Wetenschap
Onderzoek werpt licht op de onderliggende mechanica van zachte filamenten
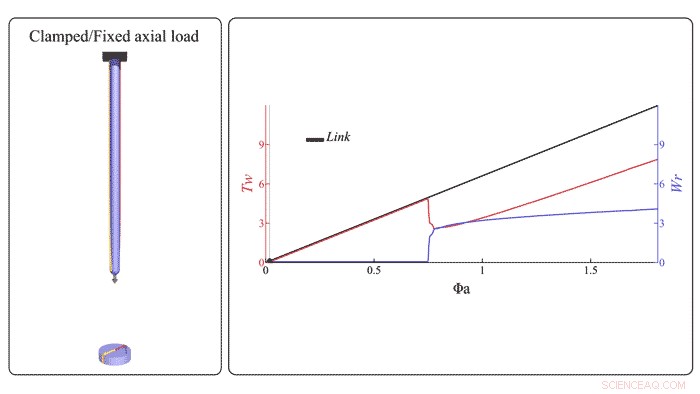
Een filament wordt aan het boveneinde vastgeklemd en een klein beetje voorgerekt door een neerwaartse axiale belasting op het ondereinde uit te oefenen. De onderkant wordt dan gedraaid, het constant houden van de axiale belasting aan de onderkant. Nadat een kritische hoeveelheid twist is ingebracht, het filament knikt spontaan in een lus. Krediet:Nicholas Charles/Harvard SEAS
Kunstmatige spieren zullen de zachte robots en draagbare apparaten van de toekomst aandrijven. Maar er moet meer worden begrepen over de onderliggende mechanica van deze krachtige structuren om nieuwe apparaten te kunnen ontwerpen en bouwen.
Nutsvoorzieningen, onderzoekers van de Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) hebben enkele van de fundamentele fysieke eigenschappen van kunstmatige spiervezels ontdekt.
"Dunne zachte filamenten die gemakkelijk kunnen uitrekken, kromming, twist of shear zijn in staat tot extreme vervormingen die leiden tot knoopachtige, vlechtachtige of lusachtige structuren die gemakkelijk energie kunnen opslaan of vrijgeven, " zei L. Mahadevan, de Lola England de Valpine hoogleraar Toegepaste Wiskunde, van Organismische en Evolutionaire Biologie, en van Natuurkunde. "Dit is recentelijk door een aantal experimentele groepen uitgebuit om prototypische kunstmatige spiervezels te maken. Maar hoe de topologie, geometrie en mechanica van deze slanke vezels bij elkaar komen tijdens dit proces was niet helemaal duidelijk. Onze studie verklaart de theoretische principes die ten grondslag liggen aan deze vormtransformaties, en werpt licht op de onderliggende ontwerpprincipes."
"Zachte vezels zijn de basiseenheid van een spier en kunnen in alles worden gebruikt, van robotica tot slim textiel dat kan reageren op prikkels zoals hitte of vochtigheid, " zei Nicolaas Charles, een doctoraat student Toegepaste Wiskunde en eerste auteur van de paper. "De mogelijkheden zijn eindeloos, als we het systeem kunnen begrijpen. Ons werk verklaart de complexe morfologie van zachte, sterk uitgerekte en gedraaide vezels en geeft richtlijnen voor de beste ontwerpen."
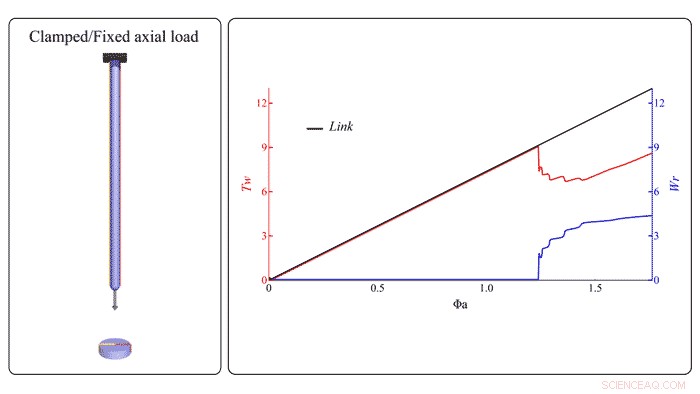
Een filament wordt aan het boveneinde vastgeklemd en voorgerekt door een neerwaartse axiale belasting op het ondereinde uit te oefenen. Nadat een kritische hoeveelheid twist is ingebracht, de gloeidraad knikt spontaan in een vorm die bekend staat als een solenoïde. Krediet:Nicholas Charles/Harvard SEAS
Het onderzoek is gepubliceerd in Fysieke beoordelingsbrieven .
Zachte vezels, of filamenten, kan worden uitgerekt, geschoren, gebogen of gedraaid. Hoe deze verschillende acties op elkaar inwerken om knopen te vormen, vlechtjes, en helices is belangrijk voor het ontwerp van zachte actuatoren. Stel je voor dat je een elastiekje zo strak mogelijk uitrekt en draait. Naarmate de twist strakker en strakker wordt, een deel van de band springt uit het vlak en begint om zichzelf heen te draaien in een spoel of knoop. Deze spoelen en lussen, in de juiste vorm, kan worden aangewend om de geknoopte vezel te activeren.
De onderzoekers ontdekten dat verschillende niveaus van rek en draaiing resulteren in verschillende soorten complexe niet-vlakke vormen. Ze karakteriseerden welke vormen leiden tot geknikte lussen, die te strakke spoelen, en welke tot een mengsel van beide. Ze ontdekten dat voorrek belangrijk is voor het vormen van spoelen, omdat deze vormen het meest stabiel zijn bij uitrekken, en gemodelleerd hoe dergelijke spoelen kunnen worden gebruikt om mechanisch werk te produceren.
"Dit onderzoek geeft ons een eenvoudige manier om te voorspellen hoe zachte filamenten zullen reageren op draaien en uitrekken, " zei Karel.
"Vooruit gaan, ons werk kan ook relevant zijn in andere situaties met verwarde filamenten, zoals in haarkrullen, polymeerdynamica en de dynamica van magnetische veldlijnen in de zon en andere sterren, ' zei Mahadevan.
 Verweerde microplastics blijken gemakkelijker te worden opgenomen door muizencellen dan ongerepte microplastics
Verweerde microplastics blijken gemakkelijker te worden opgenomen door muizencellen dan ongerepte microplastics- 10 schatten die goed verloren gaan als de zeespiegel stijgt
- Zeldzame tropische storm teistert noordoosten van de Verenigde Staten
- Catastrofale gebeurtenissen brengen bossen duizenden kilometers ver naar een begrafenis op zee
- Indonesië gaat 49 containers met afval terug naar Europa ons
Hoofdlijnen
- Studie verlicht genetische oorsprong van diversiteit in huidskleur
- Wat is de rol van glucose in het lichaam?
- Chloroplasten zijn de plantencellen die energie produceren
- Hoe de griezelige verkenningen van de zomer
- De soorten cellen die aan een membraan gebonden zijn Nucleus
- Hoe antidepressiva werken
- Artefacten suggereren aankomst van mensen in Australië 18,
- Je wandeling is zo duidelijk dat het diepe persoonlijkheidskenmerken kan onthullen
- Vogelherkenning
- Siliciumchips combineren licht en ultrageluid voor een betere signaalverwerking

- Schoenkoordtheorie:de wetenschap laat zien waarom schoenveters loskomen

- Universele wetten in de inslagdynamiek van stofagglomeraten onder microzwaartekracht

- In combinatie met licht - twee deeltjes zijn beter dan één

- Wetenschappers ontdekken hoe cyberinbraken kunnen worden gestopt

 Studie zet vraagtekens bij de duurzaamheid van plantaardige ingrediënten als vervanging van vismeel
Studie zet vraagtekens bij de duurzaamheid van plantaardige ingrediënten als vervanging van vismeel- Afbeelding:De Niagara-watervallen van Mars
- Ware positie berekenen
- SpaceX Resupply-missie zal ISS-bemanning helpen een heleboel wetenschap te bestuderen
- Methode kan SARS-CoV-2-tests in verschillende rioleringssystemen verbeteren
- Hoe Polar Bears Camouflage?
- Afbeelding:Hubble ziet een gesmolten ring
- Stichtingsfinanciering verandert internationale berichtgeving
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
