Wetenschap
Elektronische handschoen geeft robots tastzin
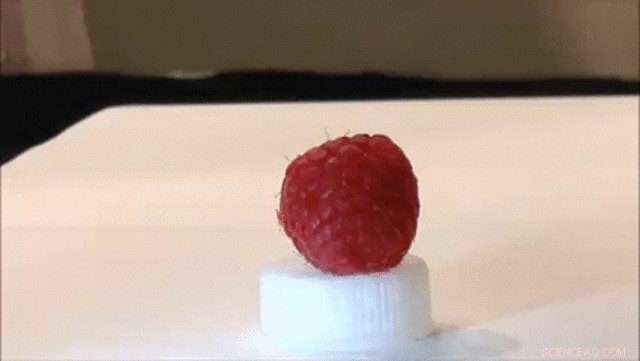
Stanford-onderzoekers ontwikkelden de huidachtige sensor op de vingertop van deze robothand, en programmeerde het om het fruit zonder schade aan te raken. Op een dag hopen ze controlesystemen te creëren waarmee een robot de kenmerken van objecten kan waarnemen en autonoom kan berekenen hoeveel kracht moet worden uitgeoefend. Krediet:het Bao Lab
Stanford-ingenieurs hebben een elektronische handschoen ontwikkeld die sensoren bevat die robothanden op een dag het soort behendigheid kunnen geven dat mensen als vanzelfsprekend beschouwen.
In een paper gepubliceerd op 21 november in Wetenschap Robotica , chemisch ingenieur Zhenan Bao en haar team hebben aangetoond dat de sensoren goed genoeg werken om een robothand in staat te stellen een delicate bes aan te raken en een pingpongbal te hanteren zonder ze te pletten.
"Deze technologie zet ons op het pad om robots ooit het soort detectievermogen te geven dat in de menselijke huid wordt gevonden, ' zei Bao.
Bao zei dat de sensoren in de vingertoppen van de handschoen tegelijkertijd de intensiteit en richting van de druk meten, twee eigenschappen die essentieel zijn voor het bereiken van handvaardigheid. De onderzoekers moeten de technologie om deze sensoren automatisch aan te sturen nog perfectioneren, maar als ze dat doen, een robot die de handschoen draagt, zou de behendigheid kunnen hebben om een ei tussen duim en wijsvinger vast te houden zonder het te breken of te laten glippen.
Elektronica die het leven imiteert
De elektronische handschoen imiteert de manier waarop lagen van de menselijke huid samenwerken om onze handen hun buitengewone gevoeligheid te geven.
Onze buitenste huidlaag is doordrenkt met sensoren om druk te detecteren, warmte en andere prikkels. Onze vingers en handpalmen zijn bijzonder rijk aan aanraaksensoren. Deze sensoren werken samen met een onderlaag van de huid, het spinosum genaamd, een hobbelig microscopisch terrein van heuvels en valleien.
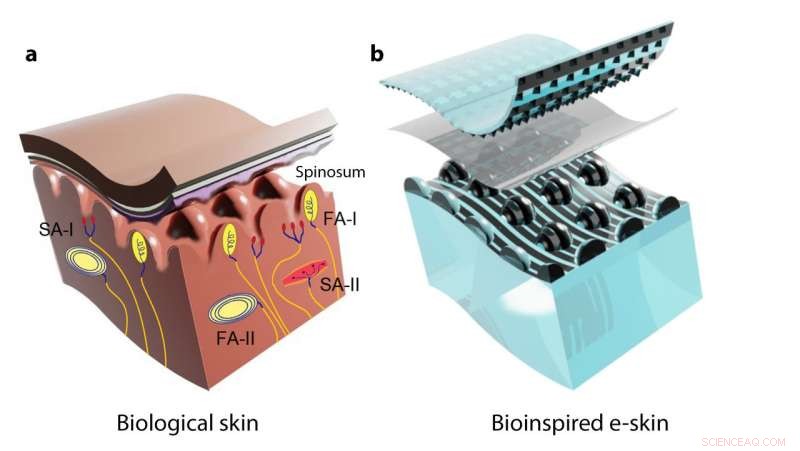
Een dwarsdoorsnede van de menselijke huid vanaf de vingertop met de belangrijkste sensorische structuren (links). Deze structuur diende als inspiratie voor het ontwerp van de e-skin (rechts). Krediet:Boutry et al., Wetenschap. Robot . 3, eaau6914 (2018)
Die hobbeligheid is cruciaal. Als onze vinger een voorwerp aanraakt, de buitenste huidlaag komt dichter bij het spinosum. Een lichte aanraking wordt vooral gevoeld door sensoren dicht bij de heuveltoppen. Meer intense druk dwingt de buitenste huid naar beneden in de valleien van het spinosum, waardoor er meer intense aanrakingssensaties ontstaan.
Maar het meten van de intensiteit van druk is slechts een deel van wat het spinosum mogelijk maakt. Deze hobbelige onderlaag helpt ook om de richting van de druk te onthullen, of dwarskracht. Een vinger die op het noorden drukt, bijvoorbeeld, creëert sterke signalen op de zuidelijke hellingen van die microscopisch kleine heuvels. Dit vermogen om schuifkracht te voelen maakt deel uit van wat ons helpt een ei voorzichtig maar stevig tussen duim en wijsvinger vast te houden.
Postdoctoraal onderzoeker Clementine Boutry en masterstudent Marc Negre leidden de ontwikkeling van de elektronische sensoren die dit menselijke mechanisme nabootsen. Elke sensor op de vingertop van de robothandschoen is gemaakt van drie flexibele lagen die samenwerken. De bovenste en onderste lagen zijn elektrisch actief. De onderzoekers legden een raster van elektrische lijnen op elk van de twee tegenover elkaar liggende oppervlakken, als rijen in een veld, en deze rijen loodrecht op elkaar gedraaid om een dichte reeks kleine sensorpixels te creëren. Ze maakten ook de onderste laag hobbelig zoals het spinosum.
De rubberen isolator in het midden hield eenvoudig de bovenste en onderste lagen elektroden uit elkaar. Maar die scheiding was cruciaal, omdat elektroden die dichtbij zijn zonder elkaar aan te raken, elektrische energie kunnen opslaan. Terwijl de robotvinger naar beneden drukte, door de bovenste elektroden dichter bij de bodem te drukken, de opgeslagen energie nam toe. De heuvels en valleien van de onderste laag boden een manier om de intensiteit en richting van druk in kaart te brengen op specifieke punten op de loodrechte roosters, net als de menselijke huid.
Delicate aanraking
Om hun technologie te testen, plaatsten de onderzoekers hun drielaagse sensoren op de vingers van een rubberen handschoen, en doe de handschoen op een robothand. Uiteindelijk is het doel om sensoren rechtstreeks in te bedden in een huidachtige bedekking voor robothanden. In een experiment, ze programmeerden de handschoendragende robothand om zachtjes een bes aan te raken zonder deze te beschadigen. Ze programmeerden ook de gehandschoende hand om een pingpongbal op te tillen en te verplaatsen zonder hem te verpletteren, door de sensor te gebruiken om de juiste schuifkracht te detecteren om de bal vast te pakken zonder hem te laten vallen.
Bao zei dat met de juiste programmering een robothand die de huidige aanraakgevoelige handschoen draagt, een repetitieve taak kan uitvoeren, zoals eieren van een transportband tillen en in dozen plaatsen. De technologie kan ook worden toegepast in robotgeassisteerde chirurgie, waar nauwkeurige aanraakbediening essentieel is. Maar het uiteindelijke doel van Bao is om een geavanceerde versie van de handschoen te ontwikkelen die automatisch precies de juiste hoeveelheid kracht uitoefent om een object veilig te hanteren zonder voorafgaande programmering.
"We kunnen een robothand programmeren om een framboos aan te raken zonder hem te verpletteren, maar we zijn nog lang niet in staat om aan te raken en te detecteren dat het framboos is en de robot in staat te stellen het op te rapen, " ze zei.
 Wat zijn de twee belangrijkste componenten van een atoom?
Wat zijn de twee belangrijkste componenten van een atoom? - Paradigmaverschuivende theorie benadrukt het belang van substraatflexibiliteit in enzymatische reacties
- Onderzoekers ontwikkelen gasdetectiesysteem op hoog niveau
- Tweedelijnswetenschapslessen met zout
- Hoe beïnvloedt de concentratie van een oplossing osmose?
Hoofdlijnen
- Soorten Agar-platen
- Malariaparasiet verpakt genetisch materiaal voor reis van muggen naar mensen
- Wat is het Missyplicity-project?
- Wetenschappers ontdekken dat genen worden aangestuurd door nanovoetballen
- Zeester maakt comeback nadat syndroom miljoenen heeft gedood
- Hoe Cytoplasma voor een celproject te maken
- Wat zijn de effecten van isolatie in de geest?
- Een nieuwe regulator van de handel in blaasjes in planten
- 10 toepassingen voor zuurstof
- Bij online aankopen, klanten geven de voorkeur aan livechat boven bellen

- Watchdog:FBI had harder kunnen proberen om iPhone te hacken

- New Mexico klaagt Google aan voor het verzamelen van gegevens van kinderen

- Beste van vorig jaar:de beste TechXplore-artikelen van 2019

- Nieuwe kunstmatige-intelligentietechniek verbetert de kwaliteit van medische beeldvorming drastisch

 Krachtige aardbeving schokt Indonesië, veel gebouwen storten in
Krachtige aardbeving schokt Indonesië, veel gebouwen storten in- Schepen op verzoek lekkage kunnen helpen bij het toedienen van medicijnen
- Wanneer wordt een mutatie in een DNA-molecuul doorgegeven aan nakomelingen?
- Economische groei stimuleren en klimaatverandering aanpakken gaan hand in hand
- Hoe is Earth Day geëvolueerd?
- Experiment voor het plaatsen van een ei in azijn
- Een vluchtig bezoek - een asteroïde van een ander planetenstelsel is zojuist langs de aarde geschoten
- Studie ontrafelt hoe microben een belangrijke stof produceren die wordt gebruikt om kanker te bestrijden
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Danish | Norway | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
