Wetenschap
SLAP:gelijktijdige lokalisatie en planning voor autonome robots
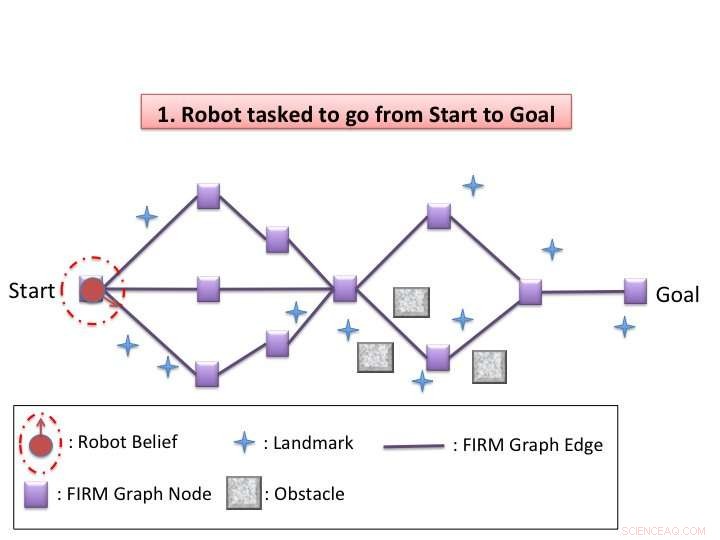
Algoritme illustratie. Krediet:Agha-mohammadi et al.
Onderzoekers van het NASA Jet Propulsion Laboratory (JPL), Texas A&M-universiteit, en Carnegie Mellon University hebben onlangs een onderzoeksproject uitgevoerd om gelijktijdige lokalisatie en planning (SLAP)-mogelijkheden in autonome robots mogelijk te maken. hun papier, gepubliceerd in IEEE-transacties op robotica , presenteert een dynamisch herplanningsschema in de geloofsruimte, die met name nuttig kunnen zijn voor robots die onder onzekerheid werken, zoals in veranderende omgevingen.
"Robots die in de echte wereld opereren, moeten omgaan met onzekerheid, "Gezongen Kyun Kim, vertelde een van de onderzoekers die het onderzoek uitvoerden aan TechXplore. "Bijvoorbeeld, een Marsrover moet navigeren naar wetenschappelijke doellocaties, maar het moet ook botsingen met obstakels vermijden. Dus, zowel nauwkeurige lokalisatie als kostenefficiënte padplanning zijn essentiële mogelijkheden."
SLAP is een sleutelvaardigheid voor autonome robots die opereren onder onzekerheid, waardoor ze effectief door ruimtes kunnen navigeren, obstakels vermijden, en plannen hun weg naar doellocaties. Het sequentiële besluitvormingsproces van een robot onder onzekerheid kan worden geformuleerd als een POMDP (gedeeltelijk waarneembaar Markov-beslissingsproces), die continu online moet worden opgelost. Echter, ervoor zorgen dat robots POMDP's effectief en nauwkeurig oplossen, kan een behoorlijke uitdaging zijn.
"We kwamen met twee hoofdideeën om SLAP-problemen op te lossen, " legde Kim uit. "Een daarvan is om feedbackcontrollers te gebruiken om een geloofstoestand bereikbaar te maken. Dit kan de 'vloek van de geschiedenis' effectief breken, ' die ons helpt om grotere problemen op te lossen. De andere is om de beslissing tijdens runtime dynamisch opnieuw te plannen en te verbeteren, verbetering van de kwaliteit en robuustheid van de oplossing. Dynamische herplanning is vooral nuttig wanneer er systeemmodelleringsfouten zijn, dynamische omgeving verandert, of intermitterende sensor-/actuatorstoringen."

Marsrover bijvoorbeeld. Krediet:NASA/JPL-Caltech.
Kim en zijn collega's bedachten een dynamisch herplanningsschema in de geloofsruimte waarmee robots effectief door de ruimte om hen heen kunnen navigeren in situaties van onzekerheid, zoals in veranderende omgevingen of bij onverwachte obstakels. Hun algoritme heeft twee fasen, offline en online.
"In de offline fase ons algoritme construeert een dunne grafiek in de geloofsruimte met een feedbackcontroller voor elk knooppunt en lost vervolgens het grove globale beleid op (beslissen welke actie moet worden ondernomen bij de huidige geloofstoestand) in de grafiek, " zei Kim. "In de online fase, dynamische herplanning wordt uitgevoerd elke keer dat de geloofsstatus wordt bijgewerkt. Het algoritme evalueert lokaal elke actie van het verplaatsen naar een nabijgelegen knooppunt in de grafiek en selecteert degene met de minimale kosten. Na het uitvoeren van de geselecteerde actie en het bijwerken van de huidige overtuiging, het herhaalt het herplanningsproces."
Het schema dat door Kim en zijn collega's is bedacht, maakt gebruik van het gedrag van feedbackcontrollers in de geloofsruimte. Met andere woorden, feedbackcontrollers fungeren als een trechter in de geloofsruimte, met een nabijgelegen geloofstoestand die mogelijk convergeert met de geloofstoestand van het controledoel. Dit pakt effectief een belangrijk probleem aan bij het oplossen van POMPD's:exponentiële complexiteit in de planningshorizon.
In feite, zodra de huidige overtuiging van het algoritme samenkomt met een bekende overtuiging, het is niet nodig om acties en observaties te overwegen die leiden tot de huidige overtuiging. Dit leidt uiteindelijk tot een betere schaalbaarheid, waardoor robots complexere navigatieproblemen kunnen oplossen.
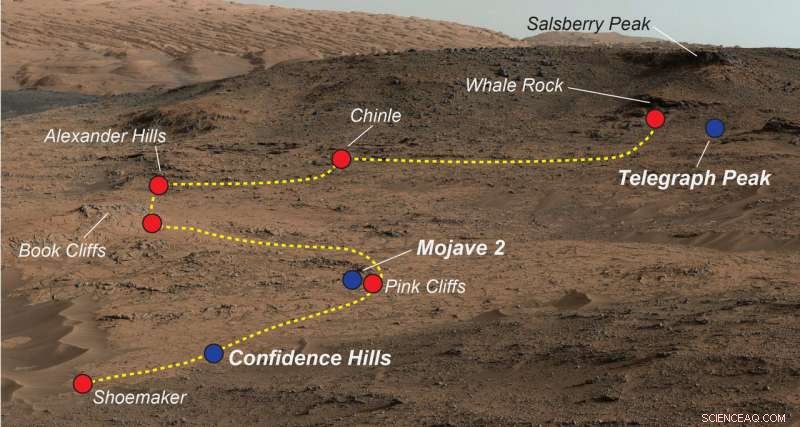
Marsrover bijvoorbeeld. Krediet:NASA/JPL-Caltech/MSSS.
"Tijdens dynamische herplanning, de voorgestelde methode bootst de lokale optimalisatie aan met het (grove) globale beleid, "Zei Kim. "Dit betekent dat het een niet-bijziende beslissing kan nemen, in tegenstelling tot andere online planners met een eindige terugwijkende horizon. Kortom, deze methode kan zich aanpassen aan dynamische veranderingen in de omgeving en robuust werken ondanks een ongemodelleerde verstoring of fouten, terwijl het maken van kostenefficiënte plannen in de wereldwijde zin."
Door onnodige stabilisatiestappen te elimineren, de door Kim en zijn collega's bedachte methode presteerde beter dan feedback-based information roadmap (FIRM), een state-of-the-art techniek voor het oplossen van POMDP's. In de toekomst, dit dynamische herplanningsschema in de geloofsruimte kan betere SLAP-mogelijkheden mogelijk maken in robots die onder verschillende mate van onzekerheid werken.
"We zijn nu van plan onze methode toe te passen op echte problemen, Kim zei. "Een mogelijke toepassing is een prototype Mars-helikopter-rover-navigatie en -coördinatie voor planetaire verkenning, een project geleid door Dr. Ali-akbar Agha-mohammadi bij JPL. Een over het terrein vliegende helikopter zou een grove kaart kunnen opleveren, zodat in de offline fase een grof globaal beleid kan worden verkregen. Vervolgens, een rover zou dynamisch herplannen in de online fase, om veilige en kostenefficiënte navigatiemissies te volbrengen."
© 2018 Tech Xplore
 Een manier om tandglazuur te herstellen
Een manier om tandglazuur te herstellen- Industrieel afval wordt hergebruikt om alternatieven voor plastic te produceren
- Gevoelige nieuwe test detecteert antilichamen tegen SARS-CoV-2 in slechts 10 minuten
- Technische defecten in kristallijn materiaal verhogen de elektrische prestaties
- Test bepaalt personen die waarschijnlijk DNA afstaan op plaats delict
Hoofdlijnen
- De oudste kleur van de aarde was roze
- Waarom heeft een regenworm een gesloten bloedsomloop?
- Vitamine E-ontdekking in maïs kan leiden tot meer voedzame gewassen
- Heb je testangst? Hier is hoe we het moeten aanpakken
- Enzymactiviteit in appels
- Het ontrafelen van de mechanismen die de celgroei en -grootte regelen
- Onderzoekers ontdekken hoe cellen decennia later infecties onthouden
- Jonge vleermuizen leren vleermuisdialecten van hun nestgenoten
- Zijn getrouwde mensen gelukkiger dan alleenstaanden?
- Hoofddraaiende Cassie Cal maakt campusbewegingen op hovershoes

- Hallo, Alexa:Sorry dat ik je voor de gek hield

- Amazon laat plan voor hoofdkwartier in New York vallen te midden van protesten

- Britse autoverkopen herstellen na jarenlange dalingen:industrie

- Supercomputer analyseert webverkeer over het hele internet


 Onderzoek kan ongewenste bijwerkingen bij nieuwe medicijnen minimaliseren
Onderzoek kan ongewenste bijwerkingen bij nieuwe medicijnen minimaliseren- Een schoolproject maken Battlefield Display
- Webuitvinder spoort gebruikers aan om volledige controle over gegevens te zoeken
- Ontdekking van door licht geïnduceerde ferro-elektriciteit in strontiumtitanaat
- Beste van vorig jaar:de beste Phys.org-artikelen van 2020
- Het mysterie van de materie opsporen
- Kwantumverstrengeling gedemonstreerd aan boord van CubeSat
- Soorten luchtverontreiniging: smog en zure regen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
