Wetenschap
Curiosity Marsrover maakt nieuwe selfie voor recordklim
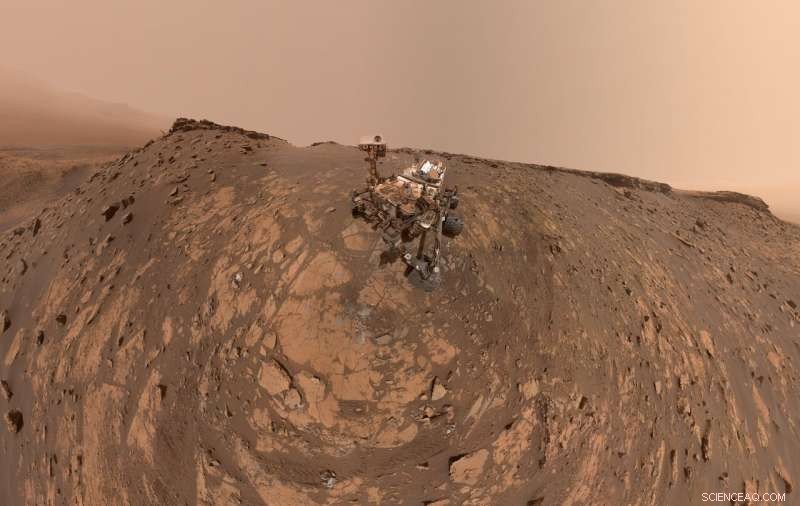
Deze selfie werd op 26 februari gemaakt door NASA's Curiosity Mars-rover 2020 (de 2, 687e Marsdag, of sol, van de missie). De afbrokkelende rotslaag bovenaan het beeld is "het Greenheugh Fronton, " die Curiosity kort na het maken van de foto beklom. Credit:NASA/JPL-Caltech/MSSS
NASA's Curiosity Mars-rover heeft onlangs een record gevestigd voor het steilste terrein dat het ooit heeft beklommen, de top van het "Greenheugh-fronton, " een brede rotsplaat die bovenop een heuvel ligt. En voordat je dat doet, de rover nam een selfie, het vastleggen van de scène net onder Greenheugh.
Voor de rover is een gat geboord tijdens het bemonsteren van een vast doelwit genaamd "Hutton". De hele selfie is een 360-graden panorama dat aan elkaar is genaaid uit 86 afbeeldingen die naar de aarde zijn gestuurd. De selfie legt de rover vast ongeveer 11 voet (3,4 meter) onder het punt waar hij op het afbrokkelende fronton klom.
Curiosity bereikte uiteindelijk de top van de helling op 6 maart (de 2, 696e Marsdag, of sol, van de missie). Er waren drie ritten nodig om de heuvel te beklimmen, waarvan de tweede de rover 31 graden heeft gekanteld - de meeste die de rover ooit op Mars heeft gekanteld en net minder dan het 32-graden kantelrecord van de nu inactieve Opportunity rover, speelt zich af in 2016. Curiosity nam de selfie op 26 februari, 2020 (Sol 2687).
Sinds 2014, Nieuwsgierigheid rolt Mount Sharp op, een 3 mijl hoge (5 kilometer hoge) berg in het midden van Gale Crater. Rover-operators bij NASA's Jet Propulsion Laboratory in Zuid-Californië brengen elke rit zorgvuldig in kaart om ervoor te zorgen dat Curiosity veilig is. De rover loopt nooit het gevaar zo sterk te kantelen dat hij zou omslaan - het rocker-bogie-wielsysteem van Curiosity maakt het mogelijk om veilig tot 45 graden te kantelen - maar de steile aandrijvingen zorgen ervoor dat de wielen op hun plaats draaien.
Hoe worden selfies gemaakt?
Voor de klim, Curiosity gebruikte de zwart-witte navigatiecamera's op zijn mast om, Voor de eerste keer, een korte film opnemen van zijn "selfiestick, " ook wel bekend als zijn robotarm.
De missie van Curiosity is om te onderzoeken of de omgeving van Mars miljarden jaren geleden het microbiële leven had kunnen ondersteunen. Een hulpmiddel om dat te doen is de Mars Hand Lens Camera, of MAHLI, bevindt zich in de toren aan het einde van de robotarm. Deze camera biedt een close-up van zandkorrels en rotsstructuren, vergelijkbaar met hoe een geoloog een vergrootglas in de hand gebruikt om het veld op aarde van dichterbij te bekijken.
Door de toren naar de rover te draaien, het team kan MAHLI gebruiken om nieuwsgierigheid te tonen. Omdat elke MAHLI-afbeelding slechts een klein gebied beslaat, het vereist veel afbeeldingen en armposities om de rover en zijn omgeving volledig vast te leggen.
"We krijgen zo vaak de vraag hoe Curiosity een selfie maakt, " zei Doug Ellison, cameraman van Curiosity bij JPL. "We dachten dat de beste manier om het uit te leggen zou zijn om de rover iedereen vanuit zijn eigen gezichtspunt te laten zien hoe het moet."
 Nieuw kathodemateriaal voor hoogwaardige natriumionbatterijen zou kunnen profiteren van grootschalige energieopslag
Nieuw kathodemateriaal voor hoogwaardige natriumionbatterijen zou kunnen profiteren van grootschalige energieopslag- Wetenschappers ontwikkelen goedkope, vanadiumstroombatterijstapel met hoge vermogensdichtheid
- Nieuwe doorbraak maakt het makkelijker om oud koffieafval om te zetten in schonere biobrandstoffen
- De komende verstoring van OLED-technologieën
- Neutronen onthullen snelle translatie van methaan op het grensvlak van twee clathraatstructuren
- Belasting plastic meeneemboxen, de gesel van de oceanen
- Studie toont erosie van ozonlaag aan die verantwoordelijk is voor massale uitstervingsgebeurtenis
- Dramatische verschuiving naar Atlantisch klimaat in hotspot voor opwarming van de Noordpool
- Microbiële ecologie levert nieuwe inzichten op voor toekomstig behoud van scheepswrakken
- 14 miljoen ton microplastics op zeebodem:Australisch onderzoek
Hoofdlijnen
- Welke soorten moleculen katalyseren RNA-splitsing?
- Hoe heet een wetenschapper die planten bestudeert?
- Mensen evolueren nog steeds - Heres the Evidence
- Cladistics: Definitie, methode en voorbeelden
- Hoe de hormonen van de hypofyse te onthouden
- Nieuwe techniek doorzoekt het genoom op genen die ziekten bestrijden
- Ontdekking van circadiane klokken kan de waterefficiëntie in voedselplanten helpen verhogen
- Verschillen tussen een neuron en een neuroglia
- Wat is het diploïde nummer?




 Armadillo eetgewoonten
Armadillo eetgewoonten - Trump ontmoet Apple CEO in Witte Huis om over handel te praten
- Studie vindt dat inheemse cultuur de resultaten van kinderen verbetert
- Onderzoek inspecteert de emissie van milliseconde pulsar PSR J0218+4232
- FAST helpt bij het onthullen van de oorsprong van snelle radio-uitbarstingen
- 1 op de 10 kinderen die getroffen zijn door bosbranden is inheems. We hebben ze te lang genegeerd
- Nummers schrijven in uitgebreide vorm
- Schildpad die vislijn heeft ingeslikt, losgelaten in oceaan
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
