Wetenschap
Studie van vrij vallende papiervormen kan helpen bij het ontwerpen van bio-geïnspireerde robotica

Krediet:CC0 Publiek Domein
Onderzoek naar de trajecten van honderden vrij vallende papiervormen kan helpen bij het ontwerpen van bio-geïnspireerde robotica die de natuur nabootst.
Onderzoekers van het Bio-Inspired Robotics Lab van het Department of Engineering zijn de uitdaging aangegaan om het complexe en gevarieerde gedrag van cirkels te modelleren en, Voor de eerste keer, complexer vierkant, zeshoekige en kruisvormen - allemaal zonder menselijke tussenkomst.
Het onderzoek, gepubliceerd in het tijdschrift Intelligentie van de natuurmachine , maakt gebruik van robotautomatisering, computervisie en machine learning om autonoom het valgedrag van de vormen in kaart te brengen die elk vier valstijlen vertonen:tuimelen (voortdurend heen en weer draaien), chaotisch (schakelen tussen tuimel- en duikbewegingen zonder duidelijke structuur), stabiel en periodiek (gestaag vallen of heen en weer oscilleren met een horizontale oriëntatie).
Ingenieurs doctoraat student Toby Howison, die deel uitmaakte van het onderzoeksteam, zei dat de onderzoeksresultaten kunnen worden gebruikt om praktisch inzicht te geven in het ontwerpen van robotica die mogelijk bepaald gedrag moet vertonen met betrekking tot hun stabiliteit of valsnelheid, bijvoorbeeld.
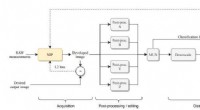
De aanpak - bekend als een iteratief fysiek experimentatiesysteem (IPES) - stelt onderzoekers in staat om snel grote hoeveelheden gegevens te verzamelen en deze automatisch te analyseren om patronen in de onderliggende dynamiek van de vallende papiervormen te onthullen. Het hele proces duurt gemiddeld 90 seconden om te voltooien, met vormen die tussen de één en vijf seconden nodig hebben om op de grond te vallen. Het automatiseren van dit proces zorgt voor een meer herhaalbare, minder subjectieve classificatiebenadering, en de resultaten toonden aan dat een classificatieschema zonder toezicht zoals dit nauwkeurig onderscheid kan maken tussen chaotische en tuimelende bewegingen in alle vier de vormen.
De experimentele opstelling bestond uit een lasersnijder om vormen te vervaardigen, een Universal Robots UR5-robotarm uitgerust met een aangepaste zuiggrijper om de vormen op te pakken en neer te zetten vanaf een hoogte van 1,1 meter - horizontaal of verticaal (willekeurig gekozen), en twee hogesnelheidscamera's om het valgedrag vast te leggen. Hierdoor konden de driedimensionale valtrajecten en bijbehorende oscillatie worden berekend. De gegevens werden vervolgens verwerkt en gebruikt om automatisch gedrag te segmenteren en te classificeren en te onderzoeken, bijvoorbeeld, de relatie tussen de vorm van het papier, zijn gedrag en valsnelheid.
Toby Howison zei:"Als we vliegende robots willen ontwerpen met ingewikkelde bewegingen zoals glijden of klapperen, dit vereist wat experimenten in de echte wereld. Dit is waar autonome systemen zoals IPES kunnen helpen om niet alleen ons begrip van dergelijke bewegingen, maar ook hoe ze kunnen worden gerepliceerd in robotontwerp.
"Door de trajecten van honderden vrij vallende papiervormen te onderzoeken - een al lang bestaand uitdagend fenomeen - hebben we kunnen bestuderen, verschillende soorten valgedrag op een nieuwe manier analyseren en interpreteren, dankzij robottechnologie. Als resultaat, we kunnen nu onze kennis van dit gedrag overbrengen naar het ontwerp van zachte robotica die kan lopen of zwemmen, bijvoorbeeld.
"Alleen door structuren zoals vrij vallende papiervormen te begrijpen, kunnen we meer leren over hoe de verschillende componenten van die structuur op elkaar inwerken. Ons onderzoek toont aan dat de interactie tussen de vorm van het papier en zijn omgeving zorgt voor een betrouwbare vallende stijl die wordt gecreëerd zonder enige controle aan boord, zoals, een computerchip of motor."
 On-the-fly analyse van hoe katalysatoren veranderen tijdens reacties om de prestaties te verbeteren
On-the-fly analyse van hoe katalysatoren veranderen tijdens reacties om de prestaties te verbeteren- Heavy metal donder:Eiwit kan worden ingeschakeld om elektriciteit als een metaal te geleiden
- Hybride materiaal brengt transportbrandstofcellen van de volgende generatie dichterbij
- Hoe RNA werd gevormd bij de oorsprong van het leven
- Wat bepaalt de hoeveelheid chemische energie die een stof heeft?
- Voor selenium in rivieren, timing is belangrijk
- Onderzoekers vinden verkoelend effect van aerosolen in cumulus- en MSC-wolken twee keer zo hoog als gedacht
- Gemeenschappen ontvluchten uitbarsting bij Vulkaan van Vuur in Guatemala
- Wat zijn enkele verschillen tussen P & S-golven?
- Hawaï-vulkaan genereert giftige gaspluim genaamd laze
Hoofdlijnen
- Genoomsequencing onthult uitgebreide inteelt bij Scandinavische wolven
- Partijdiscipline voor springgenen
- Waarom zijn botten belangrijk voor het lichaam?
- Een bacterieel stroomdiagram maken
- Veel retailers in het Midwesten verkopen verkeerd gelabelde invasieve wijnstokken
- Politieke instabiliteit en zwak bestuur leiden tot verlies van soorten, studie vondsten
- 'S Werelds oudste bevroren sperma werkt prima
- Van renpaarden tot bananen:het belang van bioveiligheid
- Wat zit er aan de linkerkant van je lichaam in de menselijke anatomie?
- Australië laat Google en Facebook betalen voor nieuwscontent

- Online haatzaaien kan worden ingeperkt als een computervirus, onderzoekers zeggen:

- Snapchat controleert op misleiding in politieke advertenties

- Digitale vervalsingen aanpakken met AI-geleerde artefacten
- Robotic werkcel voert direct high-throughput testen uit


 Machine learning zal opnieuw worden ontworpen, niet vervangen, werk
Machine learning zal opnieuw worden ontworpen, niet vervangen, werk- Thaise wetgevers keuren controversiële cyberbeveiligingswet goed
- Nieuwe microkam kan helpen bij het ontdekken van exoplaneten en het opsporen van ziekten
- Hersenbeelden ontrafelen met deep learning
- Een nieuw hulpmiddel om fundamentele zaken te onderzoeken
- Onderzoek vindt dat papegaaivissen cruciaal zijn voor de gezondheid van koraalriffen
- Onderzoek identificeert refugia voor klimaatverandering in droge bosregio
- Telefoons, biometrie brandstof sprong in bankrekeningbezit
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
