Wetenschap
ROBOSHERLOCK:een systeem om de robotprestaties bij manipulatietaken te verbeteren
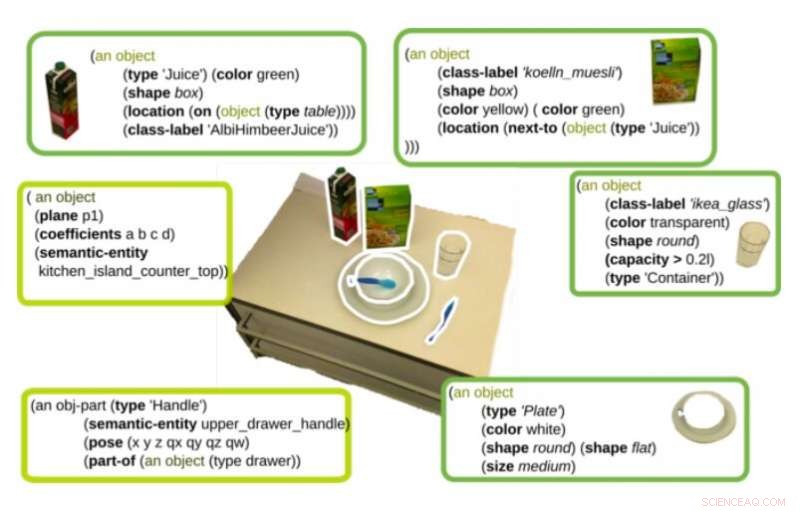
Een semantisch rijke beschrijving van een ontbijtscène. Krediet:Bálint-Benczédi et al.
In de afgelopen tien jaar of zo, vooruitgang in machine learning hebben de ontwikkeling mogelijk gemaakt van systemen die steeds autonomer worden, inclusief zelfrijdende voertuigen, virtuele assistenten en mobiele robots. Onder andere, onderzoekers die autonome systemen ontwikkelen, moeten manieren vinden om componenten te integreren die zijn ontworpen om verschillende en toch complementaire subtaken aan te pakken.
Bijvoorbeeld, een robot die handmatige taken uitvoert in het huis van een menselijke gebruiker, moet objecten in zijn omgeving kunnen waarnemen en tegelijkertijd informatie over deze objecten kunnen ophalen die vervolgens kan worden gebruikt om zijn bewegingen en acties te plannen. Dit proces, ook bekend als het "perceptie-cognitie-actie" paradigma, is van cruciaal belang, omdat het de robot uiteindelijk in staat stelt om nuttige strategieën te bedenken en taken efficiënt uit te voeren.
Tot dusver, de meeste methoden om dit perceptie-cognitie-actieparadigma in robots te implementeren, behandelen deze drie taken als bijna volledig onafhankelijke modules die als zwarte dozen voor elkaar fungeren. Een team van onderzoekers van de Universiteit van Bremen en de Universiteit van München in Duitsland, echter, gelooft dat het koppelen van het "perceptie"-systeem van een robot met zijn cognitie (d.w.z. het vermogen om informatie over objecten in de omgeving te "redeneren" of op te halen) zou de algehele prestaties aanzienlijk kunnen verbeteren.
Met dit in gedachten, de onderzoekers hebben onlangs een cognitief waarnemingssysteem ontwikkeld dat de prestaties van mobiele robots bij alledaagse manipulatietaken zou kunnen verbeteren. Dit systeem, genaamd ROBOSHERLOCK, verkrijgt perceptie via content analytics (CA), een strategie die het gebruik van statistische methoden inhoudt om grote hoeveelheden gegevens te analyseren.
De gegevens die door ROBOSHERLOCK worden geanalyseerd, zijn "ongestructureerd, " aangezien de structuur niet de semantiek weerspiegelt die ermee verbonden is, zoals in een database of spreadsheet. Het systeem gebruikt dus een strategie die bekend staat als ongestructureerd informatiebeheer (UIM), wat in wezen betekent dat het grote hoeveelheden ongestructureerde gegevens kan verwerken (bijv. tekst documenten, geluidsbestanden, afbeeldingen, enz.) met behulp van een reeks algoritmen voor het extraheren van informatie. Elk van deze algoritmen extraheert verschillende soorten kennis, afhankelijk van zijn "expertise, " en ze worden vervolgens beoordeeld en gecombineerd om tot één consistente beslissing te komen.
"In ROBOSHERLOCK, perceptie en interpretatie van realistische scènes is geformuleerd als een ongestructureerd informatiebeheer (UIM) probleem, " schreven de onderzoekers in hun paper. "De toepassing van het UIM-principe ondersteunt de implementatie van perceptiesystemen die taakrelevante vragen over objecten in een scène kunnen beantwoorden, de prestaties van objectherkenning verbeteren door de sterke punten van meerdere waarnemingsalgoritmen te combineren, ondersteunen kennisgebaseerd redeneren over objecten en maken automatische en kennisgestuurde generatie van verwerkingspijplijnen mogelijk."
De onderzoekers evalueerden hun raamwerk in een reeks tests, toepassen op verschillende systemen voor real-world scene perceptie. Ze ontdekten dat "redeneren" over (d.w.z. verwerking) de achtergrondkennis die door zijn algoritmen wordt opgehaald, stelt ROBOSHERLOCK in staat een breed scala aan vragen te beantwoorden, verder gaan dan was is direct waarneembaar in de omgeving.
De componenten van ROBOSHERLOCK die de onderzoekers in hun recente studie hebben gepresenteerd, kunnen worden gezien als de kernfunctionaliteiten. Vervolgens, de onderzoekers hebben ook verschillende uitbreidingen ontwikkeld die de cognitieve capaciteiten van het systeem verbeteren. Bijvoorbeeld, ze creëerden een extensie waarmee het systeem mensen en objecten tegelijkertijd kan detecteren, redeneren over de acties die de mensen uitvoeren en de bedoelingen achter deze acties.
"Recenter, we hebben onderzocht hoe het ROBOSHERLOCK-raamwerk de agenten in staat kan stellen te 'dromen' en met behulp van geavanceerde gaming-engines variaties van een taak te genereren en nieuwe perceptiemodellen te leren, " schreven de onderzoekers in hun paper. "Al deze uitbreidingen kijken naar robotperceptie vanuit het perspectief van een robot die taken uitvoert, wat niet mogelijk zou zijn geweest zonder het hier gepresenteerde kernraamwerk."
© 2019 Wetenschap X Netwerk
 Verbeterde pH-sondes kunnen helpen bij kankerbehandelingen
Verbeterde pH-sondes kunnen helpen bij kankerbehandelingen- Onderzoekers in West Virginia gebruiken neutronen om materialen te bestuderen voor verbeteringen aan energiecentrales
- De suikercode ontcijferen
- Nuttige microben inhaleren koolstofdioxide via een poreuze cilindrische elektrode en scheiden nuttige chemicaliën uit
- Hoe het stabiliseren van ongeordende eiwitten kan leiden tot de volgende generatie medische toepassingen
Hoofdlijnen
- Nieuw gevonden eiwit kan virale infectie en herpes-geïnduceerde kanker voorkomen
- Een lijst met vijf kenmerken van chromosomen
- Op pinguïn gemonteerde video legt gastronomische ontmoetingen van het gelatineuze soort vast
- Hoeveel tijd kost het om een DNA-molecuul te repliceren?
- Infectieziekten:CTRL + ALT + Delete
- Het effect van temperatuur op celmembranen
- Cellulaire ademhaling in ontkiemende zaden
- Hoe maak je een 3D-plant eukaryotisch celmodel
- NASA Twins-onderzoek wordt gerepliceerd op Everest
- De nepnieuwsdetector
- Nieuwe algoritmen voor slimme horloges kunnen helpen identificeren waarom u slecht slaapt

- Breedbandonderzoeker gelooft dat gebrek aan toegang kansen biedt
- Italië vertelt Ryanair, Wizz Air stopt met opladen van bagage

- Pinterest meldt kleiner 1Q-verlies, maar resultaten slepen aandelen mee


 20 procent van de Amerikanen verantwoordelijk voor bijna de helft van de voedselgerelateerde broeikasgasemissies in de VS
20 procent van de Amerikanen verantwoordelijk voor bijna de helft van de voedselgerelateerde broeikasgasemissies in de VS- Chemici manipuleren de kwantumtoestanden van gouden nanoclusters
- Peiling toont aan dat consensus voor klimaatbeleid sterk blijft
- Voedselwetenschappers upcyclen onverkocht brood tot smakelijke probiotische drank en verminderen voedselverspilling
- Nieuwe techniek om de chemische samenstelling en structuur van monsters te karakteriseren
- Natuurkundige stelt manier voor om sluitertijden van camera's die moleculen waarnemen vast te leggen
- Honderdduizenden runderen dood gevreesd na overstromingen in Australië
- Magnetische behandeling kan helpen bij het verwijderen van de smaak van wijnen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | French | Swedish |

-
Wetenschap © https://nl.scienceaq.com
