Wetenschap
Kunstmatige vinger die oppervlaktemateriaal kan identificeren met een nauwkeurigheid van 90%
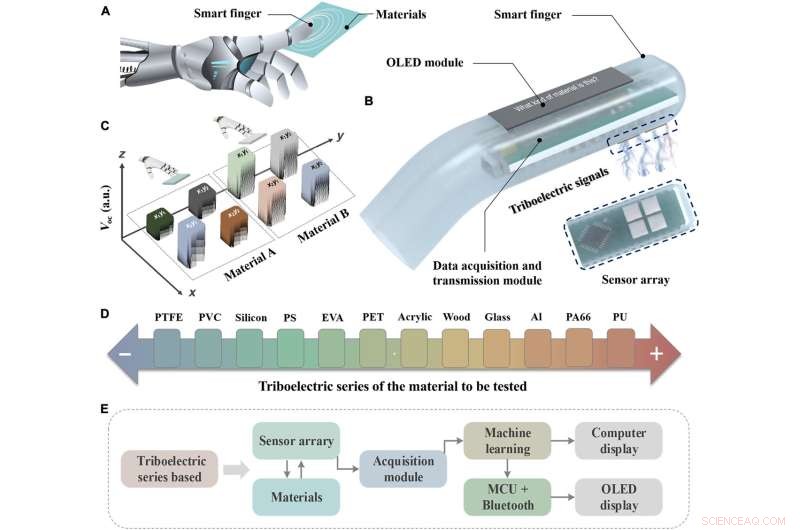
(A) Schematisch diagram van het materiële identificatieproces van de tribo-elektrische tactiele perceptie slimme vinger. (B) Structuur van de tribo-elektrische tactiele perceptie slimme vinger, bestaande uit een tribo-elektrische sensorarray, data-acquisitie en transmissiemodule en weergavemodule. (C) Schematisch diagram van de uitgangssignalen van de tribo-elektrische sensorarray wanneer de slimme vinger verschillende materialen identificeert. a.u., willekeurige eenheden. (D) Typische materialen die zich op verschillende posities in de tribo-elektrische reeks bevinden:Elektronegativiteit neemt toe van rechts naar links; omgekeerd neemt de elektropositiviteit van links naar rechts toe. (E) Stroomdiagram van de interactie tussen de modules van de slimme vinger bij het identificeren van materialen. Krediet:Wetenschappelijke vooruitgang (2022). DOI:10.1126/sciadv.abq2521
Een team van onderzoekers van de Chinese Academie van Wetenschappen heeft een kunstvinger ontwikkeld die bepaalde oppervlaktematerialen met 90% nauwkeurigheid kan identificeren. In hun paper gepubliceerd in het tijdschrift Science Advances , beschrijft de groep hoe ze tribo-elektrische sensoren gebruikten om hun testvinger de mogelijkheid te geven om tastzin te krijgen.
Voorafgaand onderzoek heeft geleid tot de ontwikkeling van robotvingers die het vermogen hebben om bepaalde eigenschappen van bepaalde oppervlakken te herkennen, zoals druk of temperatuur. aangeraakt worden.
De vinger is gemaakt door kleine vierkante sensoren aan te brengen op de punt van een vingervormig object. Elk van de vierkanten was gemaakt van een ander soort plastic polymeer, elk gekozen vanwege hun unieke elektrische eigenschappen. Wanneer dergelijke sensoren dicht bij een object worden bewogen, zoals een plat oppervlak, interageren elektronen van de sensoren op unieke manieren met de materialen.
De sensoren onder het polymeer waren allemaal verbonden met hun eigen processors in de vinger, die vervolgens met elkaar werden verbonden om resultaten te kunnen vergelijken en voor op machine learning gebaseerde gegevensanalyse. De onderzoekers bevestigden ook een klein LCD-scherm voor het weergeven van resultaten. De onderzoekers testten vervolgens hun vinger door deze verschillende vlakke oppervlakken te laten aanraken, zoals die van glas, hout, plastic en silicium. Ze vonden het in staat om gemiddeld 96,8% van de tijd het juiste materiaal te detecteren, met een minimale nauwkeurigheid van 90% voor alle oppervlakken. De onderzoekers testten de vinger ook op uithoudingsvermogen door hem duizenden keren een oppervlak te laten raken en ontdekten dat hij goed genoeg standhield voor industriële toepassingen.
De onderzoekers suggereren dat als hun vinger in een industriële omgeving zou worden gebruikt, deze rechtstreeks zou kunnen worden aangesloten op een controlemechanisme. Ze suggereren ook dat het kan worden gebruikt om producten te testen om ervoor te zorgen dat ze voldoen aan de productienormen. En ze merken ook op dat zo'n vinger ook kan worden gebruikt op een menselijke robot op ware grootte, wat bijdraagt aan de mogelijkheden ervan. Ze wijzen erop dat de technologie achter hun vinger waarschijnlijk kan worden gebruikt in prothetische apparaten om een bepaalde mate van aanraking te helpen herstellen voor mensen die een dergelijke vaardigheid hebben verloren. + Verder verkennen
Magazijnrobots die voelen op zicht
© 2022 Science X Network
 Zilver verbetert de efficiëntie van monograinlaagzonnecellen
Zilver verbetert de efficiëntie van monograinlaagzonnecellen- Een startup laten groeien met een grote impact van een kleine schimmel
- Chemici gebruiken supercomputers om oplosmiddelen te begrijpen
- Uitwisbare inkt voor 3D-printen
- Cu+-doping verbetert de zelfopgesloten exciton-emissie in gelegeerde Cs2(Ag/Na)InCl6 dubbele perovskiet
- NASA vindt tropische storm Jelawat sterker
- Dringende noodzaak om vlees- en zuivelconsumptie te verminderen om klimaatdoelstellingen te halen, zegt expert
- Nieuw soort aurora is helemaal geen aurora
- Woede in Delhi terwijl smog de kinderrace overspoelt, raakt golfevenement
- Het verschil tussen ratten en wilde ratten
Hoofdlijnen
- Beschrijving van de basisfuncties van enzymen in cellen
- Eenvoudige manieren om de structuren van de Skull
- Het onzichtbare zien:geboorte en dood van boomwortels in een toekomstige atmosfeer
- Wat is een reden waarom de classificatie van protisten in één koninkrijk moeilijk is?
- Chimpansees die het huis verlaten stellen het ouderschap uit
- Waarom is een atom elektrisch neutraal?
- Vier van de vijf pinyon-jeneverbes boomsoorten die in hun verspreidingsgebied in het westen afnemen
- Stijgende zeetemperaturen bedreigen Atlantische populaties van Bulwers-stormvogels
- Oudste dinosaurus van Afrika gevonden in Zimbabwe
- Slimme luidsprekers zijn overal - en ze luisteren naar meer dan je denkt

- Fiat-Chrysler, Peugeot in gesprek om autogigant van $ 50 miljard op te richten

- Licht verbindt twee werelden op één chip

- De op een na grootste luchtvaartmaatschappij van Frankrijk, Aigle Azur, gaat onder curatele

- Team lokaliseert bijna alle Amerikaanse zonnepanelen in een miljard afbeeldingen met machine learning


 VK eist EU-terugbetaling in Brexit-satellietrij
VK eist EU-terugbetaling in Brexit-satellietrij- Bestuderen van abstracte wiskundige vergelijkingen met behulp van tastbare oppervlakken
- Toename van de uitstoot van ondergrondse CO2-emissies in Italië als gevolg van aardbevingen
- Gewassen evolueerden 10 millennia eerder dan gedacht
- Variabele emissie van het superzware zwarte gat van de Melkweg
- Cambridge Analytica gebruikte onze geheimen voor winst – dezelfde gegevens kunnen worden gebruikt voor algemeen belang
- Stappen in het vinden van percentagerendement
- Japan lanceert nieuwste spionagesatelliet
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
