Wetenschap
Robotarm smaakt naar gemanipuleerde bacteriën
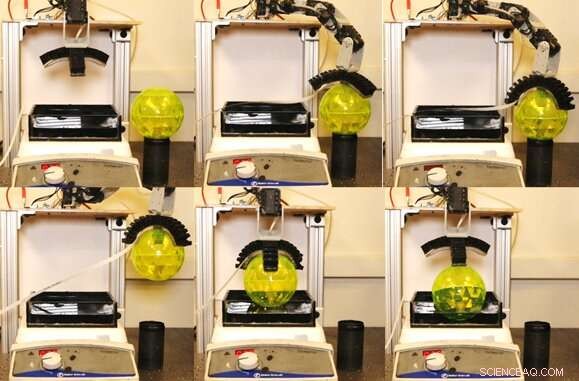
Deze robotgrijparm gebruikt kunstmatige bacteriën in putjes in zijn vingers om naar een specifieke chemische stof te 'proeven' voordat hij beslist of hij de bal oppakt en in het bad legt. Het systeem is ontwikkeld door ingenieurs van UC Davis en Carnegie Mellon University. Credit:Tess Hellebrekers, Soft Machines Lab, Carnegie Mellon Universiteit
Een robotachtige grijparm die gemanipuleerde bacteriën gebruikt om naar een specifieke chemische stof te "proeven", is ontwikkeld door ingenieurs van de Universiteit van Californië, Davis, en Carnegie Mellon University. De grijper is een proof-of-concept voor biologisch gebaseerde zachte robotica.
"Onze langetermijnvisie gaat over het bouwen van een synthetische microbiota voor zachte robots die kunnen helpen bij reparatie, energieopwekking of biosensing van het milieu, " zei Cheemeng Tan, assistent-professor biomedische technologie aan UC Davis. Het werk werd op 26 juni gepubliceerd in het tijdschrift Wetenschap Robotica .
Zachte robotica maakt gebruik van lichtgewicht, flexibele en zachte materialen om machines te maken die passen bij de veelzijdigheid van levende wezens, en zachte robotontwerpen halen vaak inspiratie uit de natuur. Het toevoegen van echte levende cellen aan zachte robots brengt wetenschappers weer een stap dichter bij het creëren van biologisch-mechanische hybride machines.
"Door ons werk in flexibele elektronica en robothuid te combineren met synthetische biologie, we zijn dichter bij toekomstige doorbraken zoals zachte biohybride robots die hun capaciteiten kunnen aanpassen aan zintuigen, voelen en bewegen als reactie op veranderingen in hun omgevingsomstandigheden, " zei Carmel Majidi, een co-auteur en universitair hoofddocent werktuigbouwkunde bij CMU.
Biosensing met gemanipuleerde bacteriën
Het nieuwe apparaat maakt gebruik van een biosensing-module op basis van E. coli-bacteriën die zijn ontwikkeld om te reageren op de chemische IPTG door een fluorescerend eiwit te produceren. De bacteriecellen verblijven in putjes met een flexibele, poreus membraan dat chemicaliën doorlaat, maar de cellen binnen houdt. Deze biosensing-module is ingebouwd in het oppervlak van een flexibele grijper op een robotarm, zodat de grijper via zijn vingers de omgeving kan "proeven".
-

Fluorescerende eiwitten tot expressie gebracht door bacteriën op de door bacteriën bediende robotgrijper. Krediet:Justus et al., Wetenschap. Robot. 4, eaax0765 (2019)
-
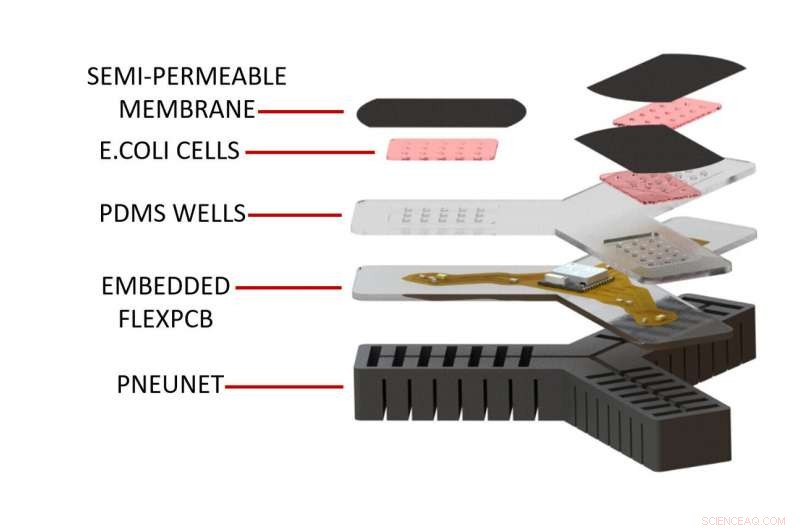
Gedeconstrueerd beeld van de door bacteriën bediende robotgrijper. Krediet:Tess Hellebrekers
-

Een samenwerking in flexibele elektronica en synthetische biologie leverde dit zachte, robot grijper. De technologie brengt wetenschappers een stap dichter bij het creëren van biologisch-mechanische hybride machines. Credit:Tess Hellebrekers, Soft Machines Lab, Carnegie Mellon Universiteit
Wanneer IPTG het membraan in de kamer passeert, de cellen fluoresceren en elektronische circuits in de module detecteren het licht. Het elektrische signaal gaat naar de regeleenheid van de grijper, die kan beslissen of ze iets oppakken of vrijgeven.
Als proef, de grijper kon een laboratoriumwaterbad controleren op IPTG en vervolgens beslissen of hij een object in het bad wilde plaatsen.
Tot dusver, deze biohybride bot kan maar één ding proeven en het is moeilijk om systemen te ontwerpen die veranderende concentraties kunnen detecteren, zei Tan. Een andere uitdaging is het in stand houden van een stabiele populatie microben in, of op, een robot - vergelijkbaar met het microbioom of ecosysteem van bacteriën en schimmels die in of op ons eigen lichaam leven en veel nuttige functies voor ons vervullen.
Biohybride systemen bieden mogelijk meer flexibiliteit dan conventionele robotica, hij zei. Bacteriën kunnen worden ontworpen voor verschillende functies op de robot:het detecteren van chemicaliën, polymeren maken voor reparaties of energieopwekking, bijvoorbeeld.
 Slime voor kinderen maken zonder Borax, kleurstof voor levensmiddelen en witte lijm
Slime voor kinderen maken zonder Borax, kleurstof voor levensmiddelen en witte lijm - Noedels verrijkt met voedingsvezels door geavanceerde technologie blijven lekker
- EPDM sluitring ten opzichte van nitril rubberen ring
- Ideale methode voor het snel testen van ziekten
- Hoe vissen homeostase handhaven bij verschillende watertemperaturen
- Is vrachtvervoer per spoor en water beter voor het milieu?
- Wanneer virussen fytoplankton infecteren, het kan de wolken veranderen
- Waarom voedingskeuzes een impact hebben op de wereldwijde fauna en menselijke populaties
- Een Californische vulkaan vernietigde ooit een bos en stuwde as 280 mijl voort. Experts zeggen dat het een waarschuwing biedt
- Agrochemici vinden bewijs voor de ferro-wielhypothese
Hoofdlijnen
- Wat is de Western Blot-test?
- Biologen maken kever met functioneel extra oog
- Vreemde ondernemingen:mierenkoninginnen begraven doden om ziekte te voorkomen
- What Is Crossing Over in Genetics?
- Welke koninkrijken zijn heterotroof en autotroof?
- Hoe orchideeën werken
- Beschrijving van de basisfuncties van enzymen in cellen
- Klimaatveranderingen verkorten de mariene voedselketen voor de kust van Californië
- Zwavelademhaling bij zoogdieren
- Een moreel kompas ontwikkelen op basis van menselijke teksten

- Initiatieven om het Amerikaanse energienetwerk en kernwapensystemen te beschermen

- Voor Generatie Z, iPhone, Apple heeft de meeste buzz terwijl Coke en Pepsi bruisen

- Alibabas Zhang bereidt zich voor om uit de schaduw van Jack Mas te stappen

- WarnerMedia benoemt voormalig Hulu-chef Jason Kilar tot CEO


 Nieuwe tool geeft onderzoekers beter zicht op online anonieme marktplaatsen
Nieuwe tool geeft onderzoekers beter zicht op online anonieme marktplaatsen- Waterverplaatsing gebruiken om Volume
- Waarom hebben de Noord- en Zuidpool geen tijdzones?
- Hoe methaangas te detecteren
- Wanneer gemak en bewaking samenkomen:AI in de winkel op de hoek
- Wereldbank spoort steden aan om te investeren in nieuwe infrastructuur om zich aan te passen aan klimaatverandering
- NASA's Webb-telescoop hervat trillingstests in januari
- Hoe een kleine Curiosity-motor een enorme stofstorm op Mars identificeerde
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Swedish | German | Dutch | Danish | Norway | Spanish | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
