Wetenschap
Een nieuw raamwerk voor op visie gebaseerd agressief rijden

AutoRally-voertuig dat tijdens het testen met hoge snelheid over een hobbel op de baan navigeert. Krediet:Drews et al.
Onderzoekers van het Institute for Robotics and Intelligent Machines (IRIM) van het Georgia Institute of Technology hebben onlangs een nieuw raamwerk voorgesteld voor agressief rijden met alleen een monoculaire camera. IMU-sensoren en wielsnelheidssensoren. Hun aanpak, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, combineert op deep learning gebaseerde wegdetectie, roetfilters en model predictive control (MPC).
"Inzicht in de randgevallen van autonoom rijden wordt erg belangrijk, "Paul Drees, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "We kozen voor agressief rijden, omdat dit een goede indicatie is voor het vermijden of beperken van botsingen die worden vereist door autonome voertuigen."
De term 'agressief rijden' verwijst naar gevallen waarin een grondvoertuig opereert in de buurt van de snelheidslimieten van het hanteren en vaak met hoge zijsliphoeken, zoals vereist in rallyracen. In hun eerdere werk de onderzoekers onderzochten agressief rijden met behulp van hoogwaardige GPS voor het schatten van wereldwijde posities. Deze aanpak heeft een aantal beperkingen, bijvoorbeeld, het vereist dure sensoren en sluit GPS-ontkende gebieden uit.
De onderzoekers boekten eerder veelbelovende resultaten met een vision-based (niet GPS-based) rijoplossing, gebaseerd op regressie van een lokale kostenkaart van monoculaire camerabeelden en het gebruik van deze informatie voor MPC-gebaseerde controle. Echter, het afzonderlijk behandelen van elk invoerframe leidde tot cruciale leeruitdagingen vanwege het beperkte gezichtsveld en het lage gezichtspunt van de camera die op een grondvoertuig is gemonteerd, waardoor het moeilijk was om kostenkaarten te genereren die op hoge snelheid effectief waren.

Systeem diagram. Krediet:Drews et al.
"Ons hoofddoel voor dit werk is om te begrijpen hoe visie kan worden gebruikt als de primaire sensor voor agressief rijden, Drews zei. "Dit levert interessante uitdagingen op omdat de visuele verwerking aan strenge tijdseisen moet voldoen. Dit stelt ons in staat om algoritmen te onderzoeken die nauw verbonden zijn tussen perceptie en controle."
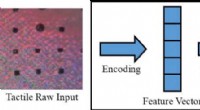
In deze nieuwe studie de onderzoekers gingen in op de beperkingen van hun eerdere werk, het introduceren van een alternatieve benadering voor autonoom rijden op hoge snelheid waarbij een lokale kostenkaartgenerator in de vorm van een op video gebaseerd diep neuraal netwerkmodel (d.w.z. LSTM) wordt gebruikt als het meetproces voor een deeltjesfilterstatusschatter.
Eigenlijk, het roetfilter gebruikt dit dynamische observatiemodel om te lokaliseren in een schematische kaart en MPC wordt gebruikt om agressief te rijden op basis van deze staatsschatting. Dit aspect van het raamwerk stelde hen in staat om een globale positieschatting te verkrijgen tegen een schematische kaart zonder gebruik te maken van GPS-technologie, terwijl ook de nauwkeurigheid van de voorspellingen van de kostenkaart wordt verbeterd.
"We benaderen autonoom racen direct door de intermediaire kostenkaart rechtstreeks te leren van monoculaire beelden, Drews legde uit. "Deze intermediaire representatie kan dan direct worden gebruikt door model voorspellende controle, of kan worden gebruikt door een deeltjesfilter om op GPS-status gebaseerde agressieve prestaties te benaderen."
Drews en zijn collega's evalueerden hun raamwerk met behulp van het 1:5-testvoertuig op AutoRally, een open source platform van agressief autonoom rijden. Met hun aanpak ze ontdekten dat het voertuig betrouwbaar kon werken bij de wrijvingslimieten op een complexe onverharde weg, het bereiken van snelheden boven 27 mph (12 m/s).
"Ik denk dat we in deze studie twee dingen hebben laten zien, ' zei Drews. 'Eerst, dat door een kostenkaart rechtstreeks uit afbeeldingen te regresseren, we kunnen het zowel direct gebruiken als voor lokalisatie om agressief rijden op de grens van het rijgedrag mogelijk te maken. Tweede, die temporele informatie is erg belangrijk in een moeilijk rijscenario als dit."
De studie uitgevoerd door Drew en zijn collega's toont de voordelen aan van het combineren van MPC met staatsschatting en aangeleerde perceptie. In de toekomst, hun raamwerk zou de weg kunnen effenen voor robuuster en kosteneffectiever agressief autonoom rijden op complexe circuits.
"We willen deze methode nu met geleerde aandacht verder verbeteren en uitbreiden naar obstakels en onbekende omgevingen, ' zei Drew.
© 2018 Wetenschap X Netwerk
 Onderzoekers beschrijven structuren, mechanismen die bacteriën in staat stellen antibiotica te weerstaan
Onderzoekers beschrijven structuren, mechanismen die bacteriën in staat stellen antibiotica te weerstaan- Chemici programmeren vloeibaar-kristallijne elastomeren om complexe draaibewegingen eenvoudig na te bootsen met behulp van licht
- Snelle oppervlaktedynamiek maakte koude verbinding van metalen glazen mogelijk
- Precies afstemmen op de dynamiek van upconversion-luminescentie
- Olie en water kunnen onder extreme druk vermengen
- De instorting van de Braziliaanse dam had kunnen worden voorspeld met de juiste monitoringtechnologie. studie vondsten
- Vroegtijdig waarschuwingssysteem voor aardbevingen betekent vals alarm, maar het is het nog steeds waard, onderzoekers zeggen:
- Negatieve effecten van regenachtig weer
- Noord-Amerika zorgt voor een wereldwijde explosie van olie- en gaspijpleidingen
- Nieuw ontdekte fytoplanktongroepen lijken de voorkeur te geven aan warmere oceanen
Hoofdlijnen
- Inzoomen op eiwit om nierstenen te voorkomen
- Statistische modellering helpt visserijbeheerders invasieve soorten te verwijderen
- Wat is een fossiel?
- Mariene wetenschappers leiden een uitgebreide beoordeling van soorten reuzenschelpdieren wereldwijd
- Wat zijn de twee processen die ATP produceren?
- Bloem trekt insecten aan door zich voor te doen als paddenstoel
- Research Paper Topics in Biochemistry
- Wetenschappers dringen aan op bedreigde lijst van cheeta's
- De circadiane klok bepaalt het tempo van de plantengroei
- Britse Oscar-winnende special effects-firma overweegt beursgang in Londen

- Genereren van cross-modale sensorische data voor robotische visueel-tactiele perceptie
- Japanse bedrijven worden aangeklaagd wegens vermeende manipulatie van maglev-biedingen

- Nieuwe planningstool biedt zowel betere vluchtkeuzes als hogere winsten van luchtvaartmaatschappijen
- YouTube:geen deepfakes of geboortevideo's bij de verkiezingen van 2020


 Lux converteren naar Candela
Lux converteren naar Candela- Klimaat en water in een veranderend Afrika
- 's Werelds meest gevoelige plasmonresonantiesensor geïnspireerd op de oude Romeinse beker
- Niet-destructieve positronenstralen sondeschade, ondersteuning van vooruitgang op het gebied van veiligheid in stralingsomgevingen
- Zelfgemaakte elektrische transformatoren
- Wetenschapsproject: de effecten van temperatuur op vloeistoffen
- Onderzoekers zeggen dat de leeftijd van de ringen van Saturnus moeilijk te bepalen is
- Eén coole camera - LSST's cryostaatassemblage voltooid
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
