Wetenschap
Op metaaloxide halfgeleider op nanomembranen gebaseerde multifunctionele elektronica voor draagbare-menselijke interfaces
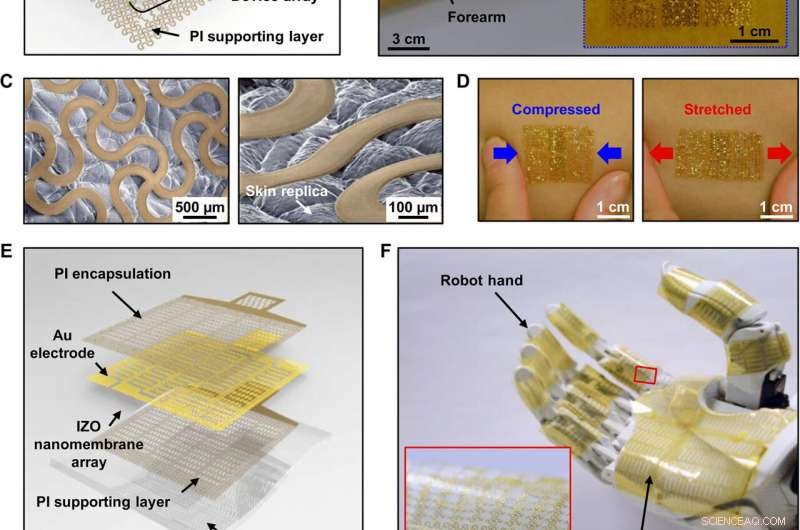
Ultradun, rekbaar, mechanisch onmerkbaar, multifunctioneel HMI-apparaat voor mens en robotica. (A) Schematische geëxplodeerde weergave van een ultradun multifunctioneel HMI-apparaat. (B) optische afbeelding van het apparaat op een menselijke onderarm. Inzet is een vergroot beeld. (C) SEM-afbeelding van het apparaat op een stuk gerepliceerde huid. (D) optische beelden van het apparaat op een menselijke huid onder mechanische vervorming:gecomprimeerd (links) en uitgerekt (rechts). (E) Schematische geëxplodeerde weergave van de temperatuursensorarray voor de robothand. (F) Optisch beeld van de temperatuursensor-array op een robothand. Inzet is een vergroot beeld. (G) SEM-afbeeldingen van de temperatuursensorarray. (H) optische beelden van de temperatuursensorarray op de robothand onder mechanische vervorming:gebogen (links) en uitgerekt (rechts). Fotocredit:Kyoseung Sim, Universiteit van Houston. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aav9653
Draagbare elektronische mens-machine-interfaces (HMI's) zijn een opkomende klasse van apparaten om interacties tussen mens en machine te vergemakkelijken. Vooruitgang in elektronica, materialen en mechanische ontwerpen hebben wegen geboden naar commerciële draagbare HMI-apparaten. Echter, bestaande apparaten zijn oncomfortabel omdat ze de beweging van het menselijk lichaam beperken met trage reactietijden en uitdagingen om meerdere functies te realiseren. In een recent rapport over wetenschappelijke vooruitgang, Kyoseung Sim en een interdisciplinair onderzoeksteam in materiaalwetenschap en techniek, machinebouw, biomedische techniek, elektrotechniek en computertechniek in de VS en China, gedetailleerd de ontwikkeling van een nieuw polymeer.
In productie, ze ontwikkelden een met sol-gel-op-polymeer verwerkt indiumzinkoxide halfgeleider nanomembraan-gebaseerd ultradun, rekbaar elektronica-apparaat. De voordelen waren onder meer multifunctionaliteit, eenvoudige fabricageprocessen, onmerkbare slijtage en robuuste interfacing. De multifunctionele draagbare HMI-apparaten varieerden van resistief willekeurig toegankelijk geheugen (ReRAM) voor gegevensopslag tot veldeffecttransistors (FET's) die gekoppeld waren aan schakelcircuits. Extra functionaliteiten waren onder meer sensoren voor gezondheid en lichaamsbeweging, en microverwarmers om temperatuur te leveren. Na het testen van de afzonderlijke componenten op hun unieke eigenschappen, Sim et al. ontwierp de HMI-apparaten als naadloze wearables voor mensen en ook als prothetische huid voor robots om intelligente feedback te bieden en een gesloten HMI-systeem (human-machine interface) te vormen.
Draagbare mens-machine-interfaces (HMI's) fungeren als directe communicatieroutes tussen mens en machine. De interfaces kunnen fysieke of elektrofysiologische parameters van de dragers detecteren en de machines helpen om overeenkomstige functies uit te voeren. Recente ontwikkelingen in de elektronica, materialen en mechanische ontwerpen hebben geavanceerde HMI-apparaten. Dergelijke wearables zijn, echter, nog steeds halfzacht en oncomfortabel voor naadloze integratie vanwege het onvermogen om te vervormen en zich aan te passen aan een reeks dynamische menselijke bewegingen. Zachte elektronische materialen die perfect passen bij de eisen van interesse bieden een alternatief voor de constructie van de rekbare, draagbare HMI-apparaten. Echter, de zachte rubberachtige materialen hebben langzame reactietijden gekenmerkt om substantiële hysterese te ondergaan bij cyclische vervorming. Ter vergelijking, anorganische materialen kunnen snelle responstijden vertonen en substantiële hysterese ondergaan voor adoptie als draagbare elektronica en sensoren.
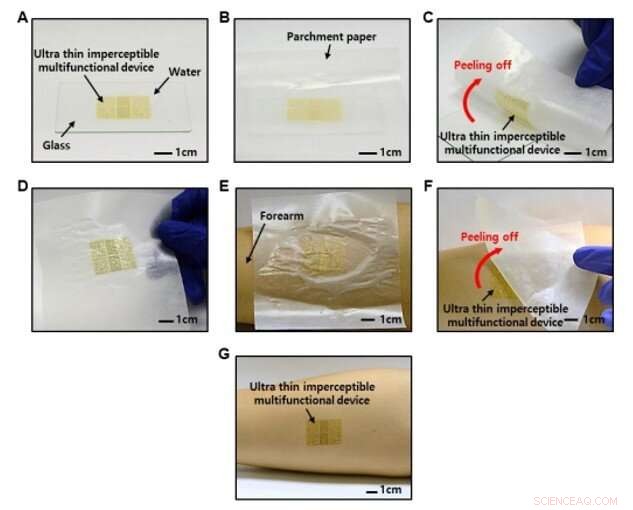
Het ultradunne onmerkbare HMI-apparaat overbrengen naar de menselijke onderarm. (A) Een gefabriceerd apparaat op glas met toegepast water. (B) Perkamentpapier laminering bovenop elektronica. (C) ophalen van het HMI-apparaat door perkamentpapier af te pellen. (D) Een afbeelding van het HMI-apparaat op perkamentpapier. (E) Lamineren perkamentpapier met het HMI-apparaat op de onderarm. (F) Het perkamentpapier afpellen. (G) Een afbeelding van het overgedragen HMI-apparaat op de onderarm. (Photo Credit:Kyoseung Sim, Universiteit van Houston). Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aav9653
Unieke materiaaleigenschappen kunnen kreuken vergemakkelijken, serpentine- en kirigami-vormen om te dienen als belangrijke enablers voor HMI-apparaten met een zacht en rekbaar karakter. Om meerdere functies te bereiken, waaronder detectie, schakelen, stimulatie en gegevensopslag, echter, onderzoekers moeten nog verschillende soorten elektronische functionele materialen ontwikkelen, naast heterogene integratietechnologieën, zoals transferdruk. Dergelijke apparaten worden geassocieerd met complexe fabricageprocedures, onverenigbaarheid van techniek, lage schaalbaarheid en hoge kosten. Aanvullend, om mens- en machine-interfaces te combineren, materiaalwetenschappers hebben een breder begrip nodig van de parameters van interactie, evaluatie en communicatie. Draagbare HMI-apparaten zijn daarom vereist op zowel mensen als machines om effectief gesloten circuits te vormen. Als resultaat, onderzoek op het gebied van robotmaterialen is gericht op het ontwikkelen van draagbare HMI-apparaten om de bestaande hiaten in de technologie te dichten.
In het huidige werk, Sim et al. ontwikkelde een ultradunne, mechanisch onmerkbaar en rekbaar HMI-apparaat voor gebruik op de menselijke huid en op een robot, om fysieke gegevens vast te leggen en respectievelijk intelligente feedback te geven, om een closed-loop HMI-systeem te creëren. Ze ontwikkelden de materialen zonder meerdere functionele materialen te combineren, apparaten of buitensporige heterogene integratiestappen. Het apparaatontwerp op de ultradunne, meanderend, Door de open mesh-configuratie met mechanische rekbaarheid kon de gebruiker zich volledig niet bewust zijn van het apparaat, terwijl het nuttige signalen van de gebruiker heeft geëxtraheerd. Het draagbare apparaat verzamelde signalen van de menselijke spier om de robot rechtstreeks te sturen, zodat de gebruiker de sensaties van de robothand kan voelen. Het onderzoeksteam bestudeerde gezamenlijk de materialen en het ontwerp van het apparaat, fabricage en karakterisering om fundamentele aspecten van het metaaloxide nanomembraan aan te tonen voor multifunctionele toepassingen in HMI-apparaten.
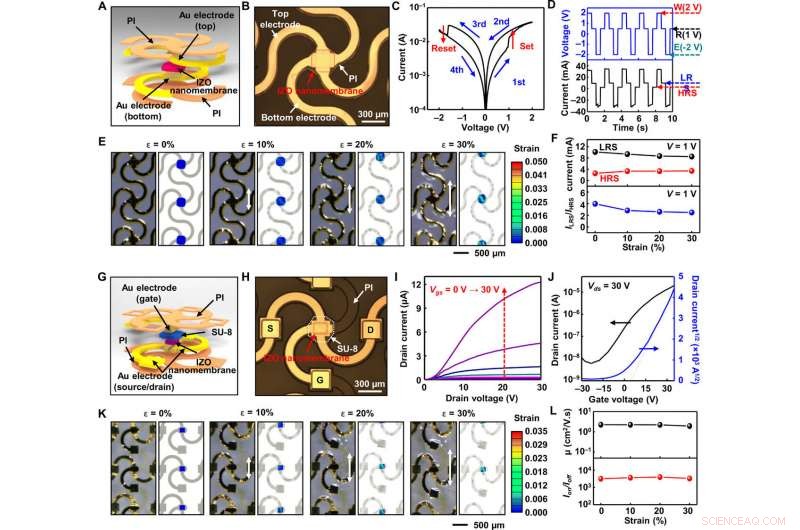
Kenmerken van de ReRAM en FET's. (A) Schematische explosietekening van de op IZO op nanomembraan gebaseerde ReRAM. (B) Optisch microscopisch beeld van de ReRAM. (C) IV-kenmerken van de bipolaire schakeling van de ReRAM. (D) WRER-cyclus van de ReRAM. (E) Sequentiële afbeeldingen van de op IZO-nanomembraan gebaseerde ReRAM onder spanning en overeenkomstige FEA-resultaten van IZO. (F) Stroom bij LRS en HRS en ILRS/IHRS onder spanning. (G) Schematische exploded view van de IZO FET. (H) Optisch microscopisch beeld van de FET. (I) Uitgangskenmerken van de FET. (J) Overdrachtskenmerken van de FET. (K) Sequentiële beelden van de FET's onder spanning en bijbehorende FEA-resultaten van IZO. (L) Berekende veldeffectmobiliteit van de IZO en ION/IOFF van de FET onder spanning. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aav9653
Sim et al. het HMI-apparaat samengesteld met een indiumzinkoxide (IZO) nanomembraan-gebaseerde ReRAM (random-access memory) array, FET-array (veldeffectieve transistor), gedistribueerde temperatuursensoren, UV-sensoren, spanningssensoren en op goud (Au) gebaseerde thermische simulatoren. Ze ontwierpen alle apparaten op een dunne (~ 2 µm) polyimide (PI) laag door spincoating bovenop een stevig glashoudend substraat, zodat het apparaat gemakkelijk los kan worden geplaatst. Na vele ingewikkelde technische stappen, ze voltooiden de fabricage van het apparaat door het onder te dompelen in bufferoxide-etsmiddel (BOE) om het apparaat van het glazen platform los te maken. Perkamentpapier gebruiken, de wetenschappers brachten het apparaat vervolgens zonder extra lijm over op een menselijke arm. Ze gebruikten scanning-elektronenmicroscopie om aan te tonen dat het huidpolymeer bij contact met de huid geen delaminatie onderging. Om een gesloten HMI-systeem tussen mens en machine te vormen, de wetenschappers ontwikkelden op dezelfde manier een prothetische huid bestaande uit poly (dimethylsiloxaan) (PDMS) en een reeks sensoren om sensorische functies van de menselijke huid na te bootsen en implementeerden deze op een robothand.
Sim et al. voerde gedetailleerde karakterisering uit van de sol-gel-on-polymeer-verwerkte IZO nanomembraanoxide halfgeleider, wat de sleutel was om meerdere functionaliteiten te realiseren zonder heterogene integratie. Omdat gegevensopslagapparaten zoals geheugen integrale componenten waren in draagbare HMI's; de wetenschappers construeerden de op IZO-nanomembraan gebaseerde rekbare ReRAM met een Au/IZO/Au-sandwichstructuur met PI (polyimide) inkapseling. Onder voldoende spanning, ze creëerden zuurstofionen en zuurstofvacatures om een geleidende gloeidraad over de twee elektroden te vormen voor een drastische stroomovergang van een hoge weerstandstoestand (HRS) naar een lage weerstandstoestand (LRS). Wanneer ze een spervoorspanning toepasten bij een specifieke spanning, de zuurstofvacatures werden geneutraliseerd, waardoor de geleidende gloeidraad scheurt en de stroom drastisch afneemt. Sim et al. uitgevoerde write-read-erase-write (WRER) cycli en retentietests om de betrouwbaarheid van de op IZO op nanomembraan gebaseerde ReRAM te beoordelen, waar de resultaten een stabiele werking zonder degradatie lieten zien.
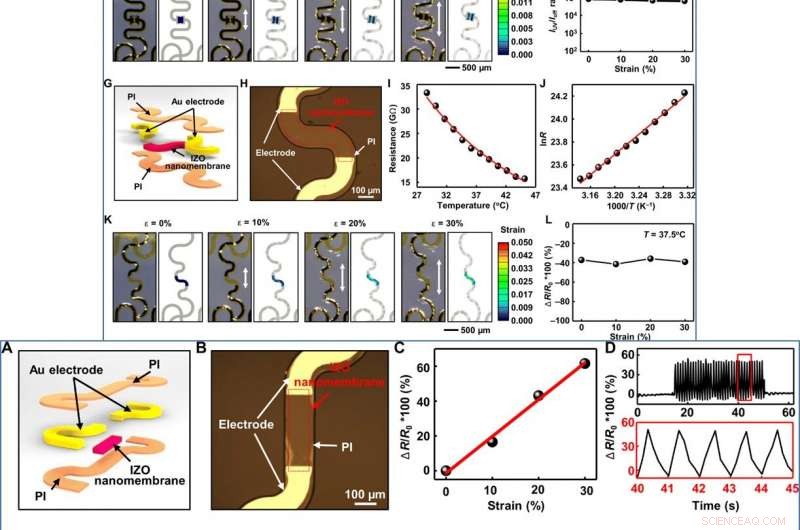
TOP:Eigenschappen van UV- en temperatuursensoren. (A) Schematische exploded view van de IZO nanomembraan-gebaseerde UV-sensor. (B) Optisch microscopisch beeld van de UV-sensor. (C) IV-kenmerken van de UV-sensor. (D) Kalibratiecurve van de IZO UV-sensor. (E) Sequentiële beelden van de UV-sensor onder spanning en bijbehorende FEA-resultaten van IZO. (F) IUV/Idark voor UV-licht onder spanning. (G) Schematische geëxplodeerde weergave van de IZO-temperatuursensor. (H) Optisch microscopisch beeld van de temperatuursensor. (I) Kalibratiecurve van de temperatuursensor. (J) Plot van lnR versus 1000/T van de temperatuursensor. (K) Sequentiële beelden van de IZO-temperatuursensor onder spanning en bijbehorende FEA-resultaten van IZO. (L) Relatieve weerstandsverandering van de temperatuursensor onder spanning. BODEM:Kenmerken van de reksensor. (A) Schematische geëxplodeerde weergave van de IZO-reksensor. (B) Optisch microscopisch beeld van de spanningssensor. (C) Kalibratiecurve van de spanningssensor. (D) Relatieve weerstandsverandering van de spanningssensor onder cyclisch rekken en ontspannen. (E) Sequentiële beelden van de spanningssensor onder spanning en bijbehorende FEA-resultaten van IZO. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aav9653
Ze bevestigden het mechanische spanningseffect op de prestaties van het apparaat door de ReRAM te testen onder verschillende niveaus van mechanisch uitrekken met behulp van een op maat gemaakte brancard. De resultaten toonden aan dat de halfgeleider minimale en verwaarloosbare spanning ondervond wanneer deze werd uitgerekt, als gevolg van het rationele ontwerp van het apparaat. De resultaten wezen op het vermogen van het ReRAM-apparaat om stabiel te functioneren onder mechanische belasting zonder substantiële degradatie. De FET die in het apparaat werd gebruikt, vormde op dezelfde manier een fundamentele bouwsteen voor interface- en schakelelektronica voor HMI's.
De wetenschappers testten vervolgens de ultradunne UV-sensor van het op de huid draagbare polymeer en het vermogen om UV-blootstelling te controleren voor toepassingen om het risico op huidziekten te verminderen. evenzo, ze testten de effecten van huidtemperatuur, een belangrijke gezondheidsindicator door de weerstand van de ultradunne rekbare thermistor bij verschillende temperaturen te meten. Ze berekenden dat de temperatuurcoëfficiënt vergelijkbaar was met in de handel verkrijgbare omvangrijke thermistoren. Het onderzoeksteam ontwikkelde ook een IZO-op nanomembraan gebaseerde spanningssensor voor communicatie tussen een mens en een robot om de veelzijdigheid van het IZO-materiaal te benadrukken. Sim et al. vergeleek de experimentele resultaten met eindige elementenanalyse (FEA) om het spanningsprofiel van het IZO-detectiegebied te berekenen onder verschillende niveaus van mechanisch rekken. De simulaties kwamen goed overeen met de experimentele resultaten.
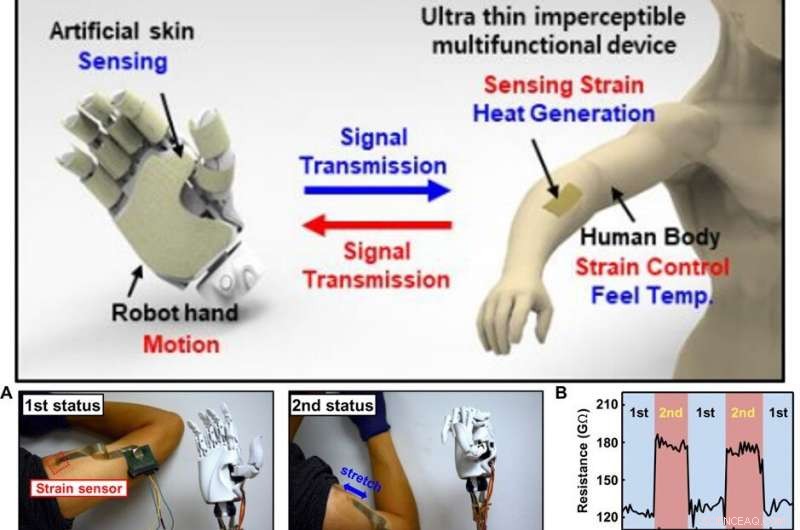
BOVEN:Schematische weergave van een HMI met gesloten lus. BODEM:draagbare HMI met gesloten lus. (A) Representatief beeld van menselijke beweging om de robothand te besturen. (B) Weerstandsverandering van spanningssensor op de menselijke huid onder verschillende menselijke bewegingen. (C) representatief beeld van het nabootsen van menselijke bewegingen. (D) Weerstandsverandering van spanningssensor bij het nabootsen van menselijke bewegingen. (E) representatief beeld van de robothand, waarbij de temperatuursensor de menselijke hand aanraakt. (F) Weerstandsverandering van de temperatuursensor op de robothand terwijl de menselijke hand de robot vasthoudt. (G) Schematische geëxplodeerde weergave van de resistieve microverwarmer. (H) IR-temperatuurtoewijzing van de microverwarmer. (I) Dynamische temperatuurverandering onder verschillende toegepaste spanningen. (J) Kalibratiecurve van de microverwarmer. Fotocredit:Kyoseung Sim, Universiteit van Houston. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aav9653
Na het testen van de afzonderlijke functies van het multifunctionele apparaat, Sim et al. demonstreerde de multifunctionaliteit van de closed-loop interactieve HMI's. Wanneer draagbare sensoren op de menselijke huid signalen detecteerden zoals door inspanning veroorzaakte menselijke beweging, de gedetecteerde signalen kunnen de beweging van de robothand regelen. Bijvoorbeeld, toen het onderzoeksteam de IZO-reksensor op de menselijke schouder plaatste, detecteerde het spanning door beweging van de menselijke arm of wanneer de gebruiker een object vastpakte. parallel, de prothetische huid op basis van de IZO-temperatuursensor van de robothand detecteerde de temperatuur van de externe omgeving of van het vastgepakte object om de geschikte spanning te bepalen die moet worden toegepast op een zachte thermische stimulator op de menselijke huid om de sensatie over te brengen. Op basis van een reeks van dergelijke gecoördineerde interacties, de wetenschappers creëerden een interactief closed-loop HMI-systeem.
Op deze manier, Kyoseung Sim en collega's ontwikkelden een met sol-gel-op-polymeer verwerkt IZO-metaaloxide-nanomembraan en toonden zijn veelzijdigheid ten opzichte van ultradunne zachte geheugenapparaten, transistoren, temperatuur sensoren, reksensoren en UV-sensoren. Ze vormden het multifunctionele apparaat tegelijkertijd in een proces van één stap zonder enige heterogene integratie. De gecombineerde ultradunne rekbare draagbare sensoren met elektronica, prothetische huid en actuator voor mens-robotinterfaces bewezen de haalbaarheid van het HMI-systeem met gesloten lus. Een dergelijke opstelling maakt de weg vrij voor kosteneffectieve, schaalbare productie en draagbare HMI-apparaten die naadloos kunnen worden geïntegreerd met de gebruiker. De wetenschappers stellen zich voor dat de draagbare HMI een essentiële technologie zal worden met verbeterde mogelijkheden, comfort en gemak voor een effectieve samenwerking tussen machines en mensen.
© 2019 Wetenschap X Netwerk
 Nieuwe supercondensors slaan elektrische lading op in textielmaterialen
Nieuwe supercondensors slaan elektrische lading op in textielmaterialen- Molybdeen-titaancarbide levensvatbaar in additieve productie
- Kleine magnetische deeltjes zorgen ervoor dat nieuw materiaal kan buigen, twist, en grijp
- Waarom wordt een zilveren ketting zwart?
- Draadloos oplaadbare solid-state supercondensatoren printen voor zachte, slimme contactlenzen
- 2020 Dead Zone blijft mogelijk vier keer groter dan het in 2001 vastgestelde doel
- NASA ziet ontwikkeling van tropische depressie 03W in de buurt van Yap
- Vroeg smelten van winterse sneeuwval bevordert de Arctische lente
- Koraalverbleking verhoogt het ziekterisico bij bedreigde soorten
- 188, 000 onder evacuatiebevel in de buurt van de dam in Noord-Californië
Hoofdlijnen
- Sociale vaardigheden van honden gekoppeld aan gevoeligheid voor oxytocine
- Antibioticaresistentie:slapende bacteriën die medicamenteuze behandeling kunnen overleven geïdentificeerd
- Rapport benadrukt kansen en risico's in verband met synthetische biologie en bio-engineering
- Haaienvinnenverboden helpen haaien misschien niet, wetenschappers zeggen:
- Gescheiden sinds de dinosauriërs, bamboe-etende lemuren, panda's delen gemeenschappelijke darmmicroben
- Beperkingen van enzymen gebruikt in Forensic Science
- Philadelphia Zoo euthanaseert populaire Aziatische zwarte beer
- Wat is de rol van enzymen in het metabolisme?
- Het verschil tussen craniologie en frenologie
- Kunstmatige controle van exciplexen opent mogelijkheden voor nieuwe elektronica

- Kleine ringlaser detecteert en telt nanodeeltjes nauwkeurig
- Een kwantumsprong in de efficiëntie van nanodeeltjes
- Fluorescerend molecuul zou licht kunnen werpen op de innerlijke werking van de cellulaire omgeving

- Een flexibele, van kleur veranderende film geïnspireerd op de huid van een kameleon


 Hoe de vierkante meters van een kamer te berekenen
Hoe de vierkante meters van een kamer te berekenen- Hoge waterrekeningen kunnen kansarme huurders onbedoeld schaden
- Verscheurd over kolen, Duits dorp worstelt om te genezen
- Golfstroom voor schoon drinkwater
- Nieuw ontwerp voor nachtzichtcamera's die langer meegaan
- Asteroïde-experts vangen laatste glimp op van Solar Orbiter
- Droogte zet aan tot extreme maatregelen om Wests wilde paarden te beschermen
- Hoe werkefficiëntie te berekenen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
