Wetenschap
NASA-robottankmissie vertrekt station
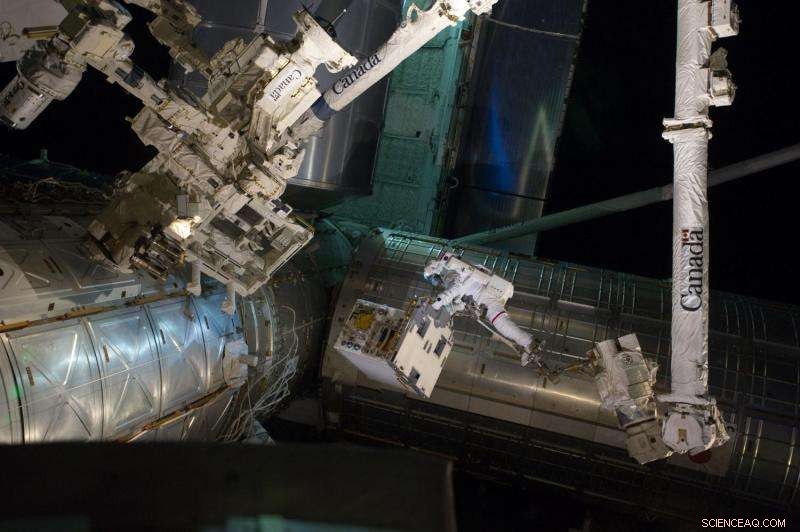
Astronaut Mike Fossum's ruimtewandeling voor de Robotics Refueling Mission Payload op 12 juli 2011. Krediet:NASA
Het internationale ruimtestation dient als een baantest- en demonstratielaboratorium voor wetenschappelijke experimenten die binnen en buiten het ruimtestation kunnen worden uitgevoerd. De experimenten zijn inherent van voorbijgaande aard met typische levenscycli van ongeveer één tot vijf jaar. Zodra hun testdoelen zijn bereikt, ze worden verwijderd om plaats te maken voor nieuwe experimenten.
Op 19 februari, een NASA-experiment - een testmodule genaamd Raven - werd met succes gelanceerd op SpaceX-10 / Dragon en geïnstalleerd aan de buitenkant van het station, waar het stuurautomaattechnologieën voor ruimtevaartuigen zal testen. Terwijl de Raven-lading zijn plaats innam op het station, een andere creatie van de Satellite Servicing Projects Division (SSPD) - de lading van de Robotic Refueling Mission (RRM), vertrokken. Aan boord van de drakenkoffer waarin Raaf arriveerde, RRM keerde op 19 maart terug naar de aarde, waar het weer in de atmosfeer kwam. Hoewel beide payloads van cruciaal belang waren en zijn voor de vooruitgang van satellietdiensten, nadat RRM zijn doel had gediend en zijn doelstellingen had bereikt, het was tijd voor RRM om het station te verlaten en plaats te maken voor nieuwe experimenten.
RRM heeft een stevige erfenis opgebouwd in het demonstreren van satellietservicecapaciteiten en dat on-orbit-service technologisch klaar is voor implementatie. RRM werd in juli 2011 gelanceerd aan boord van de laatste spaceshuttle-vlucht en was de laatste lading die door een astronaut uit het vrachtruim van de shuttle werd verwijderd. Het werd vervolgens buiten gemonteerd op een Express Logistics Carrier gebouwd in het Goddard Space Flight Center van NASA in Greenbelt, Maryland. RRM demonstreerde en testte de tools, technologieën en technieken die nodig zijn voor het robotisch bijtanken en repareren van satellieten in de ruimte die niet zijn ontworpen om te worden onderhouden.
De Robotic Refueling Mission was een essentiële brug tussen het bemande onderhoud dat werd uitgevoerd in de Hubble Servicing Missions en het robotonderhoud dat zal worden gedemonstreerd in de komende Restore-L-missie, " zei Ben Reed, plaatsvervangend divisiedirecteur voor SSPD. "Ons team heeft heel hard gewerkt om de suite van RRM-tools en experimenten te ontwikkelen en is zeer verheugd om te zien wat ze hebben bereikt. We willen de lessen die we van RRM hebben geleerd graag toepassen op de Restore-L-missie en op toekomstige onderhoudsinspanningen."
Het jaar was 2010 toen de planning voor RRM begon. De vierde onderhoudsmissie van de Hubble-ruimtetelescoop was net afgelopen. De spaceshuttle bevond zich in de schemering van zijn carrière, gepland voor pensionering in 2011. De honderden ingenieurs bij Goddard die het onderhoud van Hubble hadden ondersteund, wisten niet zeker wat een toekomst zonder shuttle zou brengen. Een team, geleid door de "vader van het onderhoud" Frank Cepollina, begon te brainstormen hoe we het onderhoud zonder shuttle konden voortzetten. Zonder tijd te verliezen, Het team van Cepollina stelde vast dat de toekomst van onderhoud afhankelijk zou zijn van robotica en de robotarm van het ruimtestation was het beste mechanisme om robotonderhoudstechnieken te testen en te ontwikkelen. Achttien maanden later - extreem snel voor een project van deze complexiteit - bevond RRM zich in het vrachtruim van spaceshuttle Atlantis, klaar om te lanceren en aan de wereld te demonstreren dat robotonderhoud volwassen was geworden.
"Het ruimtestation is in een baan om de aarde en heeft al een robot, " zei Frank Cepollina, de vorige adjunct-directeur van de SSPD. "Het ruimtestation was op maat gemaakt voor RRM en werkte prachtig als testbed voor onderhoud."
De RRM-lading ter grootte van een wasmachine bevatte vier unieke gereedschappen die werden gebruikt door de tweearmige Canadese "Dextre"-robot van het station om de precieze, complexe taken die nodig zijn om een satelliet bij te tanken. Deze taken omvatten het knippen en afpellen van thermische dekens, meerdere doppen losdraaien, toegang krijgen tot kleppen en een gesimuleerde satellietbrandstof overbrengen. In januari 2013 met deze vloeistofoverdracht in de ruimte, RRM bevestigde dat de huidige robottechnologie een drievoudig afgedichte brandstofklep voor satellieten kan bijvullen, het overbrengen van 1,7 liter ethanol.
In afzonderlijke lanceringen in 2013 en 2014, twee nieuwe taakborden en een gereedschap werden naar het ruimtestation gestuurd als onderdeel van RRM "Phase 2". De taakborden demonstreerden verder activiteiten die van vitaal belang zijn voor het onderhoud van vrij vliegende satellieten. evenzo, het nieuwe gereedschap, de Visuele Inspectie Poseable Invertebrate Robot, of VIPIR, state-of-the-art nabije en midrange inspectie tentoongesteld met behulp van een articuleerbare, "slangachtige" borescope-tool.
Door deze twee fasen en meerdere dagen van operaties, het RRM-team heeft een hechte band opgebouwd en heeft consequent onder druk gepresteerd. Samen creëerden ze een nuttige lading en voltooiden ze een missie die cruciaal was voor de toekomst van satellietdiensten. Momenteel, ze ontwikkelen en werken aan de uitvoering van een derde fase van RRM, die de technologie die nodig is voor robottanken verder zal ontwikkelen. RRM 3 zal specifiek gericht zijn op het onderhoud van cryogene vloeistof- en xenongasinterfaces die toekomstige wetenschappelijke missies zullen ondersteunen naarmate mensen hun verkenning verder uitbreiden naar ons zonnestelsel.
"Het ruimtestation was een prachtige faciliteit om onze technologieën te testen, en we weten dat het vertrek van RRM ruimte zal maken voor nog een geweldig experiment, " zei Jill McGuire, Projectmanager RRM. "We zijn trots op wat we bereikt hebben met RRM, en zijn verheugd om bij te dragen aan de volgende fasen van het mogelijk maken van robot-satellietdienstverlening."
 Nieuwe manieren ontwikkelen om de koperproductie te bevorderen
Nieuwe manieren ontwikkelen om de koperproductie te bevorderen- Een fundamentele reactie in de organische chemie op zijn kop zetten - ontdekking van een nieuwe nucleofiele substitutiereactie
- Katalysatorvooruitgang kan leiden tot zuinige brandstofcellen
- Voedingswetenschappers creëren nieuwe magnetische nanodeeltjes voor snelle screening van bestrijdingsmiddelenresiduen in groenten
- Video:Hoe werkt airconditioning?
- NASA ziet een verminderde, maar doordrenkende ex-tropische cycloon Don
- Gevaarlijke chemicaliën worden niet gereguleerd in routinematige olie- en gasactiviteiten
- Hoe het gewicht van een beer te meten vanaf de voetmaat
- Aangename alpiene wolkenformaties leveren geheimen op
- Nitraatstroom in het noordpoolgebied volgt de dalende NOx-emissies in de buurlanden niet
Hoofdlijnen
- Hoe schimmels hebben bijgedragen aan het ontstaan van het leven zoals wij dat kennen
- Aussie uilen vallen door rattengif
- Voor het eerst hebben wetenschappers levende bacteriën rechtstreeks waargenomen in poolijs en sneeuw
- Nieuwe genen op verslechterend Y-chromosoom
- Getoonde chimpansees die spontaan om de beurt een cijferpuzzel oplossen
- Tropische diversiteit wortelt in relaties tussen schimmels en zaden
- Wat gebeurt er als dieren geïsoleerd evolueren?
- Making Better Humans - Het huwelijk van mens en machine
- 10 oudst bekende ziekten




 Onderzoekers creëren een mechanisch afstembare grafeen-kwantumdot
Onderzoekers creëren een mechanisch afstembare grafeen-kwantumdot- Astronomen ontdekken twee heldere quasars met een hoge roodverschuiving
- Het verschil tussen Pluto & Gas Giants
- Amerikanen hebben meer vertrouwen in wetgevende machten waar vrouwen gelijkelijk vertegenwoordigd zijn
- Experts maken intelligente pleister om patiënten te monitoren
- Slim winkelen voor de feestdagen:vermijd neprecensies en lastige advertenties
- Wetenschappers verklaren vorming van maanstofwolken
- Materiaal voor toekomstige elektronica:nieuwe methode maakt grafeen nanoribbons gemakkelijker te produceren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
