Wetenschap
Techniek maakt gebruik van magneten, licht om zachte robots te besturen en opnieuw te configureren
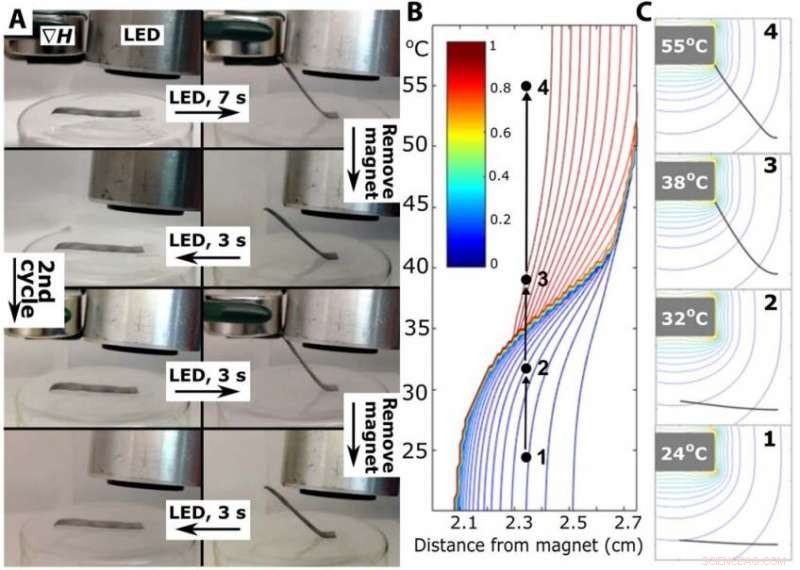
Vormgeheugen cantilever met geketende magnetische deeltjes. (A) bediening en (B en C) simulaties van een DiAPLEX cantilever film met geketende magnetische deeltjes. De permanente magneet (∇H) en LED worden aangegeven in het paneel linksboven. (B) De contouren tonen de mate van bediening (0, vlak; 1, contactmagneet) van een gesimuleerd filament over een reeks posities en temperaturen. (C) gesimuleerde stilstaande beelden komen overeen met discrete punten langs het pad aangegeven in (B), op een afstand van 2,3 cm van de magneet, wat consistent is met de experimentele geometrie aan de linkerkant. Zie films S1 en S2 voor experimenten en simulaties van de cantilever. Krediet:Jessica A.-C. Liu, Staatsuniversiteit van Noord-Carolina.
Onderzoekers van North Carolina State University en Elon University hebben een techniek ontwikkeld waarmee ze op afstand de beweging van zachte robots kunnen besturen. vergrendel ze zo lang als nodig is en configureer de robots later opnieuw in nieuwe vormen. De techniek is gebaseerd op licht en magnetische velden.
"We zijn vooral enthousiast over de herconfigureerbare, " zegt Joe Tracy, een professor in materiaalkunde en techniek bij NC State en corresponderende auteur van een paper over het werk. "Door de eigenschappen van het materiaal te ontwikkelen, we kunnen de beweging van de zachte robot op afstand besturen; we kunnen ervoor zorgen dat het een bepaalde vorm behoudt; we kunnen de robot dan terugbrengen naar zijn oorspronkelijke vorm of zijn beweging verder aanpassen; en we kunnen dit herhaaldelijk doen. Al die dingen zijn waardevol, in termen van het nut van deze technologie in biomedische of ruimtevaarttoepassingen."
Voor dit werk, de onderzoekers gebruikten zachte robots gemaakt van een polymeer ingebed met magnetische ijzermicrodeeltjes. Onder normale omstandigheden, het materiaal is relatief stijf en behoudt zijn vorm. Echter, onderzoekers kunnen het materiaal opwarmen met licht van een light-emitting diode (LED), wat het polymeer buigzaam maakt. Eenmaal plooibaar, onderzoekers toonden aan dat ze de vorm van de robot op afstand konden besturen door een magnetisch veld aan te leggen. Na het vormen van de gewenste vorm, onderzoekers konden het LED-licht verwijderen, waardoor de robot zijn oorspronkelijke stijfheid kan hervatten - waardoor de vorm effectief op zijn plaats wordt vergrendeld.
Door het licht een tweede keer toe te passen en het magnetische veld te verwijderen, de onderzoekers zouden de zachte robots kunnen laten terugkeren naar hun oorspronkelijke vorm. Of ze kunnen het licht opnieuw toepassen en het magnetische veld manipuleren om de robots te bewegen of ze nieuwe vormen aan te laten nemen.
Bij experimentele testen, de onderzoekers toonden aan dat de zachte robots kunnen worden gebruikt om "grijpers" te vormen voor het optillen en vervoeren van objecten. De zachte robots kunnen ook als uitkragingen worden gebruikt, of gevouwen tot "bloemen" met bloemblaadjes die in verschillende richtingen buigen.
"We zijn niet beperkt tot binaire configuraties, zoals een grijper die open of gesloten is, " zegt Jessica Liu, eerste auteur van het papier en een Ph.D. student aan NC State. "We kunnen het licht regelen om ervoor te zorgen dat een robot op elk punt zijn vorm behoudt."
In aanvulling, de onderzoekers ontwikkelden een rekenmodel dat kan worden gebruikt om het ontwerpproces van zachte robots te stroomlijnen. Met het model kunnen ze de vorm van een robot verfijnen, polymeer dikte, de overvloed aan ijzermicrodeeltjes in het polymeer, en de grootte en richting van het vereiste magnetische veld voordat een prototype wordt gebouwd om een specifieke taak te volbrengen.
"De volgende stappen zijn onder meer het optimaliseren van het polymeer voor verschillende toepassingen, " zegt Tracy. "Bijvoorbeeld, technische polymeren die reageren bij verschillende temperaturen om te voldoen aan de behoeften van specifieke toepassingen."
De krant, "Fotothermisch en magnetisch gecontroleerde herconfiguratie van polymeercomposieten voor zachte robotica, " verschijnt in het journaal wetenschappelijke vooruitgang . Eerste auteur van het artikel is Jessica Liu, een doctoraat student aan NC State. Het papier is co-auteur van Jonathan Gillen, een voormalig student aan NC State; Sumeet Mishra, een voormalig Ph.D. student bij NC State; en Benjamin Evans, een universitair hoofddocent natuurkunde aan de Elon University.
 Onderzoekers pionieren op een groenere manier om verweven polymeren te maken met blauw licht
Onderzoekers pionieren op een groenere manier om verweven polymeren te maken met blauw licht- Een detectiveverhaal over bosbranden en wijn
- Onderzoekers publiceren routekaart om datawetenschap en kunstmatige intelligentie te benutten voor elektronenmicroscopie
- Ontwikkeling van nieuwe fotovoltaïsche commercialiseringstechnologie
- Een experiment voorgesteld door een Ph.D. student mag scheikundeboeken herschrijven
- China's waterkracht-razernij verdrinkt heilige bergen
- China verbiedt buitenlands afval - maar wat gebeurt er met de recycling van de wereld?
- Waarom worden jeneverbomen genoemd cederbomen?
- Onderzoekers overwinnen uitdagingen om nieuwe tyfoonwaarnemingen te verzamelen
- De combinatie van waterschaarste en een starre vraag brengt de stroomgebieden van de wereld in gevaar
Hoofdlijnen
- Hoe DNA te maken met pijpreinigers & pony kralen
- Wat is het geheim van geluk?
- Algemene kenmerken van Protista
- Vogelgriep:Nederlandse boeren moeten pluimvee binnen houden
- Wat levert elektronen voor de lichtreacties?
- Wat zijn specifieke biotechnologietoepassingen voor DNA-vingerafdrukken?
- eDNA-tool detecteert invasieve mosselen voordat ze hinderlijk worden
- Dansgerelateerde wetenschapsprojecten
- Hoe slaaplabs werken
- Mensen centraal stellen bij big data

- Locatie en merk beïnvloeden het vertrouwen van mensen in cloudservices

- Toshiba CEO belooft ommekeer in vijf jaar, versterkte ethiek

- Onderzoek naar gegevensverzameling door Google komt te midden van toegenomen toezicht op digitale privacy

- Kom maar op met de technologieverboden


 Fragmenten van de Dode Zeerol in The Museum of the Bible bleken nep te zijn
Fragmenten van de Dode Zeerol in The Museum of the Bible bleken nep te zijn- Onderzoekers vinden natuurlijk voorkomende fotostromen in anorganische minerale systemen
- Biology Science Fair Projects
- Betrouwbare simulatie van polyurethaanschuim
- Terugkerend naar de wortels van de landbouw in de strijd tegen de kever van een miljard dollar
- Griekenland:nieuw bod om prehistorische technische prestatie te begrijpen
- Wanneer kleine robot door je kamers gaat om de oranje portemonnee te vinden
- Turkije onthult ruimteprogramma inclusief maanmissie 2023
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
