Wetenschap
Een nieuw kaartbeheerproces voor visuele lokalisatie in buitenomgevingen
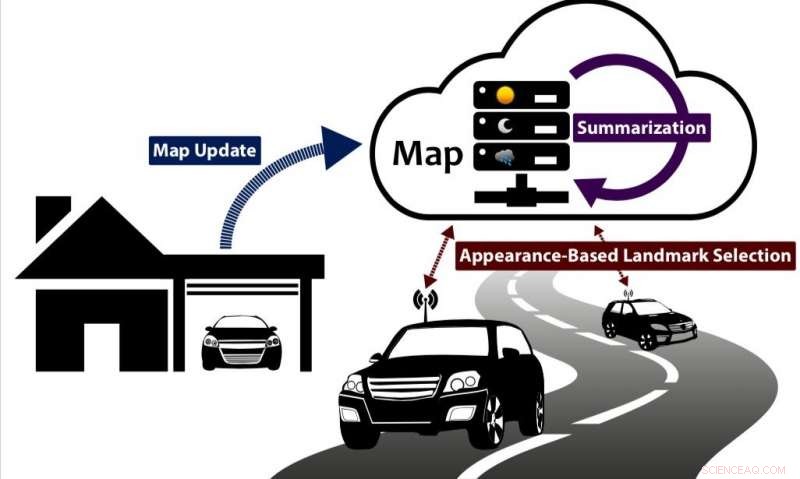
Een schematisch overzicht van ons "complete" visuele lokalisatie- en kaartsysteem. Krediet:Burki et al.
Onderzoekers van het Autonomous Systems Lab van ETH Zürich hebben onlangs een kaartbeheerproces ontwikkeld voor visuele lokalisatiesystemen, speciaal ontworpen voor werkzaamheden in buitenomgevingen waarbij meerdere voertuigen betrokken zijn. hun studie, gepresenteerd op het Intelligent Vehicles Symposium (IV) van dit jaar en beschikbaar op arXiv, gaat de belangrijkste uitdaging aan van het opnemen van grote hoeveelheden visuele lokalisatiegegevens in een levenslange visuele kaart, om consequent een effectieve lokalisatie te bieden onder alle omstandigheden.
"Zelflokalisatie is cruciaal voor elke soort mobiele robot, inclusief autonome voertuigen, " Mathias Burki, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Terwijl de meeste autonome onderzoeksvoertuigen zijn uitgerust met 3D LiDAR-sensoren, deze zijn nog duur en hun geschiktheid voor toekomstige massaproductie is dus twijfelachtig. Anderzijds, camerasensoren zijn erg goedkoop, en hebben al hun weg gevonden naar de huidige wagenparken (bijvoorbeeld voor parkeerassistentiesystemen). Daarom, we hebben het potentieel onderzocht van het gebruik van camera's als hoofdsensor voor nauwkeurige lokalisatie van autonome voertuigen."
Een van de belangrijkste uitdagingen bij het ontwikkelen van visuele lokalisatiesystemen voor buitenomgevingen is ervoor te zorgen dat deze systemen goed omgaan met uiterlijke veranderingen. Deze omvatten zowel veranderingen die op korte termijn plaatsvinden (bijvoorbeeld verlichting, schaduwen, enz.) en lange termijn (bijv. seizoenswisselingen, gebladerte, enzovoort.).
Uit eerder onderzoek bleek dat kaarten die zijn gemaakt voor visuele lokalisatie in theorie kunnen worden aangepast om te werken onder verschillende omstandigheden buitenshuis. Niettemin, het aanpassen van deze kaarten kan erg duur zijn, waarvoor aanzienlijke middelen worden besteed aan de servers die de kaarten onderhouden en aan de autonome voertuigen zelf. Hoewel er een aantal oplossingen zijn die kunnen helpen om de kosten te verlagen en de complexiteit van dit probleem aan te pakken, tot dusver, deze zijn alleen afzonderlijk onderzocht.
"Het doel van ons recente onderzoek was om verschillende componenten en benaderingen te combineren die de schaalbaarheid verbeteren, zoals offline kaartsamenvatting, en online op uiterlijk gebaseerde oriëntatiepuntselectie, om een volledig schaalbaar en hulpbronnenefficiënt lokalisatie- en kaartsysteem te bouwen, " legt Bürki uit. "We wilden ook in detail onderzoeken hoe goed dit systeem in de praktijk werkt, langdurige omstandigheden, hoe lang het duurt voordat de visuele kaarten convergeren naar een stabiele toestand, hoe goed de verschillende componenten die te maken hebben met schaalbaarheid samenwerken, en of de een de ander op een ongewenste manier verstoort."
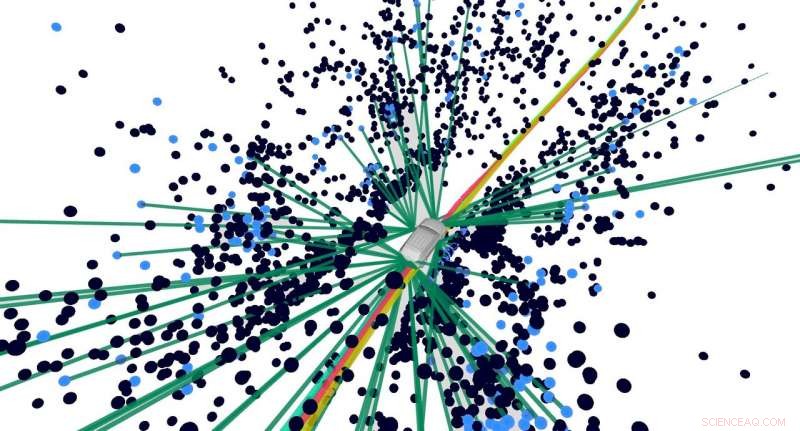
Een screenshot van het visuele lokalisatiesysteem van de onderzoekers. De donker- en lichtblauwe bollen geven de 3D-positie aan van de visuele oriëntatiepunten die worden gebruikt voor lokalisatie. De lichtblauwe geven aan welke worden geselecteerd door op uiterlijk gebaseerde oriëntatiepuntselectie, terwijl de duisteren degenen zijn die worden weggegooid. De groenachtige lijnen geven overeenkomsten aan tussen de live camerabeelden in de auto (van voor-, links-, achter- en rechtercamera), en de 3D-oriëntatiepunten op de kaart. Door deze wedstrijden de locatie (positie, oriëntatie) van de auto wordt afgeleid. De dikke gekleurde lijnen illustreren de trajecten waar de auto reed tijdens het opnemen van de datasets die werden gebruikt om de multi-sessiekaart te bouwen. Krediet:Burki et al.
Het door Bürki en zijn collega's ontwikkelde kaartbeheerproces werkt door in de loop van de tijd nieuwe datasets aan de kaart toe te voegen, het voortdurend bijwerken om beter om te gaan met nieuwe uiterlijke omstandigheden. Elke keer dat er een nieuwe dataset aan de kaart wordt toegevoegd, een volgende stap van het samenvatten van de kaart zorgt ervoor dat de grootte een bepaalde limiet niet overschrijdt.
"Als de nieuwe dataset is opgenomen onder omstandigheden die al goed worden gedekt door de kaart, de dataset wordt niet toegevoegd aan de kaart, maar de statistieken over de historische waarnemingen zijn verbeterd, wat in ruil daarvoor op uiterlijk gebaseerde oriëntatiepuntselectie in toekomstige sorties efficiënter maakt, " legt Burki uit.
De onderzoekers testten het nieuwe kaartbeheerproces in de echte wereld onder uitdagende buitenomstandigheden. De resultaten van hun evaluaties waren veelbelovend, wat suggereert dat hun lichtgewicht kaartbeheermechanisme zou kunnen helpen bij het ontwikkelen van visuele lokalisatiesystemen voor autonome voertuigen die goed werken onder verschillende omstandigheden, terwijl het ook beter presteert bij het selecteren van oriëntatiepunten.
"Onze meest betekenisvolle bevinding was dat het inderdaad mogelijk en praktisch haalbaar is om zo'n visueel lokalisatie- en kaartsysteem te bouwen dat a) is, en efficiënt blijft, b) is, en blijft schaalbaar, en c) op lange termijn nauwkeurige lokalisatie in buitenomgevingen levert, "Zei Bürki. "Een andere bevinding was dat online op uiterlijk gebaseerde oriëntatiepuntselectie en offline kaartsamenvatting goed samenwerken en elkaar aanvullen."
In de toekomst, de best presterende autonome voertuigen zullen hoogstwaarschijnlijk worden uitgerust met 3D LiDAR-sensoren, aangezien deze momenteel essentieel lijken om de veiligheid te garanderen en ervoor te zorgen dat het voertuig obstakels in zijn omgeving goed waarneemt, inclusief voetgangers. Onlangs, de kosten van deze sensoren zijn aanzienlijk gedaald, wat ook de wijdverbreide toepassing ervan in de komende jaren zou kunnen vergemakkelijken.
"We zullen ons onderzoek nu meer richten op de vraag hoe LiDAR-sensoren kunnen worden gebruikt om visuele lokalisatie te ondersteunen, " zei Bürki. "Vooral bij slechte lichtomstandigheden, camera's onvermijdelijk hun grenzen bereiken, terwijl LiDAR's ook goed geschikt zijn voor donkere omstandigheden."
© 2018 Tech Xplore
 Nieuwe experimentele strategie verheldert complexe kristalstructuur
Nieuwe experimentele strategie verheldert complexe kristalstructuur- De juiste mix van zouten om het leven op gang te krijgen
- Nieuwe katalysator voor waterstofproductie is een stap in de richting van schone brandstof
- Hoe de molariteit van een oplossing te veranderen
- Densiteitsexperimenten voor elementair
Hoofdlijnen
- Emotionele toestanden ontdekt in vissen
- Gelabelde delen van een lintworm
- De beste manieren om bacteriën te kweken op agar
- Een zich ontwikkelende plakkerige situatie
- Hands-on Science Activiteiten op Blood
- Ingewikkelde ijsgrotten in Antarctica May Harbor Unique Life
- Maak een lijst van de 3 stappen die zich voordoen tijdens de interfase
- De definitie van lichaamssystemen
- Nieuwe slangensoort verstopt zich in het volle zicht
- Geautomatiseerde lichtgewicht constructie vermindert gewicht en kosten
- Samenwerken om metaaldegradatie beter te begrijpen

- VS zegt geen basis om Boeing 737 MAX-jets aan de grond te houden na crash

- AT&T lanceert nieuwe online tv-service terwijl videoklanten vallen

- Onderzoekers ontwikkelen blockchain-protocol om namaak van farmaceutische producten te voorkomen


 Nieuwe coating verbergt temperatuurverandering van infraroodcamera's
Nieuwe coating verbergt temperatuurverandering van infraroodcamera's- Van moeder op dochter, Tunesische pottenbakkers geven voorouderlijke knowhow door
- Natuurkundige ontdekt nieuw 2D-materiaal dat materiaalwetenschap zou kunnen bevorderen
- Hoe de druk van waterstofgas te berekenen
- De reactie van het publiek op nieuwe technologieën in voedsel hangt af van het type technologie
- Waarom draaiende messen er raar uitzien op tv
- Moslim LGBTQI+ vluchtelingen hebben meer kans om asiel te krijgen in Duitsland als ze zich houden aan stereotypen, studie
- SDR-35 PVC pijp specificaties
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
