Wetenschap
Stedelijke zwermen voor autonoom afvalbeheer
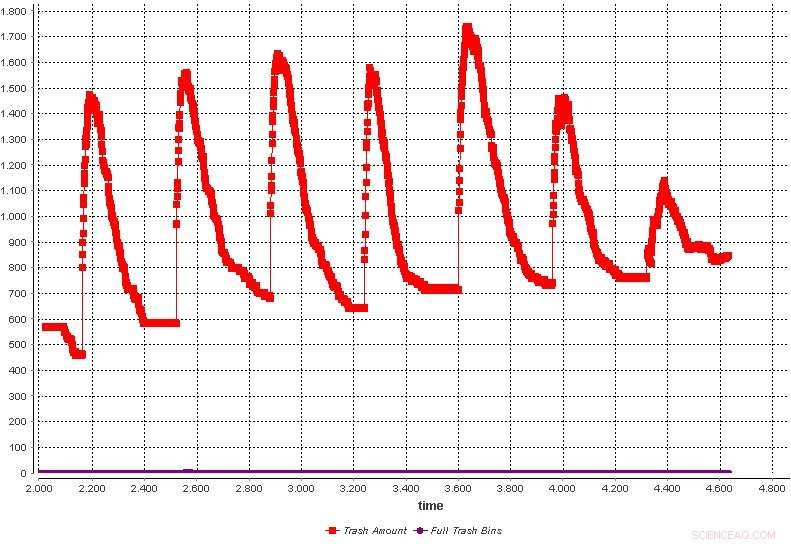
Afbeelding die laat zien hoe snel het storten van nieuw afval in de stedelijke omgeving wordt afgevoerd. Krediet:Alfeo et al.
Onderzoekers van het MIT Media Lab, de Universiteit van Pisa, en Université Libre de Bruxelles hebben onlangs de haalbaarheid onderzocht van het gebruik van zwermrobotsystemen voor autonoom afvalbeheer. Hun aanpak, geschetst in een paper dat vooraf is gepubliceerd op arXiv, past bio-geïnspireerde foerageermethoden toe op zwermrobotica, met als doel de efficiëntie en autonomie van het afvalbeheer in steden te verbeteren.
"Met autonome voertuigen, zwermen drones voor leveringen en teams van robots die magazijnen organiseren, de stad van de toekomst wordt een cybernetisch ecosysteem bestaande uit machines en mensen, "Antonio Luca Alfeo, vertelde een van de onderzoekers die het onderzoek uitvoerden aan Tech Xplore. "Dit is een fascinerend scenario, evenals een enorme technologische uitdaging. Het beheer van dergelijke systemen resulteert in een complexiteit die exponentieel toeneemt naarmate er meer machines worden ingezet, vooral als we willen dat ze daadwerkelijk 'bij ons wonen' en autonoom reageren op de veranderende behoeften van hun omgeving."
De natuur biedt verschillende voorbeelden van hoe vergelijkbare coëxistentieproblemen briljant en effectief kunnen worden opgelost. In hun studie hebben de onderzoekers probeerden deze op de natuur geïnspireerde oplossingen toe te passen op het beheer van robotzwermen.
"We stellen een afvalverwerkingssysteem voor met zwermen robots waarvan de zelforganisatie is gebaseerd op het gedrag van sociale insecten, ook bekend als op stigmergy gebaseerd foerageren, " legde Alfeo uit. "Het voorgestelde systeem heeft betrekking op de verwijdering van afval, van prullenbakken tot enkele centrale depots."
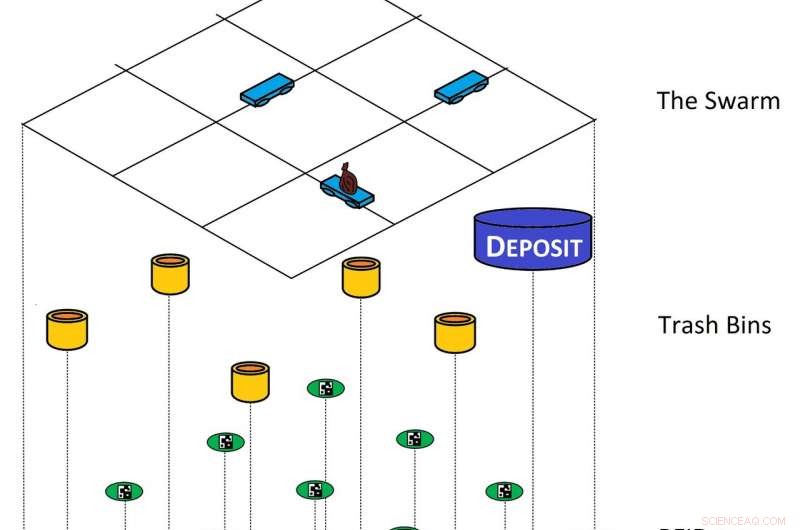
"Virtuele feromonen" die door andere robots worden vrijgegeven op RFID-tags in de stedelijke omgeving. Krediet:Alfeo et al.
De door Alfeo en zijn collega's ontwikkelde robots worden niet bestuurd en aangestuurd door een service op afstand. In plaats daarvan, al hun beslissingen worden genomen in een opwelling, op basis van hun waarnemingen en realtime waarnemingen.
"Onder deze percepties, er zijn ook 'virtuele feromonen' die door andere robots worden vrijgegeven op RFID-tags in de stedelijke omgeving, "Zei Alfeo. "Deze markeren het meest geschikte pad van een of meer niet-lege vuilnisbakken en de dichtstbijzijnde storting. Het belangrijkste is, dankzij zijn collectieve gedrag, de zwerm kan autonoom zichzelf organiseren om zich te richten op de gebieden met de grootste hoeveelheid afval, altijd een effectief antwoord bieden."
Het ontwerp van deze innovatieve oplossing vereiste een grote verscheidenheid aan vaardigheden en omvatte verschillende expertisegebieden. Het team dat het heeft ontwikkeld is daarom zeer interdisciplinair, met een achtergrond in stadswetenschappen, bio-geïnspireerde robotica, en datawetenschap.
"Teamleden gespecialiseerd in stadswetenschap leverden het model van de robot die in het onderzoek werd gebruikt en behandelden de modellering van stedelijke ruimte in GAMA, een multi-agent simulatieplatform, "Zei Alfeo. "Degenen die bedreven zijn in het gedragsontwerp van een zwerm robots, realiseerden en testten de logica van de zwerm in een goed vergroot model van de stedelijke omgeving. Eindelijk, de analyse van de implicaties van elke ontwerpkeuze werd begeleid door zeer bekwame datawetenschappers."
Alfeo en zijn collega's evalueerden hun zwermsysteem voor afvalbeheer en ontdekten dat het beter presteerde dan bestaande benaderingen. Hun onderzoek bood ook waardevol inzicht in hoe zwermrobotsystemen het beste kunnen worden ontworpen en aangepast.
"We hebben laten zien dat een zwerm zelforganiserende robots kan leiden tot grote verbeteringen op het gebied van afvalbeheer, zonder enige externe informatiebron of voorkennis over de vraag naar afvalverwijdering, "Zei Alfeo. "Bovendien, we hebben inzicht gegeven in het ontwerp van een dergelijk systeem met als doel de twee belangrijkste eigenschappen ervan in evenwicht te brengen, dat is, het verkennend vermogen en het reactievermogen van de zwerm. De eerste kan het optreden van volle vuilnisbakken verminderen, terwijl dit laatste helpt om de hoeveelheid afval in de stedelijke omgeving te verminderen."
Het onderzoek van Alfeo en zijn collega's is een fascinerend en nuttig voorbeeld van hoe zwermrobotsystemen kunnen worden toegepast in stedelijke omgevingen. Hun resultaten zijn veelbelovend, nieuwe interessante mogelijkheden openen die in de toekomst verder kunnen worden verkend.
"De voorgestelde aanpak is niet specifiek voor afvalbeheer en kan worden getest in een aantal verschillende toepassingen, zoals autonome voertuigen, "Zei Alfeo. "Omdat in dit geval veiligheid een kritische factor is, echter, het ontwerp van een dergelijk systeem moet verdere specifieke oplossingen omvatten, zoals blockchaintechnologie."
© 2018 Wetenschap X Netwerk
 Akoestische beeldvorming onthult verborgen kenmerken van megathrust-fout voor Costa Rica
Akoestische beeldvorming onthult verborgen kenmerken van megathrust-fout voor Costa Rica- NASA vindt dat de regenval afneemt in een verzwakkende tropische storm Eugene
- Nieuwe aanwijzingen voor kusterosie
- Wat is het verschil tussen wespen en horzels?
- Hectische strijd om de kust te beschermen terwijl de verslechterende olieramp in Orange County de stranden besluipt
Hoofdlijnen
- Amazoneboeren ontdekten het geheim van het domesticeren van wilde rijst 4, 000 jaar geleden
- Vissen hebben complexe persoonlijkheden, uit onderzoek blijkt
- Waarom kan je jezelf niet kietelen?
- Stadia van de Menselijke Reproductie
- Hoe een omgedraaid gen vlinders hielp mimicry te ontwikkelen
- Nieuwe tools helpen bij het zoeken naar levensverlengende chemicaliën
- Making Better Humans - Het huwelijk van mens en machine
- Lichtgroene planten besparen stikstof zonder in te boeten aan fotosynthetische efficiëntie
- Voor bonobo's, het loont om machtige bondgenoten te hebben
- Nieuwe brug in Californië krijgt sensoren om gegevens over aardbevingen te verzamelen

- Storingen of niet, Nissan begint semi-autonome ritten te testen

- Batterij van een miljoen mijl onthuld door baanbrekend onderzoek

- IBM heeft het over 's werelds kleinste computer kleiner dan een korreltje zout
- Facebook geeft bug privacy-instellingen toe die 14 miljoen gebruikers treft


 Met geluid in de aarde kijken
Met geluid in de aarde kijken- Hoe X-Intercept en Y-Intercept
- NASA vindt ex-tropische cycloon Esther terug landinwaarts
- Een korte geschiedenis van zwarte gaten
- NASA-wiskundige Katherine Johnson wordt geëerd in brons
- Hoe laat je een waarschuwing achter die net zo lang duurt als kernafval?
- Verschillen tussen "Fysiek" en "Fysiologisch"
- Vulkaanuitbarstingen veroorzaakten het begin van de dinosauriërs
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
