Wetenschap
Nieuw continuümrobotontwerp bereikt bewegingsresoluties van 1 micron of minder
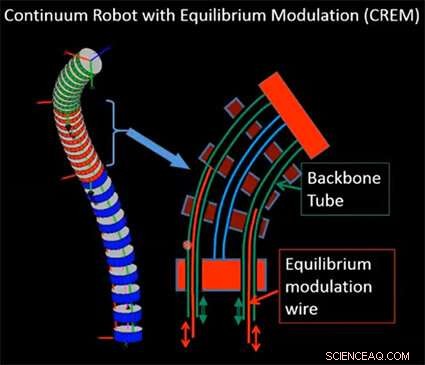
Vergroting van een bestaande macroschaal, robot met meerdere backbones met bewegingsmogelijkheden op micronschaal wordt bereikt door draden (rood) in de structuur toe te voegen die in en uit de buisvormige backbones kunnen schuiven. Dit maakt modulatie van de evenwichtsvorm mogelijk. De robot bereikt nog steeds grootschalige (macro)bewegingen met behulp van de buisvormige secundaire ruggengraat die stevig aan de bovenste rode schijf is bevestigd. Door directe bediening, duwen en trekken aan hen, de configuratie van de continuümrobot verandert. Krediet:Vanderbilt University
Een nieuwe continuümrobot, ontworpen door ingenieurs van Vanderbilt, bereikt beweging op meerdere schalen en kan een enorme wereld openen van voorheen onmogelijke complexe microchirurgie.
De robot kan zowel een grote werkruimte voor macrobewegingen bieden als nodig is voor chirurgische ingrepen, als een werkruimte voor kleine microbewegingen met bewegingsresoluties van 1 micron of minder. Voor een gevoel van schaal, een inch bevat 25, 400 micron. Een menselijke rode bloedcel is ongeveer acht micron breed, even groot als sommige bacteriën en beduidend kleiner dan de breedte van het gemiddelde mensenhaar.
"Ons ontwerp bereikt bewegingsresoluties van 1 micron of minder door goedkope actuatoren te gebruiken. Deze herconfiguratie - met minimale extra kosten - zou de ontwikkeling kunnen versnellen van een nieuwe klasse chirurgische robots die in staat zijn tot zowel macrobewegingen voor chirurgische ingrepen als microschaalbewegingen voor beeldvorming of interventie op cellulair niveau, " zei Nabil Simaan, hoogleraar werktuigbouwkunde en directeur van het Advanced Robotics and Mechanism Applications Laboratory.
"Dit breidt de mogelijkheden van robotica in minimaal invasieve chirurgie aanzienlijk uit, " hij zei.
De miniaturisatie en het bewegingsbereik zouden nauwkeurige controle mogelijk maken tijdens procedures op complexe aneurysma's, kleine aderen en slagaders, zenuwen en de delicate structuren van het oog, het binnenoor en de stembanden. Mogelijke toepassingen zijn biopsieën, tumoruitroeiing en gerichte medicijnafgifte op cellulair niveau.
Simaan en zijn team hebben de flexibele architectuur van zijn vorige continuümrobot aangepast om op macro- en microschaal te presteren door de evenwichtshouding van de robot te veranderen, die Simaan continuümrobots met evenwichtsmodulatie noemt, of CREM.
De flexibele architectuur van eerdere continuümrobots zorgde voor een wormachtige beweging voor macromanipulatie. De robot is gesegmenteerd met schijven of ringen zoals het lichaam van een regenworm. Elke schijf is met elkaar verbonden door kleine ruggengraat, of bedieningsbuizen. Door kleine elastische draden in de bedieningsbuizen toe te voegen en draden omhoog of omlaag te bewegen, het statische evenwicht van de platen verandert, beweging creëren op micrometerschaal.
"Deze nieuwe klasse robots zal microprecisie bieden tijdens het doorkruisen van kronkelige paden op macroschaal naar de operatieplaats. Mogelijke voordelen zijn onder meer exacte weefselreconstructie en volledige chirurgische uitroeiing van tumoren, " zei Simaan, een filiaal van het Vanderbilt Institute for Surgery and Engineering.
De robot maakt gebruik van buisvormige secundaire ruggengraat om de grote schaal van beweging te bereiken. Door ze te duwen en te trekken, de configuratie van de continuümrobot verandert. De toevoeging van draden die in en uit de buisvormige ruggengraat kunnen schuiven, stelde het onderzoeksteam in staat om de evenwichtsvorm te moduleren.
Aanvullend, uitgebreide tests zijn aan de gang voor de integratie van optische coherentietomografie, wat in feite "optische echografie" is waarmee reflecties vanuit het weefsel worden weergegeven.
Simaan en zijn collega's, afgestudeerde student werktuigbouwkunde Giuseppe Del Giudice, Onderzoeksassistent-hoogleraar Oogheelkunde en Visuele Wetenschap Jin-Hui Shen en arts Karen M. Joos, Joseph N. en Barbara H. Ellis Familie Hoogleraar Oogheelkunde, hebben een voorlopige integratie van een op maat gemaakte OCT-sonde bereikt.
Joos' bijzondere onderzoeksinteresse is het gebruik van miniatuur OCT-sondes met robotchirurgische instrumenten om de visualisatie van procedures in het oog te verbeteren. Del Giudice's expertise ligt in het ontwerp en de besturing van medische micro-continuümrobots, specifiek micromanipulatie voor oogheelkundige chirurgie.
Het uitbreiden van de mogelijkheden van een standaard continuümrobot in termen van beweging en richten op microschaal zou een grote impact kunnen hebben in de microchirurgie door aanzienlijk meer behendigheid te bieden, controleerbaarheid en precisie voor chirurgen of zelfs het pionieren van voorheen onmogelijke procedures, zei Simaan.
 Moleculaire chirurgie hervormt levend weefsel met elektriciteit maar zonder incisies
Moleculaire chirurgie hervormt levend weefsel met elektriciteit maar zonder incisies- Energie uit zeewater:stroomgenerator schakelt autonoom tussen twee functionele modi
- Nieuwe fotokatalysator zet koolstofdioxide effectief om in methaanbrandstof met licht
- Geef het de plasmabehandeling:sterke hechting zonder lijmen
- Gebruik van Alum Crystals
- Veganistisch worden om de planeet te redden? Britse show kijkt naar ecokosten van vlees
- Weet jij waar je xenon is? Misschien hangt het rond met ijzer en nikkel in de kern van de aarde?
- Een mobiele overstromingstool voor de natie onthuld
- We zochten naar ontbrekend plastic afval in Zuid-Afrika. Dit hebben we gevonden
- Door thuisblijvende bestellingen wordt de blootstelling aan lawaai bijna gehalveerd
Hoofdlijnen
- Vrouwelijke wetenschappers die de wereld veranderden
- Definitie van celoppervlakte-eiwitten
- Wat zijn de functies van longblaasjes in de longen?
- Hoe te differentiëren tussen mitose en cytokinese
- Door bewijzen gesteunde manieren om gefocust te blijven wanneer u studeert
- Hoe celbrochures te maken
- Genoom van tarwe-voorouder gesequenced
- 25 nieuwe genomen om 25 jaar Sanger Institute te vieren
- Dierlijke versus plantencellen: overeenkomsten en verschillen (met grafiek)
- Renault-baas vecht om autofabrikant op koers te houden

- Startup heeft tot doel de supply chain van lithium-ionbatterijen op te schonen

- eBay's nieuwe Managed Delivery wil wedijveren met Amazon

- Chinees eiland ziet oase van webcensuur voor buitenlanders

- Amerikaans bedrijf Harbor Energy verhoogt bod op het Australische Santos


 Hoe reproduceert een kalkoen?
Hoe reproduceert een kalkoen? - Taal die op creditcardwebsites wordt gebruikt, is het moeilijkst te begrijpen
- Hoe ANOVA te berekenen met de hand
- Vier Galileo-satellieten op weg naar een baan op een enkele Ariane 5-raket
- Student-ingenieurs een interactie tussen twee qubits met behulp van fotonen
- Bosbranden geven tientallen jaren aan verontreinigende stoffen vrij die door bossen worden opgenomen
- Onderzoeksteam verandert nanobuisjes in hardere koolstof voor ruimtevaartuigen satellieten
- Een gedetailleerde simulatie van de luchtstroom na niezen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
