Wetenschap
Vormprogrammeerbare diëlektrische actuatoren van vloeibaar kristalelastomeer
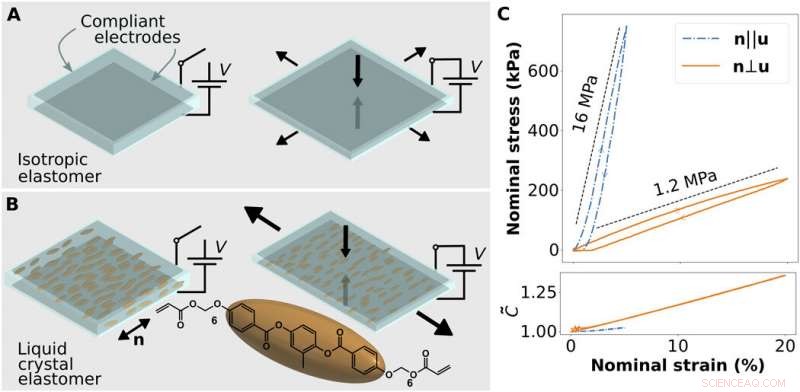
Apparaatschema, mechanisch, en elektrische karakterisering. (A) Schematische voorstelling van een traditionele isotrope DE-actuator in uit en aan staten. (B) Schematische voorstelling van een uniaxiaal uitgelijnde diëlektrische LCE-actuator (DLCEA) in uit- en aan-toestanden. Moleculaire uitlijning met vloeibare kristallen; de regisseur, N, wordt aangegeven door een tweekoppige pijl en definieert de stijvere richting van de LCE. Wanneer geactiveerd door een spanning, V, het materiaal verdunt en rekt loodrecht op de uitlijning meer dan evenwijdig aan de regisseur. (C) De mechanische spanning van DLCEA en de reactie van de genormaliseerde capaciteit (C∼) op spanning over het lineaire DLCEA-regime worden gekenmerkt met een spanningssnelheid van 0,1% per seconde. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay0855
Materiaalwetenschappers willen bio-geïnspireerde zachte robots gebruiken om geavanceerde interacties tussen mensen en robots uit te voeren, maar de bijbehorende technologie moet nog worden ontwikkeld. Bijvoorbeeld, zachte actuatoren moeten snel en krachtig presteren om programmeerbare vormveranderingen te leveren en de apparaten moeten gemakkelijk te fabriceren en energiezuinig zijn voor ongebonden toepassingen. In een nieuw verslag over wetenschappelijke vooruitgang , Zoey S. Davidson en een interdisciplinair onderzoeksteam in de afdelingen Fysieke Intelligentie, Materiaalkunde en techniek, en de School of Medicine in Duitsland, VS en Turkije, combineerde verschillende interessante kenmerken met behulp van twee verschillende systemen met actieve materialen om zachte robots te bouwen.
De wetenschappers integreerden snelle en zeer efficiënte bediening met diëlektrische elastomeren (DE) en gerichte vormprogrammering met behulp van vloeibare kristalelastomeren (LCE). Met behulp van top-down foto-uitlijningstechnieken, ze programmeerden vervolgens moleculaire uitlijning en gelokaliseerde gigantische elastische anisotropie in de vloeibare kristalelastomeren. De onderzoekers ontwikkelden lineair aangedreven monolieten van vloeibaar kristal-elastomeer met reksnelheden van meer dan 120 procent, per seconde, en een energieconversie-efficiëntie van 20 procent bij het verplaatsen van lasten van meer dan 700 keer het gewicht van het elastomeer. Het mechanisme zal nieuwe onderzoeksmogelijkheden mogelijk maken in geminiaturiseerde vormprogrammeerbaarheid en efficiëntie, naast grotere vrijheidsgraden voor toepassingen in zachte robotica in multidisciplinair onderzoek.
Materiaalrobotica-onderzoekers beschouwen conforme actuatoren als de ontbrekende sleutel om efficiënte mens- en robotinterfaces te vormen. Conforme zachte actuatoren zijn idealiter zeer efficiënt, handhaaf de sterkte-gewichtsverhouding, werkcapaciteit en vorm programmeerbaarheid om complexe functies te voltooien. Zachte actuatoren met dergelijke eigenschappen zullen net als een kunstmatige spier presteren met geavanceerde toepassingen in de lucht- en ruimtevaart, robotica, medische apparatuur, apparaten voor het oogsten van energie en in wearables. Onder de variëteiten van onderzochte zachte actuatoren, diëlektrische elastomeren (DE's) zijn de meest veelbelovende. parallel, vloeibare kristalelastomeren (LCE's) kunnen omkeerbare mechanische vervorming ondergaan met behulp van licht en thermische activering nabij de faseovergangstemperatuur. Vooruitgang in foto-uitlijning en microfabricage hebben wetenschappers in staat gesteld de uitlijning van vloeibare kristallen in microscopische gebieden voor te programmeren voor complexe vormverandering. Echter, bestaande mechanismen vereisen fabricagemethoden in meerdere stappen, terwijl de inspanningen om elektrische energie over te brengen naar mechanisch werk met behulp van LCE beperkt zijn vanwege de kleine belasting die ze genereren.
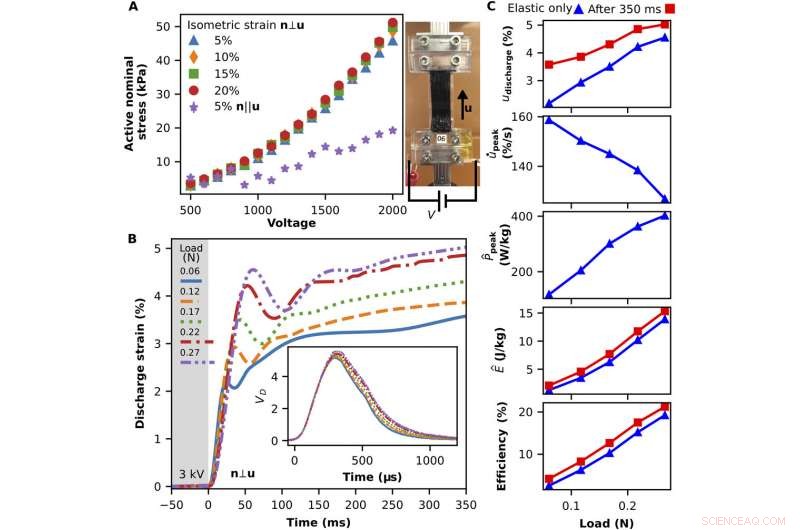
Karakterisering van uniaxiale DLCEA demonstreert de mogelijkheden van een DLCEA-actuatorapparaat. (A) Isometrische (constante rek) tests. Gemeten actieve nominale spanningsvermindering met verschillende initiële isometrische spanningen (u) voor apparaten die zijn geassembleerd met de LCE-director n⊥u en n‖u en een foto van een geassembleerd DLCEA-apparaat met n⊥u. (B) Isotone (constante kracht) tests. Contractiele ontladingsspanningstrajecten onder verschillende belastingen gemeten door een hogesnelheidscamera met activeringsspanningen van 3 kV. Inzet:De bijbehorende metingen van elektrische ontlading. (C) Fundamentele actuatorkenmerken worden berekend op basis van het contractietraject en meting van de ontlaadstroom die wordt gevonden in (B), inclusief stam (u), piekbelasting (u˙peak), piek specifiek vermogen (Pˆpeak), specifieke energie (Eˆ), en efficiëntie. Fotocredits:Zoey S. Davidson. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay0855
In het huidige werk, Davidson et al. patroon LCE (vloeibare kristalelastomeren) om ruimtelijke variatie van mechanische compliantie aan te passen (overdracht van een invoerkracht en verplaatsing door elastische lichaamsvervorming) en om effectievere diëlektrische elastomeeractuators te ontwikkelen met voorprogrammeerbaarheid en richting van activering (compressie). In het algemeen, DE (diëlektrisch elastomeer) actuators werken met behulp van elektrostatische aantrekking tussen twee meegevende elektroden die aan weerszijden van een isotrope DE zijn gemaakt om een variabele weerstand-condensator te construeren. Hoogspanning die op de buigzame elektroden wordt toegepast, kan een elektrostatische druk induceren die bekend staat als Maxwell-spanning om de DE te vervormen; voor elektrische bediening. Dit mechanisme kan een hogere operationele efficiëntie en een hogere activeringssnelheid produceren dan die van LCE's. Echter, ondanks enkele indrukwekkende resultaten, DE-actuatoren zijn nog niet wijdverbreid gebruikt in zachte robotica vanwege bestaande uitdagingen die kunnen worden overwonnen met behulp van innovatieve materialen om de volgende generatie te bouwen, krachtige DE's met vormprogrammeerbaarheid.
Davidson et al. direct de grote mechanische anisotropie (om de spanningslokalisatie te verbeteren) van LCE-materialen onderzocht met behulp van elektrische aandrijving, zonder afhankelijk te zijn van moleculaire rotatie. Ze omvatten recente vorderingen in de materiaalwetenschap om zeer efficiënte en vormprogrammeerbare DE's te bouwen; aangeduid als diëlektrische LCE-actuators (DLCEA). De wetenschappers hebben LCE-moleculen in lokale domeinen uitgelijnd om elektrisch aangedreven activering te bereiken en vormverandering bij kamertemperatuur mogelijk te maken om grote, snelle en krachtige soorten.
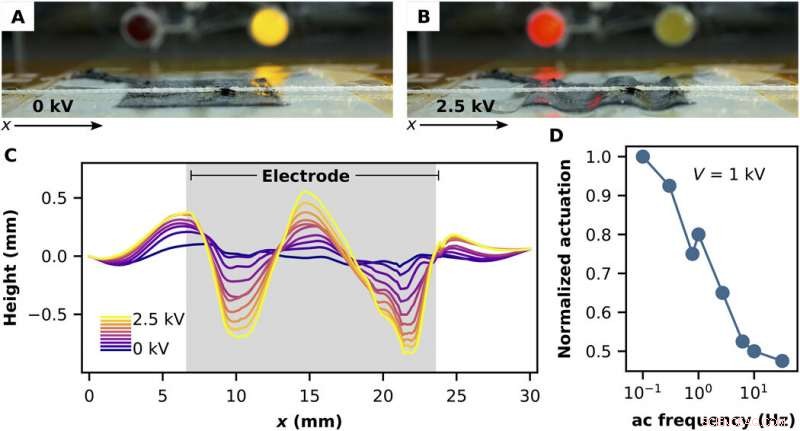
Uniaxiale out-of-plane knik DLCEA. (A) Uit en (B) op toestanden van een uniaxiaal DLCEA-apparaat met vaste randvoorwaarde. Uitzetting langs de zachte richting zorgt voor knikken buiten het vlak, die een fijne draad verplaatst die strak over het oppervlak wordt gehouden. (C) Experimentele meting van knik als functie van de aangelegde spanning. (D) Frequentierespons van knik uniaxiale DLCEA bij 1 kV. De activeringsamplitude van 0,1 Hz is ongeveer 130 m. Fotocredits:Zoey S. Davidson. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay0855
Het onderzoeksteam ontwikkelde de LCE-films in een proces van twee stappen; eerst, ze ontwikkelden kort een oligomeer, gevolgd door LCE-filmfabricage met behulp van een thiol-acrylaatklikreactie. Ze stemden de exacte verhouding van componenten af, de keuze van monomeer en dithiol linker, om de gewenste mechanische eigenschappen van de uiteindelijke LCE-film aan te passen. Het werk produceerde grote gebieden van goed geordende uniaxiale LCE met grote elastische anisotropie. De wetenschappers hebben aan beide zijden van de LCE-film conforme vetelektroden aangebracht om de DLCEA-apparaten (diëlektrische LCE-actuator) te creëren.
Davidson et al. vervolgens gekarakteriseerd (getest) de materialen beginnend met monodomein uniaxiaal uitgelijnde LCE-films. Volgende, ze testten de uniaxiale DLCEA's in isometrische (constante rek) en isotone (constante kracht) configuraties. Bijvoorbeeld, tijdens isometrische tests, ze pasten aanvankelijke spanningen toe op DLCEA-apparaten en lieten ontspanning toe voordat een hoge spanning werd toegepast voor elektrische bediening. Tijdens isopotentiaaltests (waarbij elk punt in een regio of ruimte dezelfde potentiaal heeft), de wetenschappers spanden de DLCEA onder een constante spanning om de verwachte activering aan te geven.
Demonstratie van uniaxiale knik DLCEA. Een uniaxiaal uitgelijnde DLCEA knikt wanneer geladen door een potentiaal van 2,5 kV en wordt vervolgens vlakker wanneer de elektroden worden ontladen. De snaar die over de DLCEA wordt vastgehouden, helpt om de bediening te visualiseren, maar wordt ook enigszins verplaatst door de knik. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay0855
Met dezelfde DLCEA, het onderzoeksteam voerde isotone tests uit door verschillende gewichten aan het vrije uiteinde van het apparaat te hangen om constante belastingskrachten en initiële nominale spanningen te genereren. Vervolgens ontlaadden ze abrupt het gewogen DLCEA-apparaat en legden de daaropvolgende beweging vast met behulp van een high-speed video. Naarmate de experimentele belasting en rek toenam, de capaciteit van DLCEA nam toe.
Tijdens complexe vormactivering, randvoorwaarden speelden een belangrijke rol bij het bepalen van de vormverandering van DLCEA. Het onderzoeksteam begreep de rol van randvoorwaarden door het knikeffect te karakteriseren dat wordt veroorzaakt door de uitzetting van het elastomeer tussen vaste grenzen, ze observeerden toenemende knikamplitude met toenemende spanning. De activeringspiek was ook een ander interessant kenmerk voor DLCEA-toepassingen, de wetenschappers maten de verandering in activeringsamplitude als een functie van de toegepaste frequentie met behulp van een sinusoïdaal variërende 1-kV-potentiaal. Hoewel de activeringsamplitude exponentieel afnam met de frequentie, de onderzoekers maten de parameters (50 µm) bij 30 Hz en 1 kV.
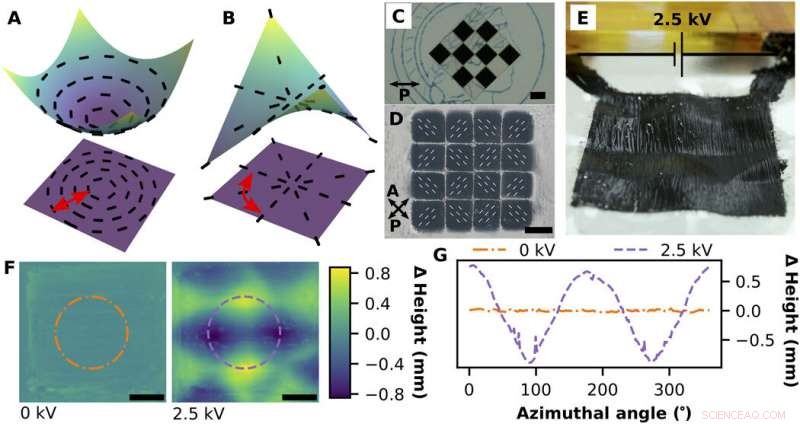
Gepixelde DLCEA. Geprogrammeerde vormactivering, zoals een vervorming van het kuiltjepatroon, is mogelijk door de configuratie van de directeur te modelleren in een azimutaal-radiaal defectrooster. (A) Azimutale defecttypen vervormen tot een kegel met lokaal positieve Gauss-kromming, en (B) typen radiale defecten vervormen tot een anti-kegel met lokaal negatieve (zadelachtige) Gauss-kromming. In (A) en (B), de tweekoppige rode pijlen geven de zachte richting aan. (C) De defecten zijn van een patroon voorzien met behulp van een gepixelde reeks polariserende films met de ontworpen lokale oriëntaties. (D) bekeken door gekruiste polarisatoren, de gefabriceerde LCE-film heeft een gepixelde uniaxiale uitlijning, aangegeven door gestippelde witte lijnen, een defect rooster vormen. (E) Wanneer opgeladen tot 2,5 kV, er is een grote zichtbare vervorming van het oppervlak. (F) De profilometrie gemeten hoogtekaart van de met vet bedekte LCE is bijna vlak zonder lading en varieert meer dan 1,6 mm wanneer opgeladen tot 2,5 kV. De streep-punt en streep cirkels in (F) zijn sporen van hoogte afgebeeld in (G). De verandering van ongeveer constante hoogte naar een sinusoïdaal variërende hoogte duidt op een verandering in teken van de lokale Gauss-kromming. Schaalbalken, 4mm. Fotocredits:Zoey S. Davidson. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay0855
Om vervolgens het vermogen te demonstreren om complexe patronen in 2D voor te programmeren, gevolgd door elektrische activering van de films in 3D-vormen, de wetenschappers ontwierpen ruimtelijk variërende LCE-regisseurconfiguraties. Ze zagen dat de LCE-film uit het vlak knikte met lokaal positieve of negatieve Gauss-kromming om kegels of anti-kegelvervorming in elastische media te vormen. Davidson et al. observeerde de lokaal geprogrammeerde hoogteverandering en de bijbehorende vorming van Gauss-kromming in het experimentele apparaat. De onderzoekers schrijven de waargenomen hoge efficiëntie in het systeem toe aan de anisotropie van de elastische modulus en de Poisson-verhouding. De anisotropie van de Poisson-verhouding is een belangrijk kenmerk dat geprogrammeerde vormverandering mogelijk maakt. Door mechanisme, de geactiveerde of gecomprimeerde LCE kan dwars uitzetten om een vormverandering te creëren. De experimentele methode die in dit werk is ontwikkeld, kan worden gegeneraliseerd om een grote verscheidenheid aan programmeerbare vormveranderingen te creëren. Bijgevolg, wanneer een elektrisch veld wordt toegepast op de DLCEA, het apparaat kan verdraaide bewegingen maken, waarbij de grootte zal afhangen van de intrinsieke eigenschappen van het materiaal en van de LCE-geometrie.
Op deze manier, Zoey S. Davidson en collega's combineerden de gewenste kenmerken van DE's en LCE's binnen een enkel materiaalplatform om elektrisch aangedreven DLCEA's te vormen met superieure activeringsprestaties. De apparaten vertoonden een hoge energieconversie-efficiëntie (20 procent), een hoge activeringssnelheid (120 procent per seconde) en programmeerbare vormverandering van 2D naar 3D met meer dan 1, 800 procent out-of-plane slag. Voor grotere bedieningskrachten, het onderzoeksteam overweegt meerlagige DLCEA-stacks.
De inzichten die in dit werk worden verschaft in technieken voor de integratie van actieve materialen en mechanismen van elektro-aansturing kunnen meer opwindende mogelijkheden bieden. De methoden kunnen worden gekoppeld aan 3D-printen, origami en kirigami activeringsstrategieën om multifunctionele zachte robots te creëren met goedkope en duurzame materialen als zuinige uitvindingen. Het ontwikkelde mechanisme kan ook worden toegepast op andere technologieën zoals het oogsten en opslaan van energie, voor medische apparaten, draagbare technologie en ruimtevaart.
© 2019 Wetenschap X Netwerk

Hoofdlijnen
- Ter verdediging van kamsalamanders - waarom deze ongrijpbare amfibieën de moeite waard zijn?
- DNA-bewijs zet neushoornstropers achter tralies, studie toont
- Nieuwe methode voor het planten van citrusvruchten stopt insecten, levert extra voordelen op
- Human Heart Science Projects
- Rechtbank vindt het goed om een soort uil te doden om het effect op andere uilen te zien
- Hogere biodiversiteit door rivierverruimende maatregelen
- Onderwaterkwekerijen helpen de mediterrane visbestanden nieuw leven in te blazen
- Zien in het donker - hoe plantenwortels water waarnemen door middel van groei
- Uitgebreide quota voor blauwvintonijn kunnen het herstel ongedaan maken:wetenschappers





 Moleculaire zuurstof gedetecteerd in de dichtstbijzijnde quasar
Moleculaire zuurstof gedetecteerd in de dichtstbijzijnde quasar- De dingen van het universum blijven veranderen
- Zeespiegelstijging door ijskappen volgt scenario voor klimaatverandering in het slechtste geval
- Gebrek aan diversiteit betekent box-office blues voor Hollywood-films, studie toont
- Alfred Russel Wallace: Biography, Theory of Evolution & Facts
- Hoe maak je een papieren bord Mars
- Een slimme elektrische scooter om de stedelijke mobiliteit te verbeteren
- Kids Science Projects on Things That Smelt
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Norway | Swedish | Danish |

-
Wetenschap © https://nl.scienceaq.com
