Wetenschap
Een indoor MAV pose-schattingssysteem dat gebruikmaakt van bestaande Wi-Fi-infrastructuur
Krediet:Zhang, Wang &Jiang.
Micro-luchtvaartuigen (MAV's) kunnen tal van nuttige toepassingen hebben, bijvoorbeeld, mensen helpen bij het invullen van magazijninventarissen of zoek- en reddingsmissies. Hoewel veel bedrijven wereldwijd al zijn begonnen met het produceren en gebruiken van MAV's, sommige van deze vliegende robots hebben nog steeds aanzienlijke beperkingen.
Om het meest effectief te werken, MAV's moeten worden ondersteund door een efficiënt pose-inschattingssysteem. Dit is een systeem of methode die de positie en houding van een drone kan berekenen, die vervolgens kan worden gebruikt om zijn vlucht te controleren, pas de snelheid aan en help de navigatie terwijl hij autonoom werkt en op afstand wordt bestuurd.
Onderzoekers van de Huazhong University of Science and Technology in China hebben onlangs een nieuw systeem ontwikkeld voor het bepalen van de pose van MAV's in binnenomgevingen. Hun nieuwe aanpak, geschetst in een paper dat vooraf is gepubliceerd op arXIv en zal worden gepubliceerd in IEEE-transacties op industriële elektronica , maakt gebruik van bestaande wifi-infrastructuur om effectievere navigatie in kleine en wendbare drones mogelijk te maken.
"In ons vorige werk, we hebben de haalbaarheid bewezen van het gebruik van de lokalisatie van WiFi om de drift van de ingebouwde traagheidssensor (IMU) te corrigeren, "Shengkai Zhang, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Echter, de techniek die we hebben ontwikkeld, genaamd CWISE, werkt alleen in open ruimtes en zonder multipath fading. In onze huidige studie, we duwen deze methode verder om het multipath-probleem in binnenomgevingen aan te pakken en ons voorgestelde systeem praktischer te maken."
Het belangrijkste doel van de nieuwe studie, uitgevoerd door Zhang en zijn collega's, was om de gemakkelijk beschikbare WiFi-infrastructuur te gebruiken om de 6-DoF-poses van MAV's te schatten. In tegenstelling tot bestaande pose-inschattingstechnieken op basis van computervisie, het door hen ontwikkelde systeem is vrij van visuele beperkingen, wat betekent dat het goed werkt onder verschillende licht- en omgevingsomstandigheden.
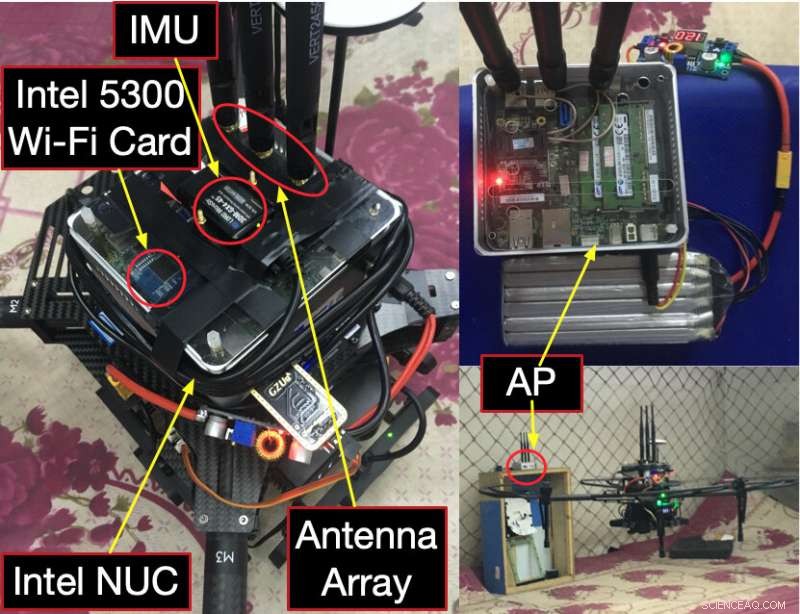
In plaats van visuele stimuli te analyseren die door sensoren worden verzameld, het systeem maakt gebruik van de vele subdragers van WiFi orthogonal frequency-division multiplexing (OFDM) signalen. Specifieker, het gebruikt deze signalen om de hoek van aankomst (AoA) van het directe pad tussen een MAV en een WiFi-toegangspunt te vinden tussen de vele reflecties van het signaal in binnenomgevingen.
Het systeem dat door Zhang en zijn collega's is gemaakt, heeft twee hoofdcomponenten:een AoA-schattingsalgoritme en een wifi-traagheidssensorfusiemodel. Het AoA-schattingsalgoritme is een rekenmethode die MAV-attitudes schat en de AoA ontwart voor positionering. Het WiFi-traagheidssensorfusiemodel, anderzijds, combineert de geschatte AoA en gegevens die zijn verzameld met behulp van traagheidssensoren om de poses van een drone te optimaliseren.
"Het is bekend dat hoeken kunnen worden gebruikt om een doel te lokaliseren via triangulatie, echter, zonder metrische schaal, " zei Zhang. "Aan de andere kant, de IMU van een MAV biedt metrische poses, maar lijdt aan temporele drift. We combineren WiFi AoA's en traagheidsmetingen en nemen het beste van twee werelden."
Het door Zhang en zijn collega's ontwikkelde systeem heeft tal van voordelen ten opzichte van meer conventionele pose-inschattingstechnieken. Eerst, het is lichtgewicht en direct inzetbaar in elke binnenomgeving die wordt gedekt door een WiFi-netwerk. Bovendien, het presteert goed in werkruimten met verschillende licht- en textuuromstandigheden.
De studie benadrukt het potentieel van het gebruik van wifi-verbindingen om de detectie- en navigatiestrategieën van robots te verbeteren. Wanneer getest in een reeks experimenten in binnenomgevingen, het nieuwe pose-inschattingssysteem behaalde opmerkelijke resultaten, met een gemiddelde positiefout van 61,7 cm en een houdingsfout van 0,92 graden. In de toekomst, het kan worden gebruikt om de MAV-navigatie in magazijnen te verbeteren, kantoren of andere binnenomgevingen.
"Momenteel, de nauwkeurigheid van onze wifi-inertiële pose-schatter is op decimeterniveau, "Zei Zhang. "Dat willen we graag verbeteren. In de tussentijd, WiFi zelf heeft enkele beperkingen, bijv. structuur blokkade, interferentie, enzovoort. Wij zijn van mening dat een juiste koppeling van visuele waarneming en draadloze waarneming een robuustere en nauwkeurigere pose-inschatting zou opleveren, wat resulteert in meer praktische autonome robots."
© 2020 Wetenschap X Netwerk
 Toxiciteit van huishoudelijk bleekmiddel
Toxiciteit van huishoudelijk bleekmiddel - Hoe Glycolysis
- Het beste van twee werelden:hoge entropie ontmoet lage dimensies, opent oneindige mogelijkheden
- Machine-learning maakt een voorheen ongeziene kijk op polymeren die nuttig zijn op biomedisch gebied mogelijk
- Hoe de componenten van inkt te scheiden
Hoofdlijnen
- Orgelsystemen betrokken bij homeostase
- Een sociaal controlesysteem garandeert de zuiverheid van embryonale stamcellen
- Hoe doodt alcohol bacteriën?
- DNA-transcriptie: hoe werkt het?
- Malawi wendt zich tot Britse troepen in stropersoorlog
- Hoe klimaatverandering subalpiene wilde bloemengemeenschappen kan hervormen
- Wedstrijden om vrouwelijke aandacht maken van mannen betere presteerders - in fruitvliegjes
- Zeeschildpadden sterven nadat ze verstrikt zijn geraakt in plastic afval
- Acht redenen om deze Halloween niet te laten schrikken door spinnen
- Autofabrikanten melden daling van Amerikaanse verkopen tot halverwege het jaar

- Nieuw onderzoek laat zien hoe interactie tussen brein en computer de cinema verandert

- Combinatie van oud en nieuw levert nieuwe cyberbeveiligingstool voor elektriciteitsnetwerken op

- Rekbare draadloze sensor kan de genezing van cerebrale aneurysma's volgen
- Groeien en snoeien AI bootst hersenontwikkeling na, vermindert energieverbruik


 Oproep om een welzijnsindex toe te voegen aan nationale economische maatregelen
Oproep om een welzijnsindex toe te voegen aan nationale economische maatregelen- Toegepast natuurwetenschappelijk onderzoek bevordert zonne-energie
- Mars ondersteboven
- Afbeelding:Suomi NPP-satelliet legt aanhoudende branden in Alaska vast
- Optische seismometer overleeft helse top van Caribische vulkaan
- De dorst van elektriciteitscentrales verminderen
- Content van sociale media is belangrijk voor sollicitanten, onderzoekers vinden
- Hoe vermenigvuldigingsfeiten te leren door Rhyming
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Danish | Norway | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
