Wetenschap
Robots stappen op om die grote, slechte sintelblokken te verslaan
We zullen, ieder naar zijn eigen smaak. Kittens die bevriend raken met bollen garen zijn absolute magneten voor videosurfers, maar een rivaliserend leger van videokliksters kan nooit maximaal staren naar mensachtigen die navigeren waar ze heen willen.
De nieuwste video waarin humanoïde robots in beweging worden getoond, maakt indruk op kijkers met de behendige en succesvolle manier waarop ze door een doolhof van sintelblokken navigeren.
De video over de laatste is IHMC, het Instituut voor Mens en Machine Cognitie (IHMC).
"Om door een rommelige en gecompliceerde omgeving te lopen, " zei het team, robots met poten moeten uitzoeken waar ze hun voeten kunnen neerzetten. Extra uitdaging:dit moet snel gebeuren, of het terrein vlak of complex is.
IHMC's autonome footstep planning-programma is aan het werk op zowel de robot van Boston Dynamics, en door NASA ontwikkelde Valkyrie.
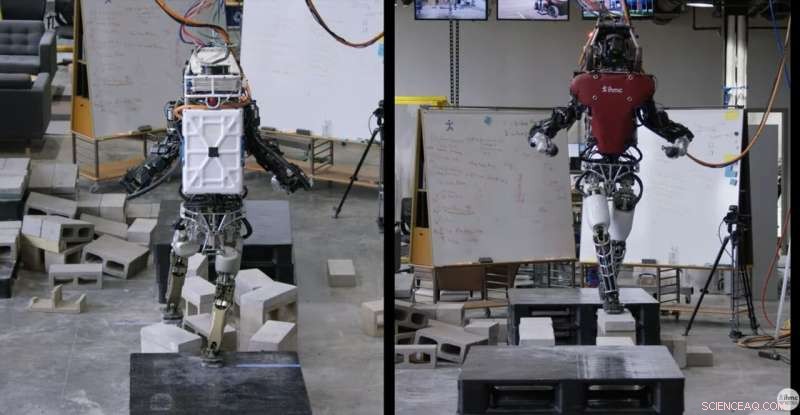
Het team gebruikte de twee robots, de Atlas (Boston Dynamics) en de Valkyrie (NASA Johnson Space Center) voor de meest recente showcase. Een ander belangrijk kenmerk was zijn 'hoofd'.
"De methode gebruikt de sensoren van de machines om het meest efficiënte pad naar een door de mens geselecteerde locatie te bepalen, " zei TNW.
"In deze video, " zei de verteller, "we gebruiken de Carnegie Robotics MultiSense SL-kop om een puntenwolk van de omgeving te genereren. Door deze puntenwolk te segmenteren in vlakke gebieden, we vertegenwoordigen de enorme hoeveelheid gegevens die afkomstig zijn van de waarnemingssensoren in een veel compactere vorm."
Ze hebben deze vlakke gebieden verder ontleed in een verzameling polygonen. Engadget :"Elke sectie wordt vervolgens geïnterpreteerd in een reeks polygonen om een model van de omgeving te creëren, zodat de robot elk van zijn stappen kan plannen om van zijn startpunt naar zijn doel te komen."
Het IHMC-team, tijdens de DARPA-uitdaging, had eerder de Atlas-robot gebruikt. Een telefoniste regisseerde Atlas. Voetstappen werden in de interface geplaatst. Het proces verliep traag en legde een last op de operator. Een ander nadeel was dat het plaatsen van individuele voetstappen foutgevoelig was. Atlas viel op de eerste dag van de finalewedstrijd.
Deze keer, om menselijke fouten te omzeilen, het nieuwe systeem liet een operator de gewenste locatie selecteren, zei TNW , "maar vertrouwt uiteindelijk op een algoritme om erachter te komen hoe de robot daar kan komen en obstakels kan vermijden."
"In principe, IHMC beheert deze complexe navigatiebewerkingen door een begin- en eindpunt voor de robot op te geven, " zei Darrell Etherington in TechCrunch , "en vervolgens stap voor stap alle mogelijke paden in kaart brengen, het evalueren van de kosten van elk en uiteindelijk tot het best mogelijke pad komen - wat allemaal relatief snel kan gebeuren op moderne hardware."
In een videoscène van het testen is te zien hoe het team de robot over een reeks sintelblokken laat lopen, waar er maar weinig houvast is. Ze kunnen ook paden plannen waar de robot geen andere keuze heeft dan slechts gedeeltelijke steunpunten te gebruiken.
Momenteel, zeiden ze in hun videonotities, smal terrein heeft een slagingspercentage van ongeveer 50 procent, ruw terrein is ongeveer 90 procent, terwijl vlakke grond bijna 100 procent is.
Pittsburgh, Carnegie Robotics uit Pennsylvania, In de tussentijd, is een leverancier van geavanceerde robotica-sensoren en -platforms. De originele MultiSense SL was de favoriete sensor van Atlas humanoïde robots in de DARPA Robotics Challenge (DRC). Als het mensachtige hoofd, de SL leverde de meeste perceptuele gegevens die werden gebruikt voor teleoperaties en geautomatiseerde besturing.
Wat is het volgende?
"We zijn van plan de snelheid van de planner te verhogen en de mogelijkheid om door doolhoven en ongeziene doelen te plannen, ', zeiden ze in de videonotities.
Het is duidelijk dat het team doorgaat met pogingen om het lopen op twee benen te overwinnen.
IHMC-team verklaarde dat.
"Onze humanoïde projecten zijn erop gericht onze tweevoetige humanoïde capaciteiten naar voren te schuiven om ruw terrein aan te kunnen zonder enige kennis van de omgeving door sensoren aan boord... We richten ons ook op het vermogen om externe verstoringen robuust aan te pakken. Ons doel is om steeds moeilijker aan te pakken loopuitdagingen."
De video en het papier zijn ingediend bij het Humanoids 2019 - International Conference on Humanoid Robots-evenement dat later dit jaar zal plaatsvinden.
© 2019 Wetenschap X Netwerk
 Continu ademend metaal-organisch raamwerk met gastselectiviteit
Continu ademend metaal-organisch raamwerk met gastselectiviteit- Een nieuwe manier om zachte robots te maken:DNA-triggers die ervoor zorgen dat hydrogels van vorm veranderen
- Microgolven onthullen gedetailleerde structuur van moleculaire motor
- Onderzoek naar oxidatieve routes in nucleaire brandstof
- Het verschil tussen polyethyleen en PVC
- Olie- en gasemissies een belangrijke oorzaak van slechte ozondagen
- Pijn tijdens genezing:ziekenhuispersoneel ontheemd door bosbrand
- 2018 was een van de warmste jaren ooit en dit jaar zou nog heter kunnen worden
- Slimme steden en de kwaliteit van leven in Gauteng . na de apartheid
- Wat is de primaire functie van de galblaas?
Hoofdlijnen
- Wat is de functie van aerobe ademhaling?
- Zenuwen controleren de bacteriële gemeenschap van het lichaam
- Kenmerken van nucleïnezuren
- Het verschil tussen orthologe en paralogische genen
- Prehistorische vrouwen waren sterker dan de elite vrouwelijke atleten van vandaag
- Microbiële ziekten en mutaties: wat is het ?, Lijsten & Oorzaken
- Mensen evolueren nog steeds - Heres the Evidence
- Een grote stap in de richting van het verminderen van streptokokken bij op de boerderij gekweekte tilapia
- Recombinante DNA-technologie voor vaccinontwikkeling
- Onderzoekers laten zien wat er kan gebeuren als een drone in botsing komt met een vliegtuig

- Record-setting overdracht van 1 petabyte aan gegevens

- Londense luchthaven Gatwick verkocht aan Frans Vinci-conglomeraat (update)

- Hoe smartphones uw identiteit kunnen verifiëren

- Maak kennis met blauw, de goedkope, mensvriendelijke robot ontworpen voor AI


 Geïnspireerd door spinnenwebben, onderzoekers vangen zoet water op met een dampopvangsysteem
Geïnspireerd door spinnenwebben, onderzoekers vangen zoet water op met een dampopvangsysteem- De voor- en nadelen van reflecterende telescopen
- Hoe de hoekdiameter van de Sun
- Onderzoekers onthullen een nieuw metaal waar elektronen stromen met vloeistofachtige dynamiek
- Biologen ontdekten de paden van groepen van de lophopoor
- De kleinste onvolkomenheden hebben een grote impact op materialen met nanopatronen
- EU-functionarissen keuren snelheidsbeperkingstechnologie voor auto's goed
- Wetenschappers beginnen met het bouwen van een zeer nauwkeurige digitale tweeling van onze planeet
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
