Wetenschap
Vormveranderende robot gebouwd van smarticles toont nieuwe voortbewegingsstrategie
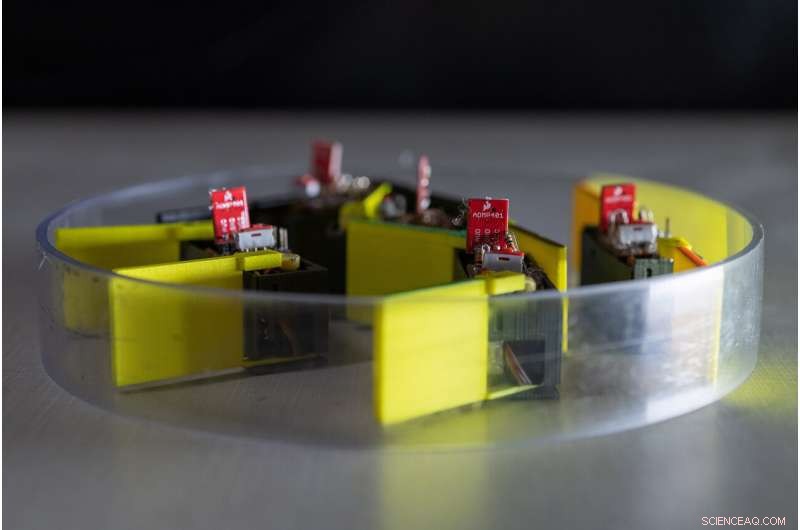
Vijf identieke "smarticles" -- slimme actieve deeltjes -- interageren met elkaar in een behuizing. Door elkaar een duwtje te geven, de groep -- ook wel een "supersmarticle" genoemd -- kan op willekeurige manieren bewegen. Krediet:Georgia Tech, Rob Vilt
Het bouwen van conventionele robots vereist doorgaans een zorgvuldige combinatie van componenten zoals motoren, batterijen, actuatoren, lichaamssegmenten, poten en wielen. Nutsvoorzieningen, onderzoekers hebben een nieuwe benadering gekozen, het bouwen van een robot volledig van kleinere robots die bekend staan als "smarticles" om de principes van een mogelijk nieuwe voortbewegingstechniek te ontgrendelen.
De 3D-geprinte smarticles - een afkorting van slimme actieve deeltjes - kunnen maar één ding doen:met hun twee armen klappen. Maar als vijf van deze smarticles in een cirkel zijn opgesloten, ze beginnen elkaar aan te stoten, het vormen van een robofysisch systeem dat bekend staat als een "supersdeeltje" dat uit zichzelf kan bewegen. Door een licht- of geluidssensor toe te voegen, kan het superdeeltje bewegen als reactie op de stimulus - en zelfs goed genoeg worden gecontroleerd om door een doolhof te navigeren.
Hoewel het nu rudimentair is, het idee om robots te maken van kleinere robots - en gebruik te maken van de groepscapaciteiten die ontstaan door individuen te combineren - zou kunnen zorgen voor mechanisch gebaseerde controle over zeer kleine robots. uiteindelijk, het opkomende gedrag van de groep zou een nieuwe benadering van voortbeweging en controle kunnen bieden voor kleine robots die mogelijk van vorm kunnen veranderen.
"Dit zijn zeer rudimentaire robots waarvan het gedrag wordt gedomineerd door mechanica en de wetten van de fysica, " zei Dan Goldman, een Dunn Family Professor aan de School of Physics van het Georgia Institute of Technology. "We zijn niet op zoek naar geavanceerde controle, sensing en berekening op hen allemaal. Naarmate robots kleiner en kleiner worden, we zullen mechanica en natuurkundige principes moeten gebruiken om ze te beheersen, omdat ze niet het niveau van berekening en detectie hebben dat we nodig hebben voor conventionele controle."
Het onderzoek, die werd ondersteund door het Army Research Office en de National Science Foundation, staat gepland voor publicatie op 18 september in het tijdschrift Wetenschap Robotica . Ook onderzoekers van de Northwestern University droegen bij aan het project.
De basis voor het onderzoek kwam uit een onwaarschijnlijke bron:een studie van bouwnietjes. Door deze heavy-duty nietjes in een container met verwijderbare zijkanten te gieten, voormalig Ph.D. student Nick Gravish - nu een faculteitslid aan de Universiteit van Californië in San Diego - creëerde structuren die op zichzelf zouden staan nadat de wanden van de container waren verwijderd.
Het schudden van de stapeltorens zorgde er uiteindelijk voor dat ze instortten, maar de waarnemingen leidden tot het besef dat eenvoudige verstrengeling van mechanische objecten structuren zou kunnen creëren met mogelijkheden die veel verder gaan dan die van de afzonderlijke componenten.
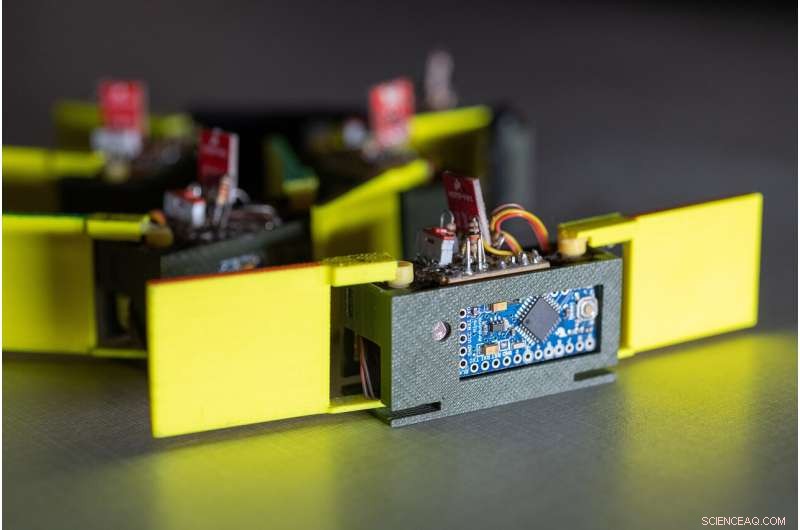
Close-up van een "smarticle" -- slim actief deeltje -- met de twee 3D-geprinte armen, lichtsensor en motor. Krediet:Georgia Tech, Rob Vilt
"Een robot gemaakt van andere rudimentaire robots werd de visie, Goldman zei. "Je zou je kunnen voorstellen een robot te maken waarin je de geometrische parameters een beetje zou aanpassen en wat naar voren komt is kwalitatief nieuw gedrag."
Om het concept te verkennen, afgestudeerde onderzoeksassistent Will Savoie gebruikte een 3D-printer om smarticles op batterijen te maken, die motoren hebben, eenvoudige sensoren en beperkte rekenkracht. De apparaten kunnen hun locatie alleen wijzigen wanneer ze met elkaar communiceren terwijl ze worden omsloten door een ring.
"Hoewel geen enkele robot alleen kan bewegen, de wolk die uit meerdere robots bestaat, kan bewegen terwijl hij zichzelf uit elkaar duwt en krimpen als hij zichzelf samentrekt, " legde Goldman uit. "Als je een ring om de wolk van kleine robots legt, ze beginnen elkaar in het rond te schoppen en de grotere ring - wat we een superdeeltje noemen - beweegt willekeurig rond."
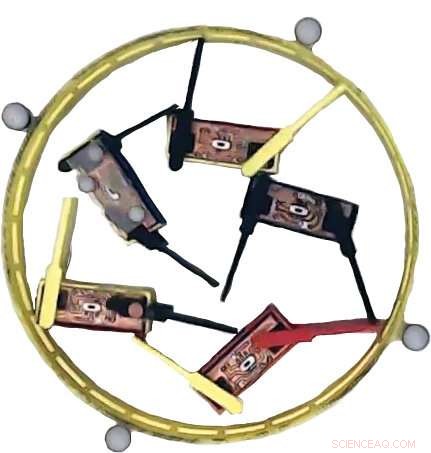
Een superartikel. Krediet:Savoie et al., Wetenschap. Robot. 4, eaax4316 (2019)
De onderzoekers merkten dat als een kleine robot stopte met bewegen, misschien omdat de batterij leeg was, de groep smarticles zou beginnen te bewegen in de richting van die vastgelopen robot. Afgestudeerde student Ross Warkentin leerde de beweging te beheersen door fotosensoren toe te voegen aan de robots die het klapperen van de arm stoppen wanneer een sterke lichtstraal een van hen raakt.
"Als je de zaklamp precies goed richt, u kunt de robot markeren die u inactief wilt maken, en dat zorgt ervoor dat de ring er naar toe of van af beweegt, ook al zijn er geen robots geprogrammeerd om naar het licht toe te bewegen, Goldman zei. "Dat maakte het mogelijk om het ensemble in een zeer rudimentaire, stochastische manier."
Professor Kurt Wiesenfeld van de School of Physics en afgestudeerde student Zack Jackson hebben de beweging van deze smarticles en supersmarticles gemodelleerd om te begrijpen hoe de duwtjes en de massa van de ring de algehele beweging beïnvloedden. Onderzoekers van de Northwestern University bestudeerden hoe de interacties tussen de smarticles voor directionele controle zorgden.
"For many robots, we have electrical current move motors that generate forces on parts that collectively move a robot reliably, " said Todd Murphey, a professor of mechanical engineering who worked with Northwestern graduate students Thomas Berrueta and Ana Pervan. "We learned that although individual smarticles interact with each other through a chaos of wiggling impacts that are each unpredictable, the whole robot composed of those smarticles moves predictably and in a way that we can exploit in software."
Bij toekomstig werk, Goldman envisions more complex interactions that utilize the simple sensing and movement capabilities of the smarticles. "People have been interested in making a certain kind of swarm robots that are composed of other robots, " he said. "These structures could be reconfigured on demand to meet specific needs by tweaking their geometry."
The project is of interest to the U.S. Army because it could lead to new robotic systems capable of changing their shapes, modalities and functions, said Sam Stanton, program manager, complex dynamics and systems at the Army Research Office, an element of U.S. Army Combat Capabilities Development Command's Army Research Laboratory.
"Future Army unmanned systems and networks of systems are imagined to be capable of transforming their shape, modality and function. Bijvoorbeeld, a robotic swarm may someday be capable of moving to a river and then autonomously forming a structure to span the gap, " he said. "Dan Goldman's research is identifying physical principles that may prove essential for engineering emergent behavior in future robot collectives as well as new understanding of fundamental trade-offs in system performance, responsiveness, uncertainty, resiliency and adaptivity."
 Oneindig recyclebaar polymeer toont praktische eigenschappen van kunststoffen
Oneindig recyclebaar polymeer toont praktische eigenschappen van kunststoffen- Waarom is warm water minder dicht dan koud water?
- Tandemkatalysator om de elektroreductie van kooldioxide tot methaan te verbeteren
- Kenmerken van lipidemoleculen definiëren
- Neutronen onthullen verborgen geheimen van het hepatitis C-virus
- Zoals we waren – klimaat en menselijke evolutie
- Luchtvervuiling kost 600 mensenlevens, 000 kinderen per jaar:WIE
- Dodental tyfoon Lekima stijgt tot 44 in Oost-China (update)
- NASA volgt tropische cycloon Oma terwijl er waarschuwingen blijven voor Vanuatu
- Regen of sneeuw? Vochtigheid, locatie kan het verschil maken, nieuwe kaart toont
Hoofdlijnen
- 10 onderzoeken die compleet bizarre dingen met elkaar verbinden
- Een niet-verslavende opioïde pijnstiller zonder bijwerkingen
- Uitgebreide quota voor blauwvintonijn kunnen het herstel ongedaan maken:wetenschappers
- Wat is Ceramide?
- Kolonies tellen in de microbiologie
- Nieuwe mutaties in iPS-cellen zijn voornamelijk geconcentreerd in niet-transcriptionele regio's
- Kevers felle kleuren gebruikt voor camouflage in plaats van roofdieren te waarschuwen
- Je lichaam aan: een hittegolf
- Wetenschappers creëren op verzoek endocytose door cellen warm te bedraden
- Onderdelen van mijnbouwbacteriën om 24 uur per dag biosensoren te bouwen

- GE verloor miljarden door hernieuwbare energiebronnen verkeerd in te schatten:rapport

- China benoemt en beschaamt techreuzen voor app-privacyschendingen

- Jet Airways sluit bod Air India uit

- Minder getroffen door Marriott-hack, maar paspoorten een rode vlag


 Wetenschappers produceren radioactiviteitvrije Tsjernobyl-wodka
Wetenschappers produceren radioactiviteitvrije Tsjernobyl-wodka- Paren van silicium nanocilinders kunnen het magnetische veld van licht lokaal creëren en verbeteren
- Olieopruiming begint nadat vrachtschepen bij Corsica in aanvaring komen
- Verrassende elektronische wanorde in keramiek op koperoxidebasis
- Heeft klimaatverandering invloed op de vastgoedprijzen? Alleen als je erin gelooft
- Dubbel gevaar:de hoge kosten van levensonderhoud in de sloppenwijken van Nairobis
- Afstembare metasurface is verwant aan optisch Zwitsers zakmes
- Long Division Games voor 5th Graders
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
