Wetenschap
Mars InSight-lander om bovenop de mol te duwen

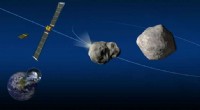
NASA's Mars InSight-lander om bovenop de 'mol' te duwen. NASA InSight heeft onlangs zijn robotarm dichter bij zijn graafapparaat gebracht, genaamd de "mol, " ter voorbereiding om op zijn top te duwen, of achterkap. Krediet:NASA/JPL-Caltech
Na bijna een jaar proberen in het oppervlak van Mars te graven, de hittesonde van NASA's InSight-lander staat op het punt een duw te krijgen. Het missieteam is van plan om de primeur op de robotarm van InSight te geven om de "mol, " de mini heimachine die is ontworpen om zichzelf tot wel 5 meter naar beneden te hameren. Ze hopen dat als ze de top van de mol naar beneden duwen, ook wel de achterdop genoemd, zal ervoor zorgen dat het niet terugtrekt uit zijn hol op Mars, zoals het de afgelopen maanden twee keer deed nadat het zichzelf bijna had begraven.
Onderdeel van een instrument genaamd het Heat Flow and Physical Properties Package, of HP 3 , de mol is een 16-inch lange (40 centimeter lange) spike uitgerust met een intern hamermechanisme. Terwijl hij in de grond graaft, het is ontworpen om een lintachtige ketting met zich mee te slepen die zich uitstrekt van het ruimtevaartuig. Temperatuursensoren zijn ingebed langs de ketting om de warmte te meten die diep uit het binnenste van de planeet komt om belangrijke wetenschappelijke details over de vorming van Mars en alle rotsachtige planeten te onthullen, inclusief aarde. HP3 werd aan NASA geleverd door het Duitse lucht- en ruimtevaartcentrum, of DLR.
Het team heeft tot nu toe vermeden om op de achterste dop te duwen om mogelijke schade aan de ketting te voorkomen.
De mol kwam vast te zitten op 28 februari, 2019, de eerste dag van het hameren. Het InSight-team heeft sindsdien vastgesteld dat de bodem hier anders is dan op andere delen van Mars. InSight landde in een gebied met een ongewoon dikke duricrust, of een laag gecementeerde grond. In plaats van los en zandachtig te zijn, zoals verwacht, de vuilkorrels plakken aan elkaar.
De mol heeft wrijving van de grond nodig om naar beneden te reizen; zonder het, terugstoot van zijn zelfbeukende actie zorgt ervoor dat het eenvoudig op zijn plaats stuitert. Ironisch, losse grond, niet duricrust, zorgt voor die wrijving als het rond de mol valt.
Vorige zomer, begon het InSight-team de schep van de robotarm te gebruiken om op de zijkant van de mol te drukken, een techniek genaamd "pinning" die net genoeg wrijving toevoegde om het te helpen graven zonder in contact te komen met de fragiele wetenschappelijke ketting die is verbonden met de achterste dop van de mol.
Terwijl pinnen hielp, de mol kwam twee keer terug uit de bodem van Mars, mogelijk door bodemopbouw van onderaf. Met weinig alternatieven over, het team heeft besloten om te proberen de mol te helpen graven door voorzichtig op zijn achterste dop te drukken terwijl hij probeert de ketting te ontwijken.
Het kan verschillende pogingen kosten om de push-up van de back-cap te perfectioneren, net zoals pinnen deed. Gedurende eind februari en begin maart, De arm van InSight wordt in positie gemanoeuvreerd, zodat het team kan testen wat er gebeurt als de mol kort hamert.
In de tussentijd, het team overweegt ook om de schep te gebruiken om meer aarde in het gat rond de mol te brengen. Dit kan meer druk en wrijving veroorzaken, waardoor het eindelijk kan graven. Of ze deze route volgen, hangt af van hoe diep de mol kan reizen na het duwen van de back-cap.
 Wetenschappers simuleren de intracellulaire omgeving van een lichtgevende bacteriecel
Wetenschappers simuleren de intracellulaire omgeving van een lichtgevende bacteriecel- Onthulling van de nare werking van transvetzuren in het bloed
- Onderzoekers vinden grote lineaire negatieve thermische uitzetting in intermetallische Cr-Se-Te-verbindingen
- Overgangsmetalen en hun gebruik
- Polymer twin:nieuw implantaat imiteert botstructuur
- Duizenden vluchten voor vulkaan Bali, maar sommigen blijven zitten of rennen ernaartoe
- Mogelijke toename van het aantal oersterke fronten boven Europa
- Biologisch is slechts één ingrediënt in recept voor duurzame voedseltoekomst
- Klimaatverandering verandert de beschikbaarheid van terrestrisch water
- Where Are Bogs Located?
Hoofdlijnen
- Macht overdragen aan staten zal de bescherming van bedreigde diersoorten niet verbeteren
- Computerprogramma detecteert verschillen tussen menselijke cellen
- Uitwerpselen van verstrikte Noord-Atlantische walvissen onthullen torenhoge stressniveaus
- Welke soorten cellen delen door mitose en cytokinese?
- De rol van microben in de industrie
- Een biologische oplossing voor het afvangen en recyclen van koolstof?
- Verschil tussen transcriptie en DNA-replicatie
- Wat zijn chromatine en chromosomen?
- Wat is het verschil tussen een gedupliceerd chromosoom en een chromaat?
- Aanstaande asteroïdemissies kunnen onze oorsprong onthullen, en help de aarde te redden van een dodelijke aanval
- Zoek- en reddingsdienst Galileos in de kijker

- Onderzoekers beschrijven een van de donkerste planeten ooit gevonden (update)
- Eerste bevinding van DAMPE in China kan licht werpen op onderzoek naar donkere materie

- Maine-museum om groot stuk Mars-rots te hosten


 Onderzoekers bereiken een 3D onderwater akoestische tapijtmantel met Black Panther-achtige kenmerken
Onderzoekers bereiken een 3D onderwater akoestische tapijtmantel met Black Panther-achtige kenmerken- Toekomst van zwarte fosfor in 3D-analyse, moleculaire vingerafdrukken
- Hoe het gemiddelde te berekenen in een waarschijnlijkheidsverdeling
- Computermodel voorspelt hoe brekend metaalglas energie vrijgeeft op atomair niveau
- Nano-elektronica-onderzoekers gebruiken Titan voor een opwindende simulatieversnelling
- Gooi uw Eclipse-bril niet weg - geef ze in plaats daarvan een tweede leven
- Tropische cycloon savanne verdwijnt in Suomi NPP satellietbeelden
- Venetië voltooit eerste test van alle stormvloedkeringen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
