Wetenschap
Een interactieve drone om mensen te helpen in kantooromgevingen
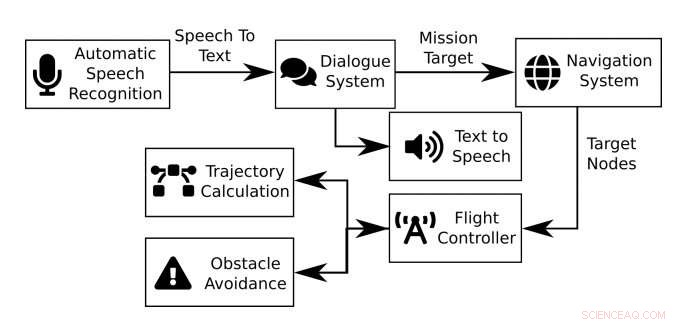
Een overzicht van het systeem. Krediet:Fuhrman et al.
Onderzoekers van het Karlsruhe Institute of Technology in Duitsland hebben onlangs een interactieve drone ontwikkeld die is ontworpen om mensen te helpen in binnenomgevingen zoals kantoren of laboratoria. In een paper dat vooraf is gepubliceerd op arXiv, de onderzoekers presenteerden de resultaten van hun drone bij het uitvoeren van eenvoudige taken in het laboratorium.
"In deze krant, we presenteren een drone-assistent op kantoor die de taak heeft om boodschappen te doen en eenvoudige taken uit te voeren in ons laboratorium, terwijl ze instructies krijgen van en interactie hebben met mensen in de ruimte, ’ schreven de onderzoekers in hun paper.
De benadering van het ontwerpen van de drone die door de onderzoekers is aangenomen, is gecentreerd rond het begrip "missies, " wat inhoudt dat je invoerparameters moet ontvangen en aan succesvolle voorwaarden moet voldoen, of 'doelen'. Om een missie succesvol te voltooien, hun drone moet alle bijbehorende doelen kunnen bereiken.
"In het geval van het systeem dat in dit document wordt gepresenteerd, de invoerparameter is een verbaal verzoek om in een kantooromgeving naar een bepaalde bestemming (kamer of persoon) te vliegen, " legden de onderzoekers uit in hun paper. "Het doel van de missie is om het doel te bereiken zonder enige handmatige tussenkomst en botsing met statische of dynamische obstakels."
De door de onderzoekers gepresenteerde interactieve drone is een aangepaste versie van de Crazyflie 2.0-drone, ontworpen door een bedrijf genaamd Bitcraze. Het heeft verschillende componenten:een subsysteem voor automatische spraakherkenning (ASR) dat de verbale verzoeken van een gebruiker transcribeert; een dialoogsysteem dat deze verzoeken ontvangt, verwerkt ze en identificeert de doelgroep binnen het kantoor, en een vluchtcontroller die het traject van de drone naar het gewenste doel plant terwijl hij botsingen met obstakels probeert te vermijden.
De onderzoekers besloten om elk van de componenten van het systeem afzonderlijk te evalueren om duidelijk te bepalen welke functies geperfectioneerd moesten worden. Om het dialoogsysteem te evalueren, ze vroegen drie anderstaligen Engels om eenvoudige verbale instructies hardop te geven, bijvoorbeeld, de drone opdracht geven om naar een andere kamer te vliegen of een andere persoon in het lab te bezoeken.
Vervolgens, de onderzoekers testten de dieptewaarneming en het vermijden van botsingen van hun drone door de drone drie verschillende soorten obstakels voor te stellen:een gesloten deur, een persoon, en een metalen bank. Eindelijk, ze onderzochten de snelheid waarmee hun systeem missies met succes kon voltooien door het met behulp van schriftelijke instructies naar verschillende doelkamers te sturen.

Een van de Crazylife-drones die de onderzoekers gebruikten. Krediet:Fuhrman et al.
Terwijl, de drone bleek missies te voltooien met een slagingspercentage van 77,78 procent, ze ontdekten dat het verschillende beperkingen had. Bijvoorbeeld, een van de meest voorkomende oorzaken van het mislukken van een missie was dat de drone tijdens het opstijgen een beetje draaide, omdat de vier propellers op enigszins verschillende tijdstippen begonnen te werken.
"Omdat dit ons eerste prototype is, er is genoeg ruimte voor toekomstige verbetering, niet alleen op elk van de afzonderlijke componenten, maar ook op het systeem als geheel, ', aldus de onderzoekers.
Het team merkte op dat het dialoogsysteem van de drone bijzonder slecht presteerde en de instructies van een persoon in het beste geval in 57 procent van de gevallen kon begrijpen. Het belangrijkste probleem met het dialoogsysteem was dat de ASR problemen gaf om de namen van mensen te identificeren wanneer ze door gebruikers werden gesproken, waardoor het spraakherkenningsproces te vroeg wordt afgebroken.
"Bij toekomstige werkzaamheden we willen een verbeterd ARS-systeem gebruiken, schreven de onderzoekers in hun paper. "Bovendien, om een grotere verscheidenheid aan natuurlijke taal mogelijk te maken zonder de omvang van de trainingsdataset te vergroten, we willen ook een multi-tasking-aanpak gebruiken. Dat betekent dat de drone-dataset naast een out-of-domain dataset wordt getraind."
In de eerste testen, de botsingsdetectiecomponent van de drone presteerde opmerkelijk goed, in de meeste gevallen effectief voorkomen van botsingen met zowel mensen als grote objecten. Echter, het bleek te worstelen met het detecteren van zeer dunne of doorschijnende meubels. Om deze beperking te overwinnen, het team is nu van plan om een nauwkeuriger, real-time kaart van de omgeving, zoals momenteel, het systeem baseert zijn voorspellingen op een vooraf opgenomen 2D-kaart.
"Het verminderen van positionele fouten zou ook moeten helpen om ons totale missiesuccespercentage te verbeteren, omdat dit een van de belangrijkste oorzaken was van het mislukken van een missie tijdens onze tests, " verklaarden de onderzoekers in hun paper. "Het andere probleem dat tijdens onze tests naar voren kwam, was dat het dieptewaarnemingssysteem slecht presteerde onder zeer heldere of veranderende lichtomstandigheden. We zijn van plan om ook deze problemen in de toekomst aan te pakken."
Bovendien, in hun volgende studie, de onderzoekers willen de batterijduur en het batterijbeheer van het systeem verbeteren, zoals op dit moment, het kan slechts drie of vier missies voltooien voordat het moet worden opgeladen. Dit aantal willen ze uiteindelijk flink verhogen, terwijl ze ook nieuwe oplossingen bedenken die dit probleem kunnen helpen verminderen.
© 2019 Wetenschap X Netwerk
 Onderzoekers krijgen controle over de interne structuur van zelf-geassembleerde composietmaterialen
Onderzoekers krijgen controle over de interne structuur van zelf-geassembleerde composietmaterialen- Licht kan worden gebruikt om de genfunctie te regelen
- Ademanalysator ter grootte van schoenendoos detecteert dodelijke longziekte sneller, nauwkeuriger dan artsen
- Wordt je toekomstige kleding gemaakt van algen?
- Onderzoekers produceren allereerste video's van chemische synthese met atomaire resolutie
- Toegenomen smeltende sneeuw in de winter bedreigt westerse watervoorraden
- Wat was er eerst:complex leven of veel zuurstof in de lucht?
- Aardwetenschappers roepen op tot preventie- en waarschuwingssystemen voor overstromingen in de Himalaya
- Studie synthetiseert wat klimaatverandering betekent voor bosbranden in het noordwesten
- De voordelen van investeren in koolstofvrije steden
Hoofdlijnen
- Wat maakt bodem, bodem? Onderzoekers vinden verborgen aanwijzingen in DNA
- Heb jij een innerlijke stem? Niet iedereen doet
- Gene drives hebben het potentieel om muggenpopulaties te onderdrukken, maar resistente muggen duiken op
- Bijtkrachtonderzoek onthult dinosaurus-etende kikker
- Hoe is een Paramecium Digest Food?
- Eukaryotische celkarakteristieken
- Zelfgemaakt skeletmodel
- Team ontdekt nieuwe mechanismen voor DNA-stabiliteit
- Kenmerken levende cel






 Airbus vergroot Amerikaanse voetafdruk met nieuwe A220-fabriek in Alabama
Airbus vergroot Amerikaanse voetafdruk met nieuwe A220-fabriek in Alabama- Onderzoekers vinden een manier om de contactweerstand te verminderen met molybdeendisulfide nanosheets
- Afscheid nemen van slash-and-burn
- Onderzoekers onderzoeken de factoren die van invloed waren op beslissingen om te evacueren tijdens en na de puinstroom van Montecito in 2018
- Machine learning stimuleert NSynth Supers nieuwe muziekgeluiden
- Wat zou er gebeuren als een kristal van een opgeloste stof aan een onverzadigde oplossing werd toegevoegd?
- Frankrijk dringt er bij G7 op aan om internationale oplossing te vinden voor digitale belastingen
- Methode stelt onderzoekers in staat lichaamsgeurmonsters van zoogdieren op een niet-invasieve manier te verzamelen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Danish | Norway | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
