Wetenschap
Zeer nauwkeurig positioneringssysteem voor zichtbaar licht binnenshuis met gebruik van niet-line-of-sight-methode

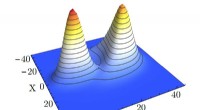
Het model van binoculaire stereovisie. Tegoed:Optics Express (2022). DOI:10.1364/OE.470391
Locatiegebaseerde diensten worden steeds belangrijker in binnenomgevingen met de ontwikkeling van Internet-of-thing (IoT)-technologieën. Het systeem voor positionering van zichtbaar licht (VLP) biedt een groot potentieel vanwege de immuniteit voor door radiofrequentie geïnduceerde elektromagnetische interferentie, een vrij en onbeperkt spectrum en een veel hoger beveiligingsniveau.
Onlangs is veel onderzoek naar line-of-sight (LOS) VLP aangetoond met hoge nauwkeurigheid tegen zeer lage kosten. Voor LOS VLP is blokkeren en schaduwen echter een groot probleem; en er is behoefte aan grote aantallen LED's. Er zijn maar weinig methoden onderzocht om dit probleem op te lossen.
In een studie gepubliceerd in Optics Express , stelde de groep van Dr. Lin Bangjiang van het Fujian Institute of Research on the Structure of Matter van de Chinese Academie van Wetenschappen een non-line-of-sight (NLOS) VLP-systeem voor met behulp van een verrekijker en een enkele lichtgevende diode (LED) . Het kan een zeer nauwkeurige 3D-positionering van een willekeurige houding realiseren door de gereflecteerde lichten van de vloer.
De onderzoekers stelden een systeemmodel voor dat bestaat uit twee functiemodules:een NLOS optische cameracommunicatie (OCC) module en een binoculaire stereovisiemodule. De eerste gebruikt de reflecties om de coördinaatinformatie van de LED te ontvangen door een verbeterd OCC-signaalherstelmodel. En de latere schat de positie van de camera door een voorgesteld binoculair positieschattingsalgoritme, dat gebaseerd is op de principes van binoculair stereovisie.
Vervolgens stelden ze een foutcompensatie-algoritme voor om de fout van het systeem op de z-as te optimaliseren, wat het belangrijkste probleem is over diepteschatting voor de binoculaire camera dat de fout op de z-as veel groter is dan die op de x en y assen.
Bovendien ontwierpen de onderzoekers een experimenteel testbed en kozen ze een STM32-microcontrollereenheid om een LED aan te sturen. Bij de ontvanger gebruikten ze een verrekijkercamera om het gereflecteerde licht van de grond vast te leggen in twee verschillende belichtingsstanden (een lange en een korte).
Ze verkregen de LED-positie door de NLOS OCC-module met behulp van het beeld met korte belichtingstijd en kregen de pixelcoördinaten van de projectie van de LED die door de grond werd gereflecteerd in het beeld met lange belichtingstijd. Een traagheidsmeeteenheid wordt samen met de verrekijker bevestigd om de pose te meten.
Met deze informatie berekenden de onderzoekers de fout tussen de geschatte waarde en de gemeten waarde van de positie van de camera.
Deze studie overwint de uitdaging van het schaduwen/blokkeren van de LOS-links, realiseert 3D-arbitraire houdingspositionering met het minimum aantal bakens (alleen enkele LED), en verbetert de uitvoerbaarheid van VLP aanzienlijk. + Verder verkennen
Op verrekijker gebaseerde UAV's autonoom tankplatform - piloten zijn niet langer nodig
 Kooldioxide verwijderen uit uitlaatgassen van elektriciteitscentrales
Kooldioxide verwijderen uit uitlaatgassen van elektriciteitscentrales- Microcapsules voor gerichte toediening van medicijnen, geïnspireerd op Russische pelmeni
- Chiraliteit in realtime volgen
- Nieuw ontdekt quasikristal werd gecreëerd door de eerste nucleaire explosie op Trinity Site
- Van atoom tot natural killer cel:het verhaal van een onverwachte eiwitstructuur
- Hoe een taaie struik de honger in Afrika kan helpen bestrijden
- Oceanen kunnen een minder efficiënte koolstofput worden
- Smelten van poolijs verschuift de aarde zelf, niet alleen zeespiegel
- Wat zijn drie aanpassingen die reptielen hebben voor het behoud van water?
- Variabiliteit van koude temperaturen belangrijk bij het evalueren van klimaatverandering
Hoofdlijnen
- Is diepgevroren kabeljauw net zo lekker als vers?
- (Her)verwerven van het potentieel om alles te worden
- Wetenschappers bewerken vlindervleugelvlekken en strepen
- Honden en wolven delen parasieten
- De nanoscopische structuur die onze genen opsluit
- Vijf gunstige effecten van micro-organismen
- Hoe elektroforese te analyseren
- Inheemse vissoorten lopen gevaar na verwijdering van water uit de Colorado-rivier
- Resultaten van Landmark NASA DNA Twin Study zijn binnen




 Modulatie tot sonoluminescentie bereikt in aanwezigheid van koolstofnanopunten in water
Modulatie tot sonoluminescentie bereikt in aanwezigheid van koolstofnanopunten in water- Ontwerpmateriaal om plastic buiten de vuilstort te houden
- Onderzoekers stellen flexibele druksensor voor voor interactie tussen mens en machine
- Bereken brouwerijen Angle
- Luchthaven Shanghai automatiseert inchecken met gezichtsherkenning
- Klein plankton herstelt traag na botsing met asteroïden die dinosauriërs doden
- Van jeans tot vezels tot kledinglabels - nieuwe recycling voor duurzamere mode
- Waarom ramen met uitzicht zo belangrijk zijn voor oudere mensen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
