Wetenschap
Hoe Kilobots werken
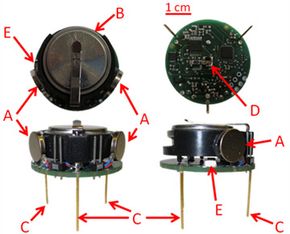 Maak kennis met de Kilobot. Met de klok mee vanaf de linkerbovenhoek, je kijkt naar de top, onderkant, zij- en vooraanzichten, respectievelijk. Je kunt ook de verschillende onderdelen van een Kilobot zien:A) vibratiemotoren, B) lithium-ionbatterij, C) steunpoten, D) infrarood zender/ontvanger en E) LED. Bekijk meer robotfoto's. Afbeelding met dank aan Michael Rubenstein, Nicholas Hoff en Radhika Nagpal
Maak kennis met de Kilobot. Met de klok mee vanaf de linkerbovenhoek, je kijkt naar de top, onderkant, zij- en vooraanzichten, respectievelijk. Je kunt ook de verschillende onderdelen van een Kilobot zien:A) vibratiemotoren, B) lithium-ionbatterij, C) steunpoten, D) infrarood zender/ontvanger en E) LED. Bekijk meer robotfoto's. Afbeelding met dank aan Michael Rubenstein, Nicholas Hoff en Radhika Nagpal Na het hosten van een uiterst leuke achtertuin cookout met vrienden, je begint het minder leuke opruimproces. Ondanks je vastberadenheid, je zult waarschijnlijk een paar kruimels achterlaten - en de overblijfselen van je cookout in de achtertuin zullen waarschijnlijk een van de beste teams van de natuur trekken.
Het begint met een zwerm hongerige mieren die oprukken naar de stapel geplette aardappelchips op het cement. Stuk voor stuk, de mieren verzamelen de kruimels om terug naar het nest te dragen. De kleine insecten werken samen, helpen bij het optillen van stukjes die meerdere keren zo groot zijn. Gezamenlijk optreden, ze bereiken wat één persoon in zijn eentje niet kan.
Wat als we robots zoals deze mieren zouden kunnen ontwerpen, zowel zelfstandig als in een groter geheel kunnen werken? Voor het grootste gedeelte, het creëren van kleine legers van robots is duur en tijdrovend geweest, leidende wetenschappers om zich te houden aan computersimulaties boven het echte werk.
Binnenkomen Kilobots . Onderzoekers van de universiteit van Harvard hebben de kleine bots gemaakt in de hoop een gemakkelijke en goedkope manier te creëren om te testen algoritmen -- of geprogrammeerde stappen om problemen op te lossen -- in een groep van vele robots. Met ingang van maart 2012 de groep had kleine zwermen Kilobots gecreëerd, met een groter doel om een "kilobit" van Kilobots te bouwen:een collectief van 1, 024 personen (en waar het project zijn naam aan ontleent) [bron:Rubenstein].
Deze eenvoudige machines kunnen helpen bij het testen en ontwikkelen van complex gedrag in andere soorten robots. Aanhangers van Kilobot zeggen dat het systeem robots kan verfijnen die mensen vinden en redden uit ingestorte gebouwen of mogelijk helpen bij het opruimen van kleverige oliebollen uit vervuilde omgevingen.
Zie Kilobots als een testvloot:ze zullen niet noodzakelijkerwijs de kwaliteiten bezitten - zoals wielen - die andere machines zullen hebben. Liever, ze zijn de speeltuin waar wetenschappers kunnen experimenteren en eventuele problemen met hun programmering kunnen oplossen voordat ze hun onderzoeksdollars in grotere, complexere robots.
Inhoud
- Een zwerm maken
- Kilobots in actie
- kleine bot, Grote impact
- Opmerking van de auteur
Een zwerm maken
Een robot opdracht geven tot actie kan een makkie zijn, maar een hele groep met dezelfde precisie laten werken is niet zo eenvoudig - of goedkoop.
Een van de grootste voordelen van Kilobots is hun eenvoudige ontwerp en lage prijs. Michaël Rubenstein, die samen met andere onderzoekers van Harvard University de robots heeft helpen ontwikkelen, zegt dat het een prioriteit was om de kosten en de montagetijd laag te houden.
Elk onderdeel heeft een basisgebruik, of het nu beweegt of signaleert naar zijn mechanische vrienden in de buurt. Kilobots zijn uniek omdat ze in de "slaapmodus" blijven totdat ze worden opgeroepen door de overheadcontroller. Een persoon kan een hele zwerm Kilobots "aanzetten" door één signaal uit te zenden -- in plaats van elke robot handmatig "aan" te zetten.
Als een 1,3-inch (33 millimeter) Kilobot is wat je hartje begeert, hier is een basislijst van wat je nodig hebt om er een tot leven te brengen [bronnen:Rubenstein et al., K-Team Corp.]:
- In de omgeving van, printplaat (PCB) die dient als basis van de robot
- Een oplaadbare lithium-ionbatterij, met een levensduur tussen de drie en 10 uur
- Twee trilmotoren die de robot in cirkels en in een rechte lijn verplaatsen (hetzelfde principe dat een mobiele telefoon over een tafel laat bewegen als deze trilt)
- Drie stijve poten voor ondersteuning die de robot ongeveer twee centimeter boven een bepaald oppervlak tillen
- Een multidirectionele infraroodlichtzender en -ontvanger, bevindt zich aan de onderkant van de robot
- Een LED-lamp, in staat om rood te signaleren, groen en blauw
- Een overheadcontroller om berichten uit te zenden via infraroodsignalen binnen een diameter van ongeveer 1 meter onder het apparaat
- Een controlestation -- een computer om commando's in te voeren
- Een laadstation
- Een grotendeels vlak gebied dat ideaal is voor het reflecteren van infrarood licht (meestal een wit oppervlak)
Klaar met die doe-het-zelf? Laten we eens kijken naar wat Kilobots eigenlijk kunnen doen.
Bits en BotsDe onderdelen voor elke Kilobot kosten minder dan $ 15 - ongeveer 10 keer goedkoper dan de goedkoopste collectieve robots vanaf 2012 [bron:Rubenstein et al.]. Een robot heeft ongeveer vijf minuten nodig om te monteren. En voor de programmeer- en robotica-experts die er zijn, de blauwdruk voor deze basisrobots is open source, wat betekent dat de stappen voor iedereen beschikbaar zijn. Een bedrijf genaamd K-Team Corporation verkoopt ook geassembleerde Kilobots.
Kilobots in actie
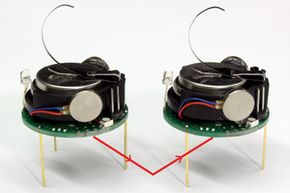 De Kilobot aan de linkerkant zendt een signaal uit door het van de tafel naar de Kilobot aan de rechterkant te laten stuiteren, die het ontvangt. Afbeelding met dank aan Michael Rubenstein, Nicholas Hoff en Radhika Nagpal
De Kilobot aan de linkerkant zendt een signaal uit door het van de tafel naar de Kilobot aan de rechterkant te laten stuiteren, die het ontvangt. Afbeelding met dank aan Michael Rubenstein, Nicholas Hoff en Radhika Nagpal We zeiden het al eerder. We zeggen het nog een keer:Kilobots zijn ontworpen om de ultieme algoritmetesters te zijn.
Laten we zeggen dat hulpverleners robots ter plaatse willen brengen voor een zoek- en reddingsmissie. Ze moesten weten hoe goed de machines met elkaar konden communiceren. Dit is waar Kilobots vooral handig zijn als testdummies.
Elke robot kan een infraroodsignaal van de grond weerkaatsen naar een andere bot ernaast, waardoor het kan voelen waar het is in relatie tot anderen in de zwerm (zie afbeelding). Het stuiteren van dat signaal kan er ook voor zorgen dat iemands robotachtige buren op dezelfde pagina staan voor wanneer en hoe een taak moet worden uitgevoerd. Weten waar andere robots zijn, is essentieel als het gaat om het lokaliseren van objecten in een bepaalde omgeving en om ze terug te brengen naar de thuisbasis.
Tot dusver, er zijn drie fundamentele zwermgedragingen die Kilobots onder de knie hebben:foerageren, formatiecontrole en synchronisatie.
foerageren is hoe het klinkt:verschillende robots opdracht geven om zich te verspreiden en het gebied om hen heen te verkennen. Met Kilobots, het idee is om de tijd die nodig is om op een bepaalde locatie te foerageren te verminderen. Hier komt het signaleren naar anderen in de zwerm goed van pas. Michaël Rubenstein, een onderzoeker die hielp bij het ontwerpen van de robots, zegt dat foerageren als groep veel efficiënter is dan individueel, vooral in urgente situaties.
"Als er een ingestort gebouw is door een aardbeving, en er zit een persoon vast in dat gebouw -- als je een enkele robot stuurt, kan het veel langer duren om die persoon te vinden dan wanneer je een grote groep robots stuurt om die persoon te vinden, " zegt hij. Hoewel een ingestort gebouw en een flat, whiteboard zijn totaal verschillende omgevingen, de algoritmen die worden gebruikt om door beide te navigeren, zijn vergelijkbaar.
Een ander belangrijk onderdeel van effectieve zwermen is: formatie controle , het vermogen om zich eenstemmig of in een specifiek deel van de zwerm te gedragen. Door met elkaar in gesprek te blijven, Kilobots beschikken over een virtuele peilingssensor die iedereen een realistisch beeld geeft van zijn positie in de groep. In plaats van hardware te gebruiken om dit te bereiken, Kilobots doen het met basissoftware en meer geavanceerde algoritmen. Complex gedrag uitvoeren met zo min mogelijk hardware omvat de geest van Kilobots.
In een systeem waar elke robot op dezelfde pagina moet staan, synchronisatie zaken. Als een deel van de zwerm een bepaalde tijd een taak moet uitvoeren en daarna naar een andere seconde moet overschakelen, de hele groep moet dezelfde interne klok hebben. Een manier om dit te visualiseren is om je een zwerm van 1 voor te stellen, 000 Kilobots, waarbij elk zijn LED-licht gebruikt om een pixel weer te geven in een grotere video die van bovenaf kan worden bekeken. Om te weten welke kleur op een bepaald moment moet worden gesignaleerd, elke Kilobot moet dezelfde klok gebruiken.
kleine bot, Grote impact
Hoewel het academische schatjes zijn, Kilobots zijn veelbelovend in de echte wereld, te. Het zijn een soort tekentafels. Stel dat een geïnspireerde onderzoeker droomt van het bouwen van een zwerm insectenrobots om gewassen te bestuiven. Hij of zij zou baat hebben bij het eerst testen van Kilobots.
De kleine bots kunnen ook licht werpen op zwerm intelligentie , of het collectieve gedrag van een groep, en hoe je grote bendes robots beter kunt managen.
Neem collectief vervoer, bijvoorbeeld. Mieren gebruiken het gedrag om voedsel (zoals die kruimels van aardappelchips) terug naar hun nest te dragen. Onderzoekers hebben geleerd dat bepaalde individuen - mieren en robots - een speciale rol spelen in het proces. Sommigen kunnen een kettingachtig pad creëren dat verzamelaars terugleidt naar het nest, terwijl anderen de leiding hebben om samen te werken om het object van de ene plaats naar de andere te dragen. In de Kilobot-arena, het testen van hetzelfde principe zou schoolrobots kunnen helpen bij het opsporen en opruimen van rommel in een bepaalde omgeving - zoals olielekkages, bijvoorbeeld.
Ze kunnen ook handig zijn voor het maken van betere kaarten of snapshots van omgevingen. De robots zouden dit kunnen doen door een gebied te verkennen en ter referentie een ruimtelijke kaart te maken. Andere opdrachten zijn onder meer bestuiving van gewassen of toonaangevende zoek- en reddingsoperaties [bron:Rutter].
Michaël Rubenstein, een van de wetenschappers die Kilobots heeft gemaakt, zegt dat toekomstig onderzoek zich zal richten op het bedenken van nieuwe algoritmen die het gemakkelijker maken om de zwerm te beheersen. De robots programmeren om collectieve transportactiviteiten uit te voeren en manieren vinden om bruikbare vormen van de robots te maken (zoals het ingestorte deel van een gebouw, bijvoorbeeld) blijven prioriteiten. Wie weet, misschien zullen Kilobots robots inspireren die lijken op de sciencefictionfavorieten Transformers. Het idee is om slimme, kleinere robots die verbinding kunnen maken om een grotere, krachtiger.
Nog altijd, Rubenstein zegt dat er genoeg ruimte is voor verbetering. Het bouwen van een 1, 000 robotzwerm heeft tijd gekost. En hoewel Kilobots zichzelf kunnen corrigeren, ze missen precisie bij het reizen op langere afstanden.
Opmerking van de auteur
Mieren zwermen naar een object dat meerdere keren zo groot is en pakken het moeiteloos op (of zo lijkt het). Maar er is een hele communicatielaag die we missen als we niet goed kijken. Als we intelligente machines willen met vergelijkbare mogelijkheden, we moeten wat tips uit de natuur halen. Wat me het meest verbaasde toen ik over Kilobots schreef, waren niet de robots zelf, maar het detailniveau dat nodig is om programma's en algoritmen te laten werken. Kilobots scheren alleen het oppervlak als het gaat om de fascinerende ideeën die onderzoekers aan het testen zijn. Deze kleine, mechanische legers herinneren eraan hoe netjes en complex de wereld is, en hoe het proberen te begrijpen het halve plezier is.
gerelateerde artikelen
- 10 robots met vuile banen
- Hoe hebben robots de productie veranderd?
- Hoe militaire robots werken
- Hoe politierobots werken
- Hoe robotlegers zullen werken
- Hoe robotchirurgie zal werken
- Hoe robots werken
- Hoe Rumble-robots werken
- Top 5 groene robots
- Zullen robots ons veranderen?
- Gaan robots trouwen?
bronnen
- K-Team mobiele robotica. "Kilobot." (10 maart, 2012) http://www.k-team.com/mobile-robotics-products/kilobot/introduction
- Rubenstein, Michaël. "Hoe Kilobots werken." Persoonlijk interview. 13 maart, 2012.
- Rubenstein, Michaël, et al. "Kilobot:een goedkoop schaalbaar robotsysteem voor collectief gedrag." Technisch rapport. 2011. (10 maart, 2012).ftp://ftp.deas.harvard.edu/techreports/tr-06-11.pdf
- Rutter, Michaël Patrick. "Kilobots verlaten het nest!" Harvard School of Engineering en Toegepaste Wetenschappen. 21 november 2011. (10 maart, 2012). http://www.seas.harvard.edu/news-events/press-releases/kilobots-are-leaving-the-nest

Hoofdlijnen
- Hoe doorlatendheid te berekenen
- Hoe vergif Sumac te behandelen?
- Vijf belangrijke orgaansystemen van het lichaam
- Kan ik een medicijn nemen om een bepaalde herinnering uit te wissen?
- Wat is vriesbreuk en waarom is het nuttig in celbiologie?
- Hoe dopamine helpt om sommige voedingsmiddelen verslavend te maken
- Hoe lijken mitochondriën en chloroplasten op bacteriën?
- Cytoplasma: definitie, structuur en functie (met diagram)
- Hoe het Human Microbiome-project werkt






 10 luchtvaartinnovaties die zonder op de grond blijven zitten
10 luchtvaartinnovaties die zonder op de grond blijven zitten - Hoe wordt water gevormd tijdens cellulaire ademhaling?
- Kenmerken van een droog klimaat
- Wetenschappers hebben net een medisch hulpmiddel uitgevonden dat voor u kan ruiken - Ja, echt
- Hoe beïnvloeden oceaan- en windstromen weer en klimaat?
- Wat is het verschil tussen de troposfeer en de stratosfeer?
- Waarom produceren citrusvruchten elektriciteit?
- Wat gebeurt er als een weerstand opbrandt?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
