Raven zullen hun krachten bundelen om onafhankelijk inkomende en uitgaande bezoekende ruimtestationruimtevaartuigen in beeld te brengen en te volgen. Om dit te doen, Raven's sensoren sturen gegevens die ze 'zien' naar een processor, die reeksen instructies uitvoert (ook bekend als speciale pose-algoritmen) om de relatieve afstand tussen Raven en het ruimtevaartuig dat het volgt te meten. Vervolgens, op basis van deze berekeningen de processor stuurt autonoom opdrachten die de Raven-module op zijn gimbal draaien, of aanwijssysteem, om de sensoren op het voertuig gericht te houden, terwijl u het blijft volgen. Terwijl deze manoeuvres plaatsvinden, NASA operators on the ground will evaluate how Raven's technologies work together as a system, and will make adjustments to increase Raven's tracking performance.
Over its two-year lifespan, Raven will test these critical technologies that are expected to support future NASA missions for decades to come. One upcoming application for this technology is its use in the Restore-L servicing mission which will navigate to refuel Landsat 7, a U.S. government Earth-observing satellite already in orbit. An additional application is the potential use for systems on NASA's Journey to Mars. Raven is on track to advance and mature the sensors, machine vision algorithms, and processing necessary to implement a robust autonomous rendezvous and docking system for NASA. SSPD is developing and managing both the Raven and Restore-L demonstration missions.

Hoofdlijnen
- Factoren die betrokken zijn bij celdifferentiatie
- Chemische stoffen gebruikt in DNA-analyse
- Waarom zijn de Neanderthalers uitgestorven?
- Wat volgt glycolyse als zuurstof aanwezig is?
- Hoe hoogte te bepalen via het skelet
- Van wilde kamelen tot cocaïne-nijlpaarden, grote dieren verwilderen de wereld
- Camponotini-mierensoorten hebben hun eigen verschillende microbiomen
- Voelen planten pijn?
- Wetenschappers onderzoeken de gevolgen voor de nationale veiligheid van genbewerking
- HiRISE bekijkt NASA's InSight en Curiosity op Mars

- IJzige reuzenplaneten in het laboratorium
- Er wordt gejaagd op de dichtstbijzijnde aardachtige planeten
- SpaceX Dragon levert onderzoek aan ruimtestation

- Onderzoekers suggereren dat collapsar accretieschijven de bron van de zwaarste elementen kunnen zijn


 Lockheed Martin bouwt prototype op ware grootte van NASA cislunaire habitat
Lockheed Martin bouwt prototype op ware grootte van NASA cislunaire habitat- ESAILs eerste kaart van wereldwijde verzending
- Energiestroom (ecosysteem): definitie, proces en voorbeelden (met diagram)
- Maakt klimaatverandering orkanen al sterker?
- 3D-afdrukbaar gratis maskerontwerp is het eerste in zijn soort dat federale goedkeuring heeft gekregen
- Atlanta:een lanceerplatform voor dromen
- De evolutie van de taal? Daar is een app voor
- Onderzoekers beoordelen de snelle vooruitgang in machine learning voor de chemische wetenschappen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
