Wetenschap
Een nieuw ontwikkelingskader zou robots in staat kunnen stellen om autonoom hyperparameters te optimaliseren
Krediet:Petit et al.
Onderzoekers van de Ecole Centrale de Lyon hebben onlangs een nieuw ontwikkelingskader ontwikkeld, geïnspireerd op het langetermijngeheugen en de redeneermechanismen van mensen. Dit kader, beschreven in een paper gepresenteerd op IEEE ICDL-Epirob in Tokyo en vooraf gepubliceerd op arXiv, stelt robots in staat om autonoom hyperparameters te optimaliseren die zijn afgestemd op elke actie- en/of visiemodule, die worden behandeld als een zwarte doos.
In recente jaren, onderzoekers hebben robots gebouwd die verschillende taken kunnen uitvoeren. Niettemin, de omgeving waarin deze robots opereren is vaak wat beperkt. Dit komt omdat in robotica, de meeste algoritmen worden handmatig gemaakt en geoptimaliseerd door menselijke experts om te anticiperen op de potentiële uitdagingen die de robot in een bepaalde situatie kan tegenkomen.
"Echter, bij het omgaan met onzekerheden, bijvoorbeeld, wanneer de robot tijdens zijn leven vaak met nieuwe objecten te maken krijgt, altijd vertrouwen op aanvullende programma's en optimalisatie van menselijke ingenieurs is niet levensvatbaar:de robot moet het zelf leren, "Dr. Maxime Petit, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "We willen robots leermechanismen bieden zodat ze autonoom kunnen zijn en zich kunnen aanpassen aan verschillende situaties, zelfs als deze niet worden verwacht."
Het ontwikkelen van robots die zich automatisch aanpassen aan verschillende situaties kan een aantal nuttige toepassingen hebben, bijvoorbeeld, in de context van industriële robotica, waar robotarmen onbekende objecten uit homogene bulks moeten oppakken.
Krediet:Petit et al.
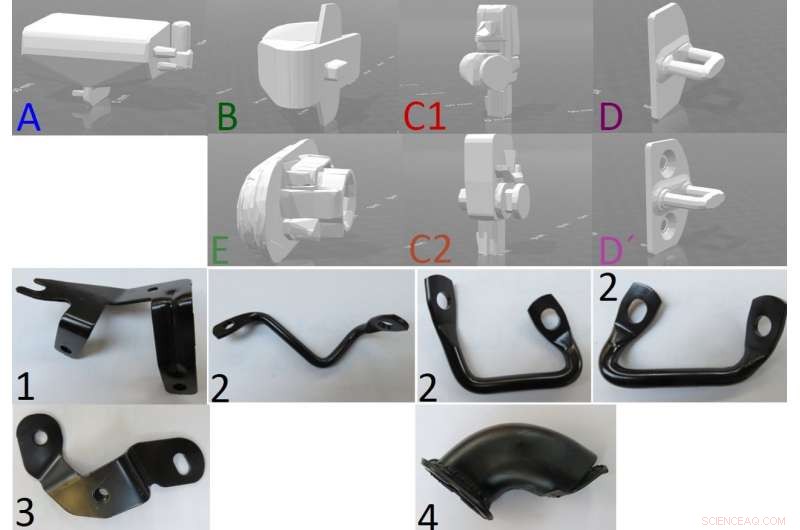
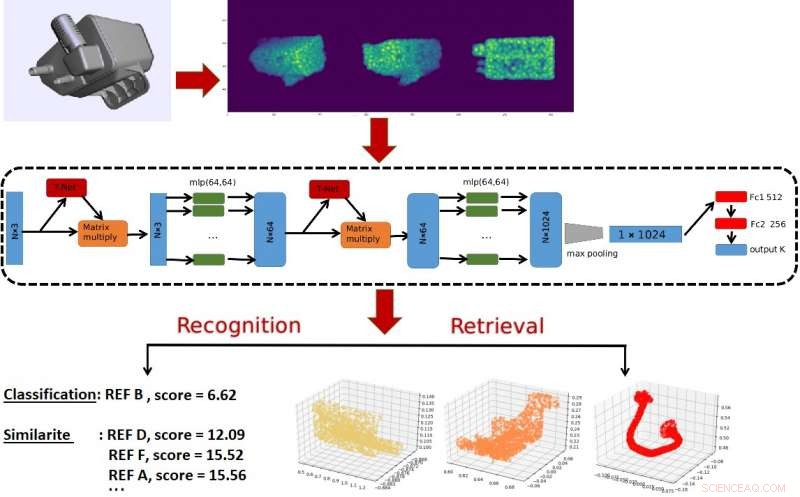
"We wilden dat de robot de parameters van vision-based grijpsoftware (Kamido by Siléane) autonoom zou optimaliseren voor elk object in minder dan een paar uur, Petit legde uit. "Om dit te doen, we gebruikten een ontwikkelingskader dat tot doel heeft na te bootsen hoe kinderen over de wereld leren. Vooral, we willen profiteren van de gelijkenis tussen objecten om het leerproces te versnellen door kennis van de ene taak over te dragen naar een andere vergelijkbare taak."
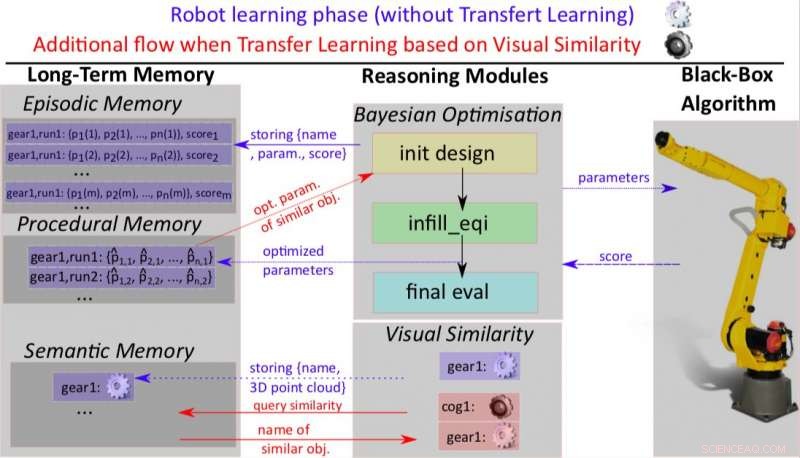
Het ontwikkelingskader dat door Petit en zijn collega's wordt gepresenteerd, is gericht op het levenslang en open leren van nieuwe vaardigheden in robots mogelijk maken via een proces dat vergelijkbaar is met dat bij menselijke kinderen. Om dit te bereiken, hun raamwerk omvat een langetermijngeheugen waarin robots hun ervaringen opslaan, evenals redeneervermogen waarmee ze nuttige elementen in hun opgeslagen gegevens kunnen identificeren.
"De Bayesiaanse optimalisatiemethode werkt als een slimme 'trial and error'-strategie:de robot schat welke set parameters het beste kan worden geëvalueerd op basis van de resultaten van de vorige evaluatie, " legde Petit uit. "Kortom, deze methode begeleidt de robot efficiënt bij het verkennen van parameters rond waarden die niet zijn geprobeerd, maar ook in de richting van waarden met een hoog potentieel."
Ondanks de efficiëntie van deze techniek, de onderzoekers wilden de convergentie van het leren van de robot vergroten om een betere optimalisatie te bereiken. Traditionele Bayesiaanse optimalisatiemethoden waren daarom niet wenselijk, zoals bij deze, het leren van de robot begint bij elk nieuw object dat hij tegenkomt. Om deze beperking aan te pakken, de onderzoekers gebruikten een strategie op basis van visieovereenkomst.
Krediet:Petit et al.
"We wilden profiteren van de eerdere ervaring van de robot voor verschillende, maar vergelijkbare taken, " zei Petit. "Dus, wanneer ze worden geconfronteerd met een nieuw object, we dwingen de robot om in eerste instantie oplossingen te verkennen die zijn geoptimaliseerd voor vergelijkbare objecten. Bijvoorbeeld, als de robot weet hoe hij een sinaasappel moet pakken en nu een appel moet pakken, we dwingen de robot om de appel vast te pakken met behulp van de 'sinaasappel grijpen'-strategie. We doen dit door de visuele gelijkenismodule te vragen welke objecten vergelijkbaar zijn met de nieuwe, en de beste oplossingen voor deze vergelijkbare objecten uit het langetermijngeheugen halen."
De onderzoekers evalueerden hun raamwerk binnen een simulatieomgeving. Ze vonden de transferleerstrategie op basis van visuele gelijkenis veel gunstiger dan amnesisch leren, waarin robots elke keer dat ze een nieuwe taak uitvoeren, vanaf het begin strategieën leren.
Tot dusver, ontwikkelingskaders zijn voornamelijk onderzocht in de context van sociale robotica, bijvoorbeeld, helpen om de assistentie van sociale robots af te stemmen op de behoeften of voorkeuren van hun gebruikers.
"Het gebruik van dit raamwerk in een industriële robotica-opstelling leidde tot overtuigende resultaten, wat impliceert dat de velden van sociale en industriële robotica veel van elkaar te leren hebben, Petit zei. "Een ander interessant aspect van onze studie is dat het raamwerk een "black-box"-algoritme optimaliseert, wat betekent dat we niets weten over hoe het werkt. We geven er parameters aan, en in ruil, we krijgen een score voor hun kwaliteit. Dit betekent dat het ook kan worden toegepast op verschillende apps en algoritmen (zelfs buiten het roboticaveld) die regelmatig moeten worden verfijnd."

Robot Kamido door Siléane
De onderzoekers onderzoeken nu manieren waarop robots kennis over objecten die tijdens simulaties zijn verkregen, kunnen overdragen naar echte taken met dezelfde objecten. Dit zou de efficiëntie van een robot verder verbeteren, waardoor het nieuwe dingen virtueel kan leren en deze vervolgens in het echte leven kan toepassen.
"De optimalisatie van parameters voor objecten die fysieke eigenschappen delen, kan ook leiden tot de opkomst van een dergelijk concept voor specifieke robots, Petit voegde eraan toe. "Bijvoorbeeld, een robot zou kunnen leren dat een 'platte, ' 'zwaar, ' 'lang, ' etc. object moet worden begrepen met specifieke waarden voor een subset van parameters. Dit kan worden gebruikt om mens-robot-interacties en leren met behulp van natuurlijke taal te verbeteren, bijvoorbeeld, met arbeiders die de robot helpen door een korte beschrijving te geven van de nieuwe objecten die moeten worden gehanteerd."
© 2018 Tech Xplore

Hoofdlijnen
- Vleermuizen en insecten vechten in de tropen
- Drie voorbeelden van een enkelvoudig allel-kenmerk
- Wetenschappers ontdekken dat schorpioenen zich richten op hun gif
- Kunnen milieutoxines de biologische klok verstoren?
- Nieuwe studie toont aan dat cannabis het geheugen van oudere muizen verhoogt
- Bijvangst verantwoordelijk voor achteruitgang Nieuw-Zeelandse zeeleeuw
- Verschillende populaties bosolifanten bijna instorten in Centraal-Afrika
- Hoe dicht zijn we bij het creëren van een universele bloedgroep?
- Synthetische seks in gist belooft veiligere medicijnen voor mensen
- Imec rapporteert voor het eerst directe groei van 2D-materialen op 300 mm wafers

- Consumentenvertrouwen VS stijgt naar record in 17 jaar

- Slimme skin voor flexibele monitoring

- Verbetering van 3D-geprinte protheses en integratie van elektronische sensoren

- Spraakassistenten zullen vertrouwen moeten opbouwen voordat ze vertrouwd waren met het feit dat ze ons volgden


 De aarde is een exoplaneet voor buitenaardse wezens:dit is wat ze zouden zien
De aarde is een exoplaneet voor buitenaardse wezens:dit is wat ze zouden zien- Memo's:Facebook stond vriendelijke fraude toe om te profiteren van kinderen
- Digitaliseren en repliceren van de wereld van materialen
- Verschillen tussen dwergplaneten, kometen, asteroïden en satellieten
- Astronomen ontdekken een pi-planeet ter grootte van de aarde met een baan van 3,14 dagen
- Gigantische Hawaii-telescoop om zich te concentreren op grote onbekenden van het universum
- Taal heeft een duistere politieke geschiedenis die mensen hun waardigheid ontneemt
- Het belastingplan van GOP's 2017 kwam het hardst neer op Californië, onderzoekers zeggen:
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Dutch | Danish | Norway | Swedish | German |

-
Wetenschap © https://nl.scienceaq.com
