Wetenschap
Legeronderzoekers leren robots om betrouwbaardere teamgenoten te zijn voor soldaten

Een kleine onbemande Clearpath Husky-robot, die door ARL-onderzoekers werd gebruikt om een nieuwe techniek te ontwikkelen om robots snel nieuw traversaal gedrag aan te leren met minimaal menselijk toezicht. Krediet:Amerikaanse leger
Onderzoekers van het U.S. Army Research Laboratory en het Robotics Institute van de Carnegie Mellon University hebben een nieuwe techniek ontwikkeld om robots snel nieuw traversaal gedrag aan te leren met minimaal menselijk toezicht.
Met deze techniek kunnen mobiele robotplatforms autonoom navigeren in omgevingen terwijl ze acties uitvoeren die een mens in een bepaalde situatie van de robot zou verwachten.
De experimenten van de studie zijn onlangs gepubliceerd en gepresenteerd op de International Conference of Electrical and Electronics Engineers' International Conference on Robotics and Automation van het Institute of Electrical and Electronics Engineers in Brisbane, Australië.
ARL-onderzoekers Drs. Maggie Wigness en John Rogers voerden persoonlijke gesprekken met honderden conferentiebezoekers tijdens hun interactieve presentatie van twee en een half uur.
Volgens Wigness, een van de doelen van het onderzoeksteam in onderzoek naar autonome systemen is om betrouwbare autonome robotteamgenoten te leveren aan de Soldier.
"Als een robot als teamgenoot optreedt, taken kunnen sneller worden uitgevoerd en meer situationeel bewustzijn kan worden verkregen, zei Wigness. "Verder, robotteamgenoten kunnen worden gebruikt als eerste onderzoeker voor potentieel gevaarlijke scenario's, waardoor soldaten verder van het kwaad worden gehouden."
Om dit te behalen, Wigness zei dat de robot zijn geleerde intelligentie moet kunnen gebruiken om waar te nemen, redeneren en beslissingen nemen.
"Dit onderzoek richt zich op hoe robotintelligentie kan worden geleerd van een paar menselijke voorbeelddemonstraties, " Wigness zei. "Het leerproces is snel en vereist minimale menselijke demonstratie, waardoor het een ideale leertechniek is voor on-the-fly leren in het veld wanneer de missievereisten veranderen."
ARL- en CMU-onderzoekers richtten hun eerste onderzoek op het leren van robottraversalgedrag met betrekking tot de visuele perceptie van de robot van terrein en objecten in de omgeving.
Specifieker, de robot leerde navigeren vanaf verschillende punten in de omgeving terwijl hij aan de rand van een weg bleef, en ook hoe je heimelijk kunt reizen met gebouwen als dekking.
Volgens de onderzoekers is verschillende missietaken, het meest geschikte aangeleerde verplaatsingsgedrag kan tijdens de robotwerking worden geactiveerd.
Dit wordt gedaan door gebruik te maken van inverse optimale controle, ook vaak aangeduid als inverse versterking leren, dat is een klasse van machine learning die een beloningsfunctie probeert te herstellen op basis van een bekend optimaal beleid.
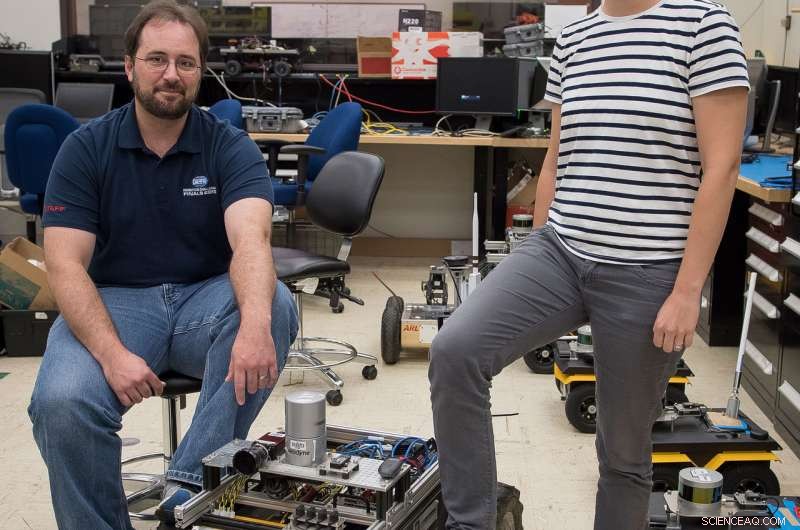
ARL-onderzoekers Drs. Maggie Wigness en John Rogers poseren met een kleine onbemande Clearpath Husky-robot in hun laboratorium in het Adelphi Laboratory Center in Maryland. Krediet:Amerikaanse leger
In dit geval, een mens demonstreert het optimale beleid door een robot langs een traject te sturen dat het beste aansluit bij het aan te leren gedrag.
Deze trajectvoorbeelden worden vervolgens gerelateerd aan de visuele terrein-/objectkenmerken, zoals gras, wegen en gebouwen, om een beloningsfunctie te leren met betrekking tot deze omgevingskenmerken.
Hoewel vergelijkbaar onderzoek bestaat op het gebied van robotica, wat ARL doet is bijzonder uniek.
"De uitdagingen en operationele scenario's waarop we ons hier bij ARL concentreren, zijn buitengewoon uniek in vergelijking met ander onderzoek dat wordt uitgevoerd, Wigness zei. "We proberen intelligente robotsystemen te creëren die betrouwbaar werken in oorlogsomgevingen, wat betekent dat de scène zeer ongestructureerd is, mogelijk luidruchtig, en we moeten dit doen gezien relatief weinig a priori kennis van de huidige toestand van het milieu. Het feit dat onze probleemstelling zo anders is dan zoveel andere onderzoekers, stelt ARL in staat om een enorme impact te maken in het onderzoek naar autonome systemen. Onze technieken, per definitie van het probleem, moet bestand zijn tegen ruis en het vermogen hebben om te leren met relatief kleine hoeveelheden gegevens."
Volgens Wigness, dit voorlopige onderzoek heeft de onderzoekers geholpen om de haalbaarheid aan te tonen van het snel leren van een codering van traversaal gedrag.
"Terwijl we dit onderzoek naar een hoger niveau tillen, we zullen ons gaan concentreren op meer complex gedrag, waarvoor mogelijk moet worden geleerd van meer dan alleen visuele waarnemingsfuncties, " zei Wigness. "Ons leerkader is flexibel genoeg om a priori informatie te gebruiken die mogelijk beschikbaar is over een omgeving. Dit kan informatie zijn over gebieden die waarschijnlijk zichtbaar zijn voor tegenstanders of gebieden waarvan bekend is dat ze betrouwbare communicatie hebben. Deze aanvullende informatie kan relevant zijn voor bepaalde missiescenario's, en leren met betrekking tot deze functies zou de intelligentie van de mobiele robot vergroten."
De onderzoekers onderzoeken ook hoe dit soort gedragsleren wordt overgedragen tussen verschillende mobiele platforms.
Hun evaluatie tot nu toe is uitgevoerd met een kleine onbemande Clearpath Husky-robot, die een gezichtsveld heeft dat relatief laag bij de grond is.
"Transferring this technology to larger platforms will introduce new perception viewpoints and different platform maneuvering capabilities, " Wigness said. "Learning to encode behaviors that can be easily transferred between different platforms would be extremely valuable given a team of heterogeneous robots. In dit geval, the behavior can be learned on one platform instead of each platform individually."
This research is funded through the Army's Robotics Collaborative Technology Alliance, or RCTA, which brings together government, industrial and academic institutions to address research and development required to enable the deployment of future military unmanned ground vehicle systems ranging in size from man-portables to ground combat vehicles.
"ARL is positioned to actively collaborate with other members of the RCTA, leveraging the efforts of top researchers in academia to work on Army problems, " Rogers said. "This particular research effort was the synthesis of several components of the RCTA with our internal research; it would not have been possible if we didn't work together so closely."
uiteindelijk, this research is crucial for the future battlefield, where Soldiers will be able to rely on robots with more confidence to assist them in executing missions.
"The capability for the Next Generation Combat Vehicle to autonomously maneuver at optempo in the battlefield of the future will enable powerful new tactics while removing risk to the Soldier, " Rogers said. "If the NGCV encounters unforeseen conditions which require teleoperation, our approach could be used to learn to autonomously handle these types of conditions in the future."
 Nieuw nanoporeus metaalschuim gebruikt zonlicht om water op te ruimen
Nieuw nanoporeus metaalschuim gebruikt zonlicht om water op te ruimen- De kop-staart van kikkervisjes:de dynamiek van polymeren met een zeer unieke vorm
- Hoe maak je een lab-on-a-chip helder en biocompatibel (met minder bloedspatten)
- De energiekloof afstemmen:een nieuwe benadering voor organische halfgeleiders
- Hoe zuren zich gedragen in de ultrakoude interstellaire ruimte
- Britse experts waarschuwen voor maatregelen tegen klimaatwetenschap door Trump
- Biden dringt er bij landen op aan om de methaanuitstoot met 30% te verminderen:waarom het cruciaal is voor de bescherming van het klimaat en de gezondheid
- Californië voorkomt meer stroomuitval te midden van hittegolf
- Nieuw getranscribeerde kroniek beschrijft extreme weersomstandigheden die Bristol 400 jaar geleden troffen
- Orkanen kunnen leiden tot veerkracht - goed nieuws volgt slecht nieuws voor de tropische bossen van Puerto Rico
Hoofdlijnen
- Menselijke schedelgroei
- mensen, in tegenstelling tot apen, verander de concurrentiesituatie in een coöperatieve
- Wetenschappers onderzoeken hoe verschillende huizen en levensstijlen van invloed zijn op welke insecten bij ons leven
- Hoe een DNA-monster wordt verzameld en voorbereid voor onderzoek
- Wat zou er gebeuren als de cel geen DNA had?
- Hoe regenereert de huid?
- Het weer in november is een lastige tijd voor schildpadden
- De microbiologische kunst van het maken van een betere worst
- Wat zijn de structurele delen van de lange botten in het lichaam?
- Kwetsbaarheid Intel-processor kan miljoenen pc's in gevaar brengen
- Schots bedrijf stelt hydro-opslagfaciliteit voor nabij Loch Ness

- Nieuwe exploitatietechnieken en verdedigingen voor DOP-aanvallen

- Bot kan mensen verslaan in multiplayer-games met verborgen rollen

- Zachte tactiele logica-technologie verdeelt de besluitvorming over rekbaar materiaal


 Nieuwe machine om de ultrasnelle beweging van materie te onderzoeken
Nieuwe machine om de ultrasnelle beweging van materie te onderzoeken- Klimaatverandering en plunderaars bedreigen de archeologie van Mongolië
- Onderzoek werpt licht op de onderliggende mechanica van zachte filamenten
- Massale evacuaties als grote cycloon op weg naar Zuid-Azië
- De rol van enkele kristallen bij het maken van nieuwe materialen
- Afbeelding:Ruimteweereffecten
- Dunne films voor efficiëntere zonnecellen
- Oude mensachtigen gebruikten vuur om stenen werktuigen te maken
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
