Wetenschap
Geen montage vereist:onderzoekers automatiseren microrobotische ontwerpen
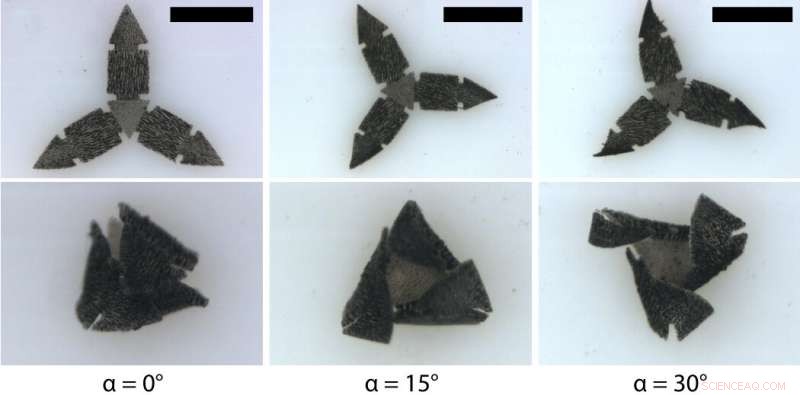
Bovenaanzicht afbeeldingen van de tri-arm zachte magnetische structuren die verschillende magnetisatieprofielen dragen. Krediet:Xu et al., Wetenschap. Robot. 4, eaav4494 (2019)
Het assembleren van een microrobot die vroeger een pincet met een naald nodig had, een microscoop, vaste handen en minimaal acht uur. Maar nu hebben ingenieurs van de University of Toronto Engineering een methode ontwikkeld waarvoor slechts een 3D-printer en 20 minuten nodig is.
In het laboratorium van professor Eric Diller, onderzoekers creëren gemagnetiseerde microrobots - de grootte van de kop van een speld - die door met vloeistof gevulde vaten en organen in het menselijk lichaam kunnen reizen. Diller en zijn team besturen de beweging van deze microrobots draadloos met behulp van magnetische velden.
Elke microrobot wordt gebouwd door microscopisch kleine secties van magnetische naalden boven op een platte, flexibel materiaal. Eenmaal ingezet, de onderzoekers passen magnetische velden toe om microrobots te laten reizen met wormachtige bewegingen door vloeistofkanalen, of sluit zijn kleine mechanische 'kaken' om een weefselmonster te nemen.
"Deze robots zijn vrij moeilijk en arbeidsintensief om te fabriceren omdat het proces precisie vereist, " zegt afstudeerder, Tianqi Xu. "Ook vanwege de noodzaak tot handmatige montage, het is moeilijker om deze robots kleiner te maken, dat is een belangrijk doel van ons onderzoek."
Dat is de reden waarom Xu en zijn labgenoten een geautomatiseerde aanpak ontwikkelden die de ontwerp- en ontwikkelingstijd aanzienlijk verkort, en breidt de soorten microrobots uit die ze kunnen produceren. Hun bevindingen zijn vandaag gepubliceerd in Wetenschap Robotica .
Voor toekomstige medische toepassingen zijn kleinere en complexere microrobots nodig, zoals gerichte toediening van medicijnen, geassisteerde bevruchting, of biopsieën.
"Als we monsters zouden nemen in de urinewegen of in de vloeistofholten van de hersenen, stellen we ons voor dat een geoptimaliseerde techniek een belangrijke rol zou spelen bij het verkleinen van chirurgische robotinstrumenten, ' zegt Diller.
Om de mogelijkheden van hun nieuwe techniek te demonstreren, de onderzoekers bedachten meer dan 20 verschillende robotvormen, die vervolgens in een 3D-printer werden geprogrammeerd. De printer bouwt en verstevigt vervolgens het ontwerp, het oriënteren van de magnetisch gevormde deeltjes als onderdeel van het proces.
-
MASc-student Tianqi Xu houdt een microrobot omhoog die is gefabriceerd met behulp van hun geautomatiseerde systeem. Krediet:Liz Do, U of T Engineering
-
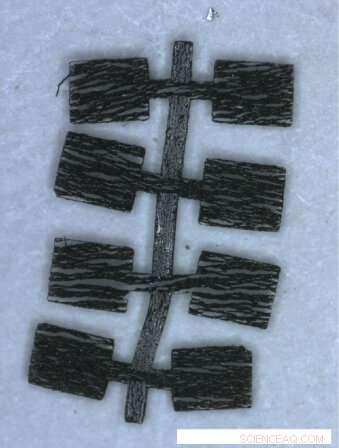
De peddel-kruipende magnetische robot. Krediet:Xu et al., Wetenschap. Robot. 4, eaav4494 (2019)
-
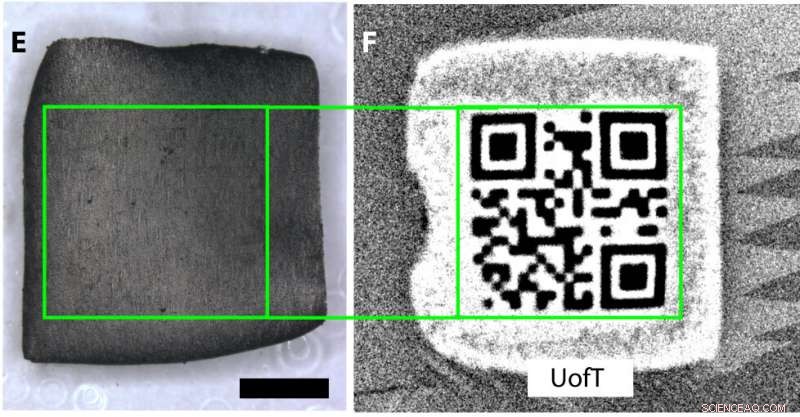
Als bewijs hiervan kan hun methode worden gebruikt om op kleine schaal zachte polymeren te magnetiseren, de onderzoekers codeerden magnetisch een QR-code met duidelijk gedefinieerde grenzen en scherpe randen in een gebied van 5 mm × 5 mm op een vel polymeer. Krediet:Xu et al., Wetenschap. Robot. 4, eaav4494 (2019)
"Eerder, we zouden één vorm voorbereiden en deze handmatig ontwerpen, besteed weken aan het plannen ervan, voordat we het konden fabriceren. En dat is nog maar één vorm, "zegt Diller. "Als we het dan bouwen, we zouden onvermijdelijk specifieke eigenaardigheden ontdekken, bijvoorbeeld misschien moeten we het aanpassen om een beetje groter of dunner te zijn om het te laten werken."
"Nu kunnen we de vormen programmeren en op print klikken, " voegt Xu toe. "We kunnen herhalen, ontwerp en verfijn het gemakkelijk. We hebben nu de kracht om nieuwe ontwerpen echt te verkennen."
De geoptimaliseerde aanpak van de onderzoekers opent de deuren voor het ontwikkelen van nog kleinere en complexere microrobots dan de huidige millimeter. "We denken dat het veelbelovend is dat we op een dag 10 keer kleiner kunnen gaan, ' zegt Diller.
Het laboratorium van Diller is van plan het geautomatiseerde proces te gebruiken om meer geavanceerde en gecompliceerde vormen van microrobots te onderzoeken. "Als onderzoeksgemeenschap op het gebied van robotica, er is een behoefte om deze ruimte van kleine medische robots te verkennen, " voegt Diller toe. "In staat zijn om ontwerpen te optimaliseren is een echt cruciaal aspect van wat het veld nodig heeft."
 Loodhalogenide perovskieten:een paard met een andere kleur
Loodhalogenide perovskieten:een paard met een andere kleur- Nieuw materiaal kan helpen de batterijkosten voor elektrische auto's te verlagen, telefoons
- Ontsteking van het synthetische transport van aminozuren in levende cellen
- Van de bronstijd tot voedselblikken, hier is hoe tin de mensheid heeft veranderd
- Zelfs machines hebben hun groenten nodig
- NASA ogen compacte orkaan Hilary
- Beijing MST Radar detectie van de lagere, middelste en bovenste atmosfeer
- Everglades restauratierapport toont succes, maar klimaatverandering blijft een uitdaging
- Sinds de deal met Parijs, klimaatcatastrofes stapelen zich op
- Gletsjerdiepte beïnvloedt planktonbloei bij Groenland
Hoofdlijnen
- Genetische modificatie en genoombewerking zijn afhankelijk van actieve rollen voor onderzoekers en de industrie
- Wat doet een bladcel?
- Wat zijn drie primaire doelen van mitose?
- Hoe zijn bacteriën en plantencellen gelijk?
- Honden zijn expressiever als iemand kijkt
- Hoe werkt een automatische DNA-sequencer?
- Fase waarin de Nucleus & Nucleolus zijn hervormd
- Wat zijn de 10 Major Body Systems?
- Uitbreiding van Braziliaans suikerriet kan de wereldwijde CO2-uitstoot verminderen
- Hooggerechtshof verwerpt beroep tegen netneutraliteit

- Boeing-crashes en Uber-botsing laten zien dat de veiligheid van passagiers afhankelijk is van zakelijke beloften, niet regelgevers testen

- Denk aan virtual reality? De buzz is vervaagd op CES 2019

- Rapport:ZTE-voorzitter belooft geen overtredingen meer, verontschuldigt zich

- Walmart experimenteert met AI om winkels in realtime te volgen


 Onderzoekers rapporteren snelste zuivering van astatine-211 die nodig is voor gerichte kankertherapie
Onderzoekers rapporteren snelste zuivering van astatine-211 die nodig is voor gerichte kankertherapie- De Indonesische Merapi-vulkaan spuwt hete wolken, 500 evacueren
- Het pleidooi voor hoop:opvoeden alsof overleven ertoe doet
- Multi-mobiel (M2) computersysteem maakt Android, iOS-apps die kunnen worden gedeeld op meerdere apparaten
- Betere katalysator voor waterstofproductie op zonne-energie
- Surfbacteriën onthullen nieuwe inzichten in de gezondheid van de oceanen
- Antarctica:terugkeer van de Weddell-polynya ondersteunt het klimaatmodel van Kiel
- Wat is een magnetisch kompas?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Norway | Swedish | Danish |

-
Wetenschap © https://nl.scienceaq.com
