Wetenschap
Een multi-objectieve optimalisatiebenadering voor sociaal bewuste robotnavigatie
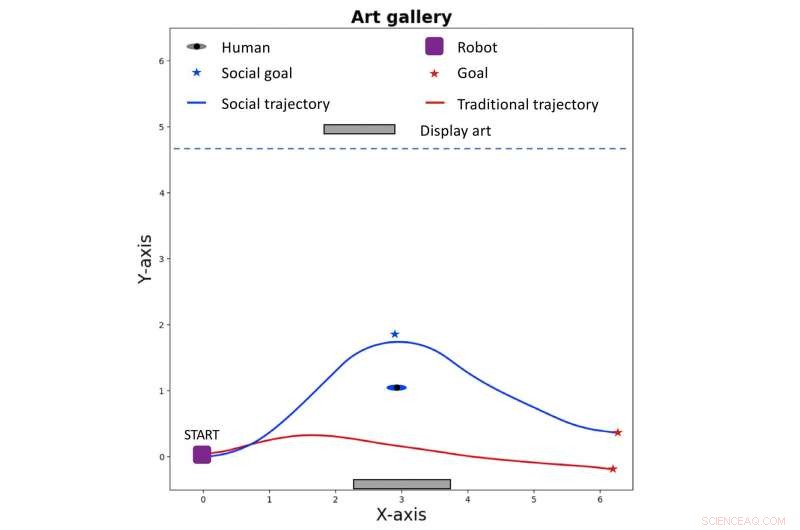
Een mobiele robot die rekening houdt met de activiteitenruimte in een kunstgalerie waar de robot met SAN-planner de activiteitenruimte vermijdt, weergegeven door het blauwe traject. Krediet:Banisetty et al.
Mobiele robots vinden geleidelijk hun weg naar een aantal door mensen bevolkte omgevingen, inclusief ziekenhuizen, winkelcentra en mensenhuizen. Om ervoor te zorgen dat deze robots met mensen in hun omgeving kunnen communiceren, ze moeten een aantal onuitgesproken sociale normen respecteren die worden geassocieerd met het delen van een bepaalde omgeving met anderen.
Met dit in gedachten, onderzoekers van de Universiteit van Nevada, Reno heeft onlangs een niet-lineaire, multi-objectieve optimalisatiebenadering die sociaal bewuste navigatie in mobiele robots mogelijk zou kunnen maken. Deze aanpak, voor het eerst beschreven in een paper gepresenteerd op de 2018 International Conference on Robots and Systems (IROS) en nu gepubliceerd op arXiv, zorgt ervoor dat robots de persoonlijke ruimte van mensen in hun omgeving niet binnendringen, terwijl het ook in verschillende scenario's effectievere mens-robot-interacties (HRI's) mogelijk maakt.
"Dit onderzoek begon in eerste instantie als onderdeel van mijn afstudeerwerk met robots en kinderen, "David Feil-Seifer, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Eerder werk omvatte het ontwikkelen van een robot voor omgevingen waar we wilden dat een robot met kinderen zou communiceren. In dit geval we lieten de robot het meest 'efficiënte' pad nemen volgens de metrieken die vaak worden gebruikt bij het plannen van robotpaden (het minimaliseren van de tijd voor een beweging, het minimaliseren van de afgelegde afstand, niets raken)."
In een eerdere studie gepubliceerd in de Journal of Human-Robot Interaction , Feil-Seifer en zijn collega's probeerden robotnavigatiegedrag te ontwikkelen voor omgevingen met kinderen. Pilotwerk toonde aan dat de robot effectief de gewenste locatie kon bereiken zonder iets te raken, maar de onderzoekers merkten op dat de kinderen doorgaans slecht reageerden op de robot.
In feite, de robot die in hun experimenten werd gebruikt, zou zich over het algemeen van kinderen afwenden en zo snel mogelijk naar de gewenste locatie gaan. Als gevolg van dit gedrag, de kinderen dachten dat de robot niet met hen wilde communiceren.
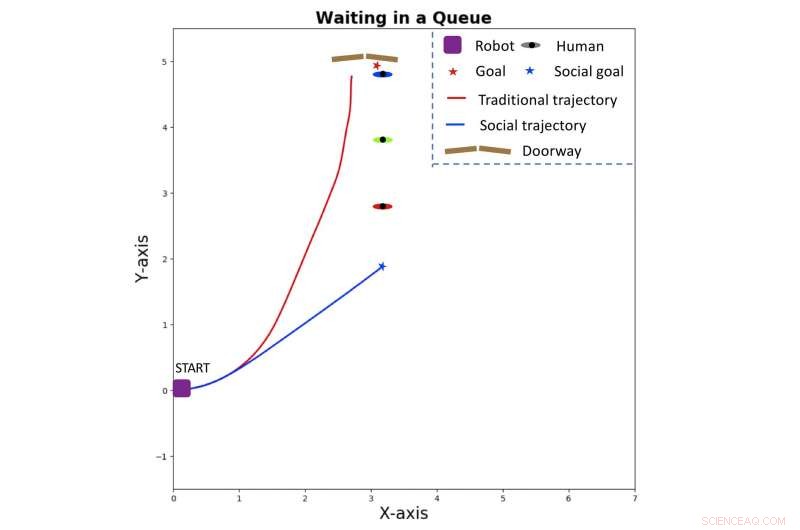
Een mobiele robot voegt zich bij een keu, gevormd voor een deuropeningsscenario. De traditionele planner genereerde het rode traject, de robot naar een locatie naast de eerste persoon leiden (ongepast), de lijn doorsnijden. Het blauwe traject, onze voorgestelde aanpak, de robot naar de rij leiden (gepast). Krediet:Banisetty et al.
"We observeerden de robot en zagen dat hij niet echt bewoog zoals een persoon doet, sociale informatie opnemen en die gebruiken om zijn padplanning te helpen, "Zei Feil-Seifer. "We hebben daarom besloten om een navigatieplanner te maken die informatie over sociale afstand kan gebruiken om sociaal passende bewegingen uit te voeren."
In hetzelfde eerdere onderzoek Feil-Seifer en zijn collega's lieten de robot met succes bepalen of een geplande beweging sociaal geschikt was met behulp van een eenvoudige wiskundige methode die Gaussiaanse mengselmodellen (GMM's) wordt genoemd. Deze methode werkte goed in situaties waarin sociale factoren gemakkelijk konden worden begrepen en weergegeven met behulp van een eenvoudig lineair wiskundig model.
Aangezien de meeste sociale interacties in de echte wereld verschillende factoren omvatten die moeilijk in een lineair model passen, echter, de eenvoudige methode die ze ontwikkelden, zou niet goed generaliseren over verschillende sociale situaties, en in veel gevallen het zou helemaal niet werken. In hun nieuwe studie de onderzoekers besloten daarom de eerder ontwikkelde planner bij te werken om de geplande bewegingen van de robot te optimaliseren, rekening houdend met de niet-lineaire relaties tussen de verschillende sociale eigenschappen waarvan ze wilden dat de robot rekening hield. Dit omvatte het gebruik van een planner met Pareto-concaviteit-eliminatietransformatie (PaCcET).
"De belangrijkste voordelen van onze aanpak zijn dat deze niet-lineaire relaties tussen de verschillende sociale factoren (d.w.z. waar je in een gang bent, waar je bent in relatie tot andere mensen, hoe dicht je bij je doel bent, enz.) rekening houden, ' zei Feil-Seifer.
Feil-Seifer en zijn collega's pasten hun niet-lineaire optimalisatiebenadering toe op verschillende scenario's waarin een robot sociale normen moest respecteren, bijvoorbeeld, door de persoonlijke ruimte van mensen niet binnen te dringen. Ze ontdekten dat hun aanpak in veel van deze scenario's goed werkte, inclusief interacties in een gang, in een kunstgalerie of tijdens het wachten in een cue.
"Een directe vergelijking met andere sociaal bewuste navigatieplanners hebben we nog niet gedaan; dat staat gepland voor de toekomst, zei Feil-Seifer. "Echter, vergeleken met een traditionele planner die geen rekening houdt met sociale dynamiek, de robot geeft een persoon veel meer ruimte bij het passeren in de gang, terwijl we ook doorgaan naar een gewenst doel."
In hun recente studie, de onderzoekers evalueerden hun aanpak in 2D-simulaties op een gesimuleerde PR2-robot en in de echte wereld op een pionier-3DX mobiele robot. Hun bevindingen suggereren dat hun aanpak meerdere interactiescenario's aankan waarbij zowel holonomische als niet-holonomische robots betrokken zijn.
"Praktisch, dit eerste artikel laat zien dat deze methode kan werken, tenminste in een gesimuleerde omgeving, Feil-Seifer zei. "Later werk heeft dit aangetoond in de echte wereld en een breed scala aan sociale scenario's die rekening houden met zowel andere mensen als factoren die verband houden met de omgeving van de robot (d.w.z. interessante plaatsen, zoals schilderijen aan de muur) die ook betrekking hebben op maatschappelijk bewust zijn."
Algemeen, het werk van Feil-Seifer en zijn collega's benadrukt de noodzaak om tools te ontwikkelen om robots meer sociaal bewust te maken om ervoor te zorgen dat ze mensen niet ongemakkelijk maken en zo hun integratie in de samenleving te vergemakkelijken. In de toekomst, de niet-lineaire optimalisatieaanpak die ze ontwikkelden, zou uiteindelijk de adoptie van mobiele robots in kantoren kunnen vereenvoudigen, ziekenhuizen en een verscheidenheid aan andere omgevingen.
"We gaan nu door met het uitbreiden van de mogelijkheden van onze sociaal bewuste navigatieplanner (SAN) om een breder scala aan sociale interacties op te nemen om de sociale context beter te begrijpen, zodat het goed kan beslissen welke doelstellingen prioriteit moeten krijgen, en om het systeem robuuster te laten presteren, Feil-Seifer zei. "We zijn ook van plan om de directe effecten te bestuderen die sociaal bewuste navigatie heeft op mensen die de interactie observeren en hoe dit hun perceptie van de robot beïnvloedt. omdat dit zou helpen om de noodzaak van sociaal bewuste navigatie te valideren."
© 2019 Wetenschap X Netwerk
 Onderzoekers bereiken verbeterde voorspelling van het begin van de Indiase moesson met behulp van machine learning
Onderzoekers bereiken verbeterde voorspelling van het begin van de Indiase moesson met behulp van machine learning- Verbeterde secundaire waas door emissiereductie tijdens COVID-19-lockdown in China
- Bij klimaatomkering, Biden stemt in met nieuwe megaveiling voor olie en gas
- Afbeelding autoclaaf en zijn toepassingen
- Hoe seismometers het luiden van kerkklokken registreren
Hoofdlijnen
- Doorbraak in genetisch onderzoek om gerstproductie te stimuleren
- Een ezelsverhaal:Nigeria wordt de belangrijkste exporthub voor verstoppingen
- Wetenschappers ontwikkelen aardnoot die resistent is tegen aflatoxine
- M-fase: wat gebeurt er in deze fase van de celcyclus?
- Geboortebeperking voor parasieten:onderzoekers onthullen nieuw vaccindoelwit voor malaria
- Genetische aandoeningen: definitie, oorzaken, lijst met zeldzame en veel voorkomende ziekten
- GMO-experimenten
- Superbugs gevonden op Olympische zwemplekken in Rio
- Nieuwe methode maakt bio-ethanol uit afval in bestaande installaties






 Onverwachte wending in een kwantumsysteem
Onverwachte wending in een kwantumsysteem- Wat zijn sommige aanpassingen van een eend?
- Met behulp van computationele chemie om goedkopere infrarood plastic lenzen te produceren
- Geheimen van de verloren gewassen onthuld waar bizons rondlopen
- Chloroplasten zijn de plantencellen die energie produceren
- TIM wint 5G-licenties in Italië
- SpaceX begint Starlink-internet uit te rollen, in de hoop dat het Mars-vluchten zal financieren
- Zwaartekrachtgolven:waarom zoveel gedoe?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
