Wetenschap
Een op manta's geïnspireerde biosyncretische robot met stabiele bestuurbaarheid via dynamische elektrische stimulatie
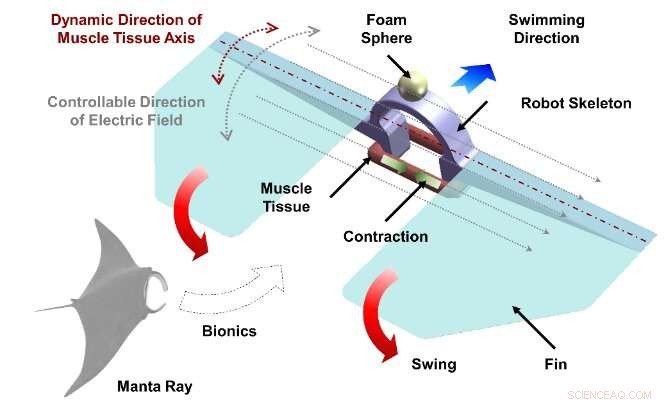
Deze bio-syncretische zwemmer was samengesteld uit een skeletstructuur, twee vinnen, een levende actuator en een microbolletje met schuimbalans. Credit:Chuang Zhang, Shenyang Institute of Automation, Chinese Academie van Wetenschappen
De natuur heeft de ontwikkeling van robots enorm ondersteund. Geïnspireerd door mantaroggen heeft een team van het State Key Laboratory of Robotics van het Shenyang Institute of Automation, Chinese Academy of Sciences, een bionische zwemrobot ontwikkeld die wordt aangedreven door gekweekt skeletspierweefsel en wordt bestuurd door circulaire gedistribueerde meervoudige elektroden (CDME) . De robot kan efficiënt worden aangedreven door slechts één spierweefsel.
Biomimetica is een van de belangrijkste onderzoeksmethoden voor robots, die de kinematische prestaties van robots kan verbeteren door de structuur en het gedrag van natuurlijke organismen te imiteren. De biosyncretische robot, die natuurlijke biologische materialen als kernelement gebruikt, is de verdere ontwikkeling van bionica.
Sommige levende cellen zijn gebruikt om sommige functies van robots te realiseren, waaronder detectie, controle en bediening. Er zijn echter innovatieve voortstuwings- en besturingsmethoden nodig om de beheersbare bewegingsprestaties van biosyncretische robots verder te ontwikkelen. Om dit probleem op te lossen, stelden onderzoekers een dynamische controlemethode voor op basis van CDME. Het onderzoek is gepubliceerd in het tijdschrift Cyborg and Bionic Systems .
Het team ontdekte dat het door CDME gegenereerde elektrische veld minder schadelijk was voor het kweekmedium en de cellen dan conventionele elektroden. Met behulp van deze methode kan de richting van het elektrische veld dat door de elektrode wordt gegenereerd dynamisch worden gecontroleerd, waardoor het in realtime parallel blijft aan het aandrijfweefsel van de robot, waardoor een stabiele besturing van de robot wordt gegarandeerd.
Eerst ontwierp het team het robotskelet op basis van de structuur van de mantarog en gebruikte polydimethylsiloxaan (PDMS) als het belangrijkste materiaal voor de structuur. Om de assemblage van het aandrijfweefsel en de robotstructuur te vergemakkelijken, kozen de onderzoekers tegelijkertijd het ringvormige weefsel gemaakt door myoblasten als aandrijfeenheid van de robot.
Om circulaire spierweefsels met effectieve contractiliteit te verkrijgen, werd bovendien een roterende elektrische stimulatie van de CDME gebruikt om uniforme inductie van de myoblasten te realiseren om te differentiëren in myotubes. Om de robot met een gewenste snelheid te laten zwemmen, werd de contractiliteit van het spierweefsel gemeten vóór montage met de zwemmerstructuur. Het onderzoeksteam gebruikte ook simulatiemethoden om de relatie tussen de bewegingsprestaties van de robot en de aandrijvende weefselcontractiekracht te analyseren.
Ten slotte, om de stabiele en controleerbare beweging van de voorgestelde bio-syncretische robot te demonstreren, realiseerden de onderzoekers het controleerbare zwemmen van de robot met verschillende snelheden met behulp van de voorgestelde dynamische elektrische stimulatiemethode. In het experiment toonde de robot effectief zwemmen en stabiele beheersbaarheid aan, wat de effectiviteit van het biomimetische ontwerp en de op CDME gebaseerde controlemethode die door het onderzoeksteam werd voorgesteld, verifieerde.
Het biomimetische ontwerp en de aandrijvingscontrolemethode die in deze studie wordt voorgesteld, bevordert niet alleen de verdere ontwikkeling van biosyncretische robots, maar heeft ook een bepaalde leidende betekenis voor het biomimetische ontwerp van zachte robots, spierweefselengineering en andere gerelateerde gebieden.
Hoewel de huidige biosyncretische robots een effectieve gecontroleerde beweging hebben bereikt, zijn er nog steeds veel belangrijke knelpunten die moeten worden overwonnen. De meeste robots zijn bijvoorbeeld centimeters groot, wat moeilijk is voor toepassingen zoals medicijnafgifte in vivo.
Technologieën, waaronder 3D-printen en flexibele manipulatie gericht op micro-nano biologische structuren, zijn de sleutel tot de ontwikkeling van biosyncretische microrobots voor klinische toepassingen en andere speciale omgevingen. Bovendien vertrouwen de meeste van de bestaande biosyncretische robots op externe kunstmatige stimuli om gecontroleerde bewegingen te bereiken, die mogelijk geen autonomie hebben. Daarom kan de detectie- en controlemethode op basis van levende cellen worden toegepast bij het onderzoek van biosyncretische robots om autonome robotbewegingen te realiseren op basis van omgevingsinformatie. + Verder verkennen
Een op bever geïnspireerde methode om de bewegingen van een eenbenige zwemmende robot te begeleiden
 Onderzoekers ontwikkelen flexibel kristal, de weg vrijmaken voor efficiëntere buigbare elektronica
Onderzoekers ontwikkelen flexibel kristal, de weg vrijmaken voor efficiëntere buigbare elektronica- Nieuwe inzichten in de oorsprong van het leven
- Legeronderzoekers doen explosieve ontdekking
- Rook uit derde hand en de risico's ervan onder de loep
- Betere thermo-elektrische eigenschappen bereikt in n-type composiet
- 3D-remote sensing van koraalriffen gebruiken om de biomassa van vissen te voorspellen
- Iqaluit kan tegen 2024 zonder zoet water komen te zitten
- 2017 al gekenmerkt door klimaatextremen:UN
- Arctisch zee-ijsverlies en de Euraziatische trend van winterkoeling:is er een verband?
- Arctisch zee-ijs wordt sneller dunner dan verwacht
Hoofdlijnen
- Het combineren van cassavemeel in het brooddeeg kan in de toekomst de toegang tot voedsel verzekeren
- In de mangoestenmaatschappij immigranten zijn een bonus - als ze tijd krijgen om zich te vestigen
- Puin van de tsunami van 2011 bracht honderden soorten over de Stille Oceaan
- Kunnen condors terugkeren naar Noord-Californië?
- Birdsong onthult zeldzame hybride koppeling die 10 miljoen jaar in de maak is
- Hoeveel Valence-elektronen heeft natrium?
- Taiwans schubdieren lijden een golf van aanvallen van wilde honden
- Wetenschap verklaart de kleur van je kerst
- Expeditie om de zuidelijke rechtse walvissen rond Zuid-Georgië te controleren op gezondheid
- Sono Motors zet elektrische auto in productiemodus 2019

- Amazones Bezos, vrouw bereikt grootste echtscheidingsdeal in geschiedenis (update)

- Volvos Polestar onthult elektrische auto aangeprezen als Tesla-rivaal

- Onderzoek bekijkt hoe Snapchat-filters het zelfbeeld beïnvloeden

- EU-hof boost voor activist in strijd om Facebook-gegevensoverdracht


 Indiase boeren zeggen geen alternatief voor het verbranden van stoppels
Indiase boeren zeggen geen alternatief voor het verbranden van stoppels- Evenwicht tussen voedselzekerheid en stikstofgebruik
- Zeebodemgegevens wijzen op wereldwijd vulkanisme na Chicxulub-meteooraanval
- Moeten black box-gegevens in de cloud worden opgeslagen?
- NASA's InSight krijgt een paar extra weken Mars-wetenschap
- Een waterstofsensor die werkt bij kamertemperatuur
- Rover-bevindingen bieden een glimp van het oude landschap van Rode Planeten
- Nieuwe Low-Load Cycle richt zich op de uitstoot van zware dieselmotoren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
