Wetenschap
Vleesetende planten inspireren slimme gladde oppervlakken en bionische robots
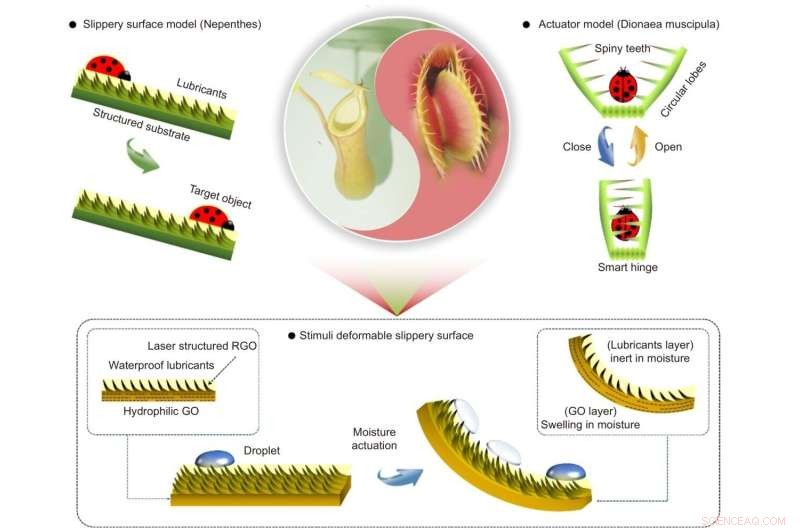
Basisconcept van hybride bionisch, op vocht reagerend, vormveranderend glad oppervlak geïnspireerd op vleesetende planten met meerdere vormen. De Nepenthes-bekerplant vangt passief insecten met behulp van een met smeermiddel doordrenkt glad oppervlak. De Dionaea muscipula jaagt actief via een op stimuli reagerend activeringsmechanisme. We combineerden de gladde oppervlakken (passieve prooi) en stimuli-responsieve activering (actieve prooi), dus stelden we een hybride bionische, vochtvervormbare, gladde, op het oppervlak gebaseerde GO voor, die zowel actieve als passieve druppelmanipulatie mogelijk maakt. GO:grafeenoxide; RGO, verminderde GO. Krediet:Compuscript Ltd
Een nieuwe publicatie van Opto-Electronic Advances bespreekt hoe vleesetende planten slimme gladde oppervlakken en bionische robots inspireren.
Vleesetende planten hebben innovaties geïnspireerd van geavanceerde, op prikkels reagerende actuatoren en gladde oppervlakken met smeermiddel. Het blijft echter een uitdaging om hybride bionische apparaten te ontwikkelen die de actieve en passieve vangmogelijkheden van vleesetende planten combineren. Het onderzoeksteam ontwikkelde een op vocht reagerend, vormveranderend glad oppervlak. Ze integreerden een met smeermiddel doordrenkt glad oppervlak met een LRGO/GO dubbellaagse actuator. Het team heeft een reeks proof-of-concept-actuatoren voorbereid, waaronder een slimme kikkertong en een slimme bloem, die actieve/passieve vangst, druppelmanipulatie en detectie demonstreren.
Vleesetende planten kunnen kleine insecten vangen en verteren door geavanceerde bedieningsmechanismen of unieke bevochtigbaarheid van het oppervlak. Dit vermogen heeft de ontwikkeling van kunstmatige slimme oppervlakken/apparaten voor technische toepassingen geïnspireerd, zoals anti-icing-oppervlakken, anti-biofouling, druppelcondensatie en druppelmanipulatie. Het nabootsen van hun vanggedrag heeft geleid tot innovatieve strategieën voor het ontwerpen van synthetische oppervlakken, actuatoren en robots.
Over het algemeen verschilt het vangmechanisme van vleesetende planten tussen verschillende soorten, die in twee categorieën kunnen worden ingedeeld:actieve vangst en passieve vangst. Hybride bionische apparaten die de verdiensten van de twee verschillende soorten vleesetende planten combineren, met zowel positieve als passieve vangcapaciteiten, zijn echter nog steeds zeldzaam. The combination of Dionaea muscipula-inspired actuators with a slippery surface that mimics the Nepenthes pitcher plant is beneficial to both actuator design and the development of a smart surface with super wettability. Nevertheless, it is challenging to reach this end.
Femtosecond laser direct writing (FsLDW) induced photoreduction and simultaneous structuring to prepare a GO and LRGO bilayer actuator that enables dynamic deformation under moisture actuation. After that, a lubricant-infused slippery surface was integrated with the graphene actuator by immobilizing lubricant at the LRGO side through the capillary forces.
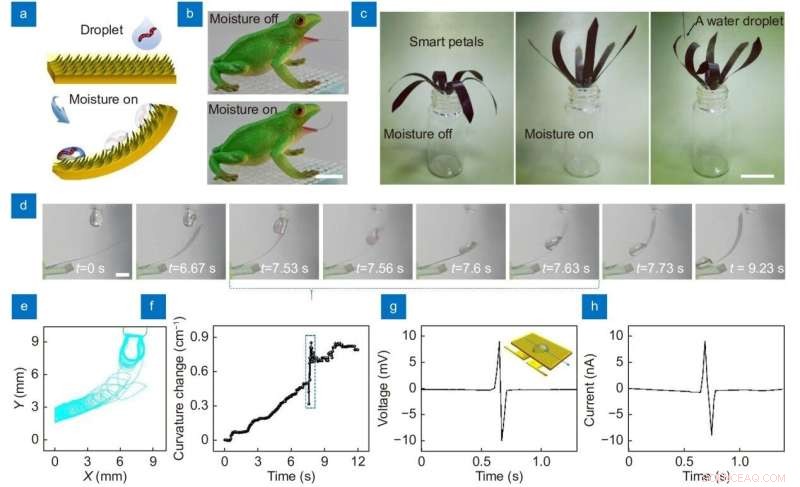
The manipulation of droplets on moisture responsive shape-morphing slippery surface. (a) Schematic illustration for the active and passive manipulation of a droplet containing live tubificidaes using the shape-morphing slippery surface. (b) The photographs of shape-morphing slippery frog tongue. The scale bar is 1.5 cm. (c) A smart water droplet harvesting flower. Every flower petal is made of the shape-morphing slippery surface (oil-LRGO/GO). The scale bar is 1.5 cm. (d) Moisture triggered active approach to water droplets containing live tubificidaes and the passive sliding behavior on the shape-morphing slippery surface. The scale bar is 0.5 cm. (e) The corresponding trajectory of the water droplet peripheries during the dynamic process. (f) The curvature changes of the shape-morphing slippery surface in (d). (g) The open-circuit voltage and (h) short-circuit current. Krediet:Compuscript Ltd
The two types of carnivorous plants demonstrate distinct strategies for trapping prey. Nepenthes pitcher plants catch insects through a passive trapping mechanism with the help of lubricants-infused slippery surfaces. In contrast, Dionaea muscipula performs an active trapping behavior through a sophisticated actuating mechanism. The concept of the hybrid bionic model is the combination of the two tapping behaviors within one synthetic smart surface here, which the research team called a stimuli deformable slippery surface.
Traditional stimuli-responsive actuators enable reversible deformation under external stimuli. They reveal the great potential for developing trapping robots. However, in most cases, simple bending deformation cannot trap insects because of the slow response to environmental stimuli or the lack of surface wettability control. The team combined the moisture-responsive actuator with a lubricant-infused slippery surface together. The combined effect of actuation and slippery property endows the oil-infused LRGO/GO film with enhanced trapping ability.
The research team demonstrated a moisture-responsive shape-morphing slippery surface that can contact droplets actively and let them slide away passively. Based on this hybrid bionic concept, a smart frog tongue that can catch and manipulate droplets containing live tubificidaes is prepared. Notably, the slippery surface can bend under moisture actuation, get in touch with the droplet, and let it slide to the bottom, demonstrating both active catching and passive trapping capabilities.
In conclusion, the in-situ integration of the lubricant-infused slippery surface with the bilayer actuator does not degrade the actuating performance. It also improves its deformation degrees under moisture actuation. The presence of an oil layer can entirely prevent the transmission of water molecules through the LRGO side, and selective water adsorption only occurs within the GO layer. As a result, the oil-LRGO/GO actuator demonstrated large deformation curvature, short response/recovery time, and improved stability. For practical applications, laser interference ablation that uses an interference effect for periodical patterning is more effective. The significance of this work lies in the fabrication of a shape-morphing slippery surface with hybrid bionic functionalities of both stimuli-responsive deformation and oil-lubricated slippery properties.
The combination of shape-morphing ability with the slippery surface benefits both actuating performance and the usefulness of a smart surface with super wettability. It leads to new applications, such as droplet collection, manipulation, and rainfall sensing. Moisture-responsive actuators can directly harness energy from naturally occurring or engineered evaporation from water. That can subsequently be converted to mechanical energy or electricity, such as weather-responsive architectural systems, smart textiles, and soft robots. The cross-species bio-inspired materials benefit both actuator design and the development of smart surfaces with super wettability. The moisture-responsive shape-morphing slippery surface reveals great potential for developing bionic robots. + Explore further
Liquid-infused slippery surface performs better than superhydrophobic surface in long-term corrosion resistance
 Levens-emulerende moleculen vertonen een basismetabolisme
Levens-emulerende moleculen vertonen een basismetabolisme- Waar komt deze vervuiling vandaan?
- NIST presenteert eerste real-world test van nieuwe sensorontwerpen voor schoorsteenemissies
- Nieuwe strategie ter bevordering van hergebruik van met koolstofvezel versterkte kunststoffen
- Hoe pKa naar Ka te converteren
Hoofdlijnen
- Onderzoek onthult geheimen van de ratrace van inheemse knaagdieren naar nieuwe landen
- Waarom we trekdieren niet te snel de schuld moeten geven van wereldwijde ziekten
- Maak een lijst van de soorten informatie die gevonden kan worden door de sequentie van een DNA-molecuul te kennen Molecule
- Onderzoek toont aan dat een enkel gewas beter kan presteren dan mengsels
- Microbiologen verbeteren de smaak van bier
- Hoeveel tijd kost het om een DNA-molecuul te repliceren?
- Verschillen tussen Protista en Monera
- Kunnen familieleden van wilde aardappelen de zebrachipziekte helpen temmen?
- Dieetbeperking en levensduur bij mannelijke en hermafrodiete wormen
- Ongedierteresistentie tegen biotech-gewassen stijgt

- De terugkeer van wolven naar Oregon brengt conflicten en kansen

- Samengestelde gezichten van DNA helpen bij het oplossen van koude gevallen

- Human Heart Science Projects

- Het zijn voornamelijk moeders die mitochondriën doorgeven - en een nieuwe theorie zegt dat dit te wijten is aan het eerste seksuele conflict


 Mobius-strips:zo eenvoudig te maken, zo moeilijk te doorgronden
Mobius-strips:zo eenvoudig te maken, zo moeilijk te doorgronden- Frankrijk roept op om hulp bij het bestrijden van branden in de Cote d'Azur
- Hittegolven in Parijs:kunnen we zonder airconditioning?
- Op koolstof gebaseerde nanomaterialen laten veelbelovende resultaten zien tegen SARS-CoV-2 en 12 andere virussen
- Oudste geschrift ooit gevonden in Israël geïdentificeerd op oude aardewerkscherven
- Studie onthult onderliggende genetische basis voor communicatie en sociaal gedrag van halictidebijen
- 'S Werelds snelste door de mens gemaakte draaiende object kan helpen bij het bestuderen van de kwantummechanica
- Kleine sondes zijn veelbelovend voor toekomstige NASA-missies
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
