Wetenschap
Kunstspieren bloeien, dans, en zwaaien
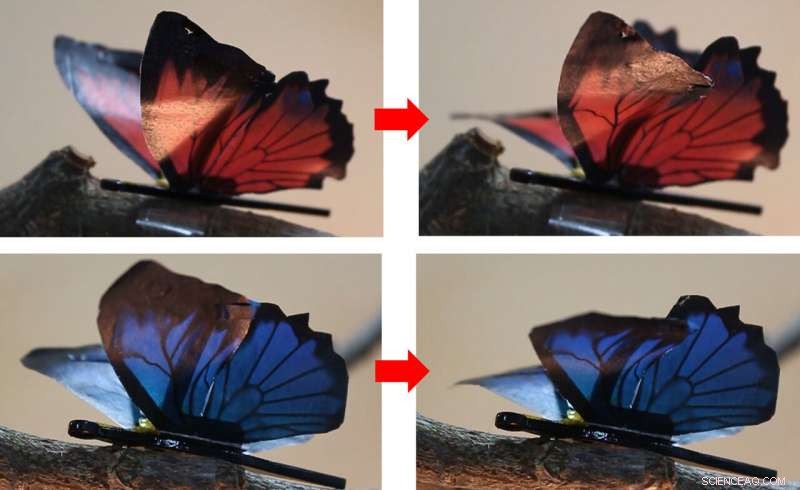
Dansende vlinderrobots op boomtak. De vlinders kunnen met hun vleugels fladderen na toepassing van 2 Volt wisselstroom ingang met een frequentie van 0,2 Hertz. Krediet:Umrao et al., Wetenschap. Robot. 4, eaaw7797 (2019)
Het dragen van een bloemenbroche die voor je ogen bloeit, klinkt als magie. KAIST-onderzoekers hebben het echt gemaakt met robotspieren.
Onderzoekers hebben een ultradunne, kunstmatige spier voor zachte robotica. De vooruitgang, onlangs gerapporteerd in het tijdschrift Wetenschap Robotica , werd gedemonstreerd met een robotachtige bloeiende bloemenbroche, dansende robotvlinders en fladderende boombladeren op een kinetisch kunstwerk.
Het robotequivalent van een spier die kan bewegen, wordt een actuator genoemd. De actuator breidt uit, samentrekt of roteert als spiervezels met behulp van een stimulus zoals elektriciteit. Ingenieurs over de hele wereld streven ernaar om meer dynamische actuatoren te ontwikkelen die snel reageren, kan buigen zonder te breken, en zijn zeer duurzaam. Zacht, robotspieren kunnen een breed scala aan toepassingen hebben, van draagbare elektronica tot geavanceerde protheses.
Het team van KAIST's Creative Research Initiative Center for Functionally Antagonistic Nano-Engineering ontwikkelde een zeer dunne, snel reagerend, flexibele en duurzame kunstmatige spier. De actuator ziet eruit als een dunne strook papier van ongeveer 2,5 cm lang. Ze gebruikten een bepaald type materiaal genaamd MXene, dat is een klasse van verbindingen met lagen van slechts enkele atomen dik.
-

Vergelijking van echte narcissenbloem (boven) en kunstmatige spiergebaseerde narcissenrobot (onder) in verschillende bloeistadia. Krediet:Umrao et al., Wetenschap. Robot. 4, eaaw7797 (2019)
-
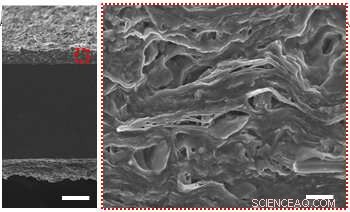
Cross-sectionele scanning-elektronenmicroscopie van MXene en PEDOT:PSS-materiaal. Krediet:Umrao et al., Wetenschap. Robot. 4, eaaw7797 (2019)
Hun gekozen MXene-materiaal (Ti 3 C 2 t x ) is gemaakt van dunne lagen titanium en koolstofverbindingen. Het was op zichzelf niet flexibel; vellen materiaal zouden van de actuator afbladderen wanneer ze in een lus worden gebogen. Dat veranderde toen de MXene "ionisch verknoopt" was - verbonden via een ionische binding - met een synthetisch polymeer. De combinatie van materialen maakte de actuator flexibel, met behoud van sterkte en geleidbaarheid, wat van cruciaal belang is voor bewegingen die worden aangedreven door elektriciteit.
Hun specifieke combinatie presteerde beter dan anderen meldden. Hun actuator reageerde zeer snel op lage spanning, en duurde meer dan vijf uur ononderbroken bewegen.
Om te bewijzen dat de kleine robotspier werkt, het team verwerkte de actuator in draagbare kunst:een origami-geïnspireerde broche bootst na hoe een narcisbloem zijn bloembladen ontvouwt wanneer een kleine hoeveelheid elektriciteit wordt toegepast. Ze ontwierpen ook robotvlinders die hun vleugels op en neer bewegen, en deed de bladeren van een boomsculptuur fladderen.
"Draagbare robotica en kinetische kunst laten zien hoe robotspieren leuke en mooie toepassingen kunnen hebben, " zei Il-Kwon Oh, lead paper auteur en hoogleraar werktuigbouwkunde. "Het toont ook het enorme potentieel voor kleine, kunstmatige spieren voor een verscheidenheid aan toepassingen, zoals haptische feedbacksystemen en actieve biomedische apparaten."
Het team is van plan om meer praktische toepassingen van op MXene gebaseerde zachte actuatoren en andere technische toepassingen van MXene 2D-nanomaterialen te onderzoeken.
 Fossiele bomen op het centrale Andesplateau van Peru vertellen een verhaal over dramatische veranderingen in het milieu
Fossiele bomen op het centrale Andesplateau van Peru vertellen een verhaal over dramatische veranderingen in het milieu- Eerste proefvaarten van een revolutionaire nieuwe onderzeese robot
- Aardbeving met een kracht van 5,7 op de schaal van Richter schudt het hoofdeiland van de Filipijnen door elkaar:USGS
- Negen dingen waar je van houdt die worden verwoest door klimaatverandering
- Krachtige aardbeving wekt mensen uit hun slaap in Zuid-Filippijnen
Hoofdlijnen
- Hoe maak je een gedetailleerd menselijk hersensmodel uit Clay
- Tabaksplanten als levensredders
- Genetisch verhogen van de voedingswaarde van maïs kan miljoenen ten goede komen
- Wat zijn de zuignappen op een Octopus genaamd?
- DNA-klonen: definitie, proces, voorbeelden
- Wat is de Marshmallow-test en kunnen dieren deze doorstaan?
- Kune Kune-biggen beschikken over sociale leervaardigheden en hebben een verbazingwekkend goed geheugen
- CRISPR gebruiken om warmer te maken, minder vette varkens
- Monster ontdekt in het Canadese Noordpoolgebied
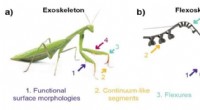
- Flexoskeleton printen:flexibele exoskeletten fabriceren voor op insecten geïnspireerde robots
- Nieuwe chip brengt ultra-low power Wi-Fi-connectiviteit naar IoT-apparaten

- Republikeinen in de Amerikaanse senaat verlagen bod om ZTE-deal van Trump te blokkeren

- Een gids voor pokerzwendel – hoe je niet gestoken wordt

- LG buigt oprolbare tv als schermen beginnen te buigen


 MITs Robogami wil dat je op origami geïnspireerde,
MITs Robogami wil dat je op origami geïnspireerde, - Gedraaide kristallen wijzen de weg naar actieve optische materialen
- Hoe weggooien van Acid
- Klimaatverandering kan van de Arctische toendra een droger landschap maken
- Diepduikende robots ontdekken dat de opwarming in de wateren van de Stille Zuidzee versnelt
- Onderzoekers zoeken donkere materie dicht bij huis
- Feniciden meteorenregen van dode komeet weer waargenomen na 58 jaar
- Informele werknemers over de hele wereld worden geconfronteerd met een gestapeld dek, maar arbeidsorganisatie heeft tot overwinningen geleid
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
