Wetenschap
Complex ontwerp van universele controller voor hybride drones automatiseren
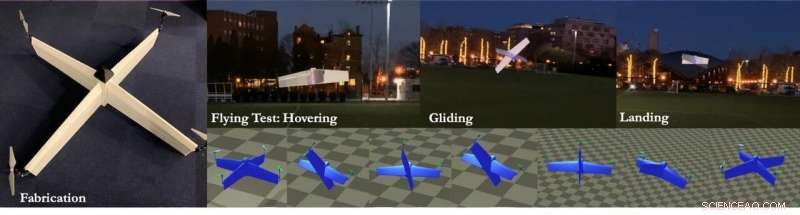
Hybride onbemande luchtvaartuigen, of UAV's, zijn drones die de voordelen van multi-copters en vliegtuigen met vaste vleugels combineren. Deze drones zijn uitgerust om verticaal op te stijgen en te landen als multi-copters, maar hebben ook de sterke aerodynamische prestaties en energiebesparende mogelijkheden van traditionele vliegtuigen. Naarmate hybride UAV's blijven evolueren, echter, ze op afstand bedienen blijft nog steeds een uitdaging. Krediet:Jie Xu
Hybride onbemande luchtvaartuigen, of UAV's, zijn drones die de voordelen van multi-copters en vliegtuigen met vaste vleugels combineren. Deze drones zijn uitgerust om verticaal op te stijgen en te landen als multi-copters, maar hebben ook de sterke aerodynamische prestaties en energiebesparende mogelijkheden van traditionele vliegtuigen. Naarmate hybride UAV's blijven evolueren, echter, ze op afstand bedienen blijft nog steeds een uitdaging.
Een team van het Computer Science and Artificial Intelligence Lab (CSAIL) van het Massachusetts Institute of Technology heeft een nieuwe aanpak bedacht om automatisch een modusvrije, model-agnostisch, AI-gestuurde controller voor elke hybride UAV. Het team zal hun nieuwe computationele controllerontwerp presenteren op SIGGRAPH 2019, gehouden van 28 juli - 1 augustus in Los Angeles. Deze jaarlijkse bijeenkomst toont 's werelds toonaangevende professionals, academici, en creatieve geesten in de voorhoede van computergraphics en interactieve technieken.
Om hybride UAV's te besturen, het ene systeem stuurt de rotors van het helikoptermodel van het voertuig voor het zweven en een ander systeem stuurt de rotors van het vliegtuigmodel voor snelheid en afstand. Inderdaad, het besturen van hybride UAV's is een uitdaging vanwege de complexiteit van de vluchtdynamiek van het voertuig. Typisch, controllers zijn handmatig ontworpen en zijn een tijdrovend proces.
In dit werk, het team ging in op het automatisch ontwerpen van één enkele controller voor de verschillende vliegmodi (coptermodus, glijdende modus, overgang, etc.) en hoe de controller-ontwerpmethode voor elk UAV-model te generaliseren, vorm, of structuur.
"Het ontwerpen van een controller voor zo'n hybride ontwerp vereist een hoog niveau van expertise en is arbeidsintensief, " zegt Jie Xu van MIT en co-auteur van het onderzoek. "Met onze automatische ontwerpmethode voor controllers, elke niet-expert zou hun nieuwe UAV-model in het systeem kunnen invoeren, wacht een paar uur om de controller te berekenen, en vervolgens hun eigen aangepaste UAV's in de lucht te laten vliegen. Dit platform kan hybride UAV's veel toegankelijker maken voor iedereen."
De methode van de onderzoekers bestaat uit een neuraal netwerkgebaseerd controllerontwerp dat is getraind door versterkingsleertechnieken. In hun nieuwe systeem gebruikers ontwerpen eerst de geometrie van een hybride UAV door onderdelen uit een verstrekte dataset te selecteren en te matchen. Het ontwerp wordt vervolgens gebruikt in een realistische simulator om automatisch de vliegprestaties van de UAV te berekenen en te testen. Reinforcement learning-algoritme wordt vervolgens toegepast om automatisch een controller voor de UAV te leren om de beste prestaties in de high-fidelity-simulatie te bereiken. Het team heeft hun methode met succes gevalideerd, zowel in simulatie als in echte vliegtests.
Met de aanhoudende prevalentie van hybride UAV's - in de vliegtuigindustrie en militaire sectoren, er is bijvoorbeeld een groeiende behoefte om het ontwerp van de controller te vereenvoudigen en te automatiseren. In dit werk, de onderzoekers wilden een nieuwe modelonafhankelijke methode leveren om het ontwerp van controllers voor voertuigen met enorm verschillende configuraties te automatiseren.
Bij toekomstig werk, het team is van plan te onderzoeken hoe de manoeuvreerbaarheid kan worden vergroot door een verbeterd geometrieontwerp (vorm, posities van rotors/vleugels) zodat het kan helpen bij het perfectioneren van de vliegprestaties van de UAV.
 Slime maken zonder borax of vloeibare zetmeel
Slime maken zonder borax of vloeibare zetmeel - Groene waterstof:focus op het katalysatoroppervlak
- We hebben een microscoopglaasje gemaakt dat de diagnose van kanker zou kunnen verbeteren door de kleur van kankercellen te onthullen
- Kooldioxide omzetten in butanol met behulp van fosforrijke koperkathoden
- Nieuw biologisch afgeleid metaal-organisch raamwerk bootst DNA na
Hoofdlijnen
- Tagged slakken om onderzoekers te helpen de groei van de slakkenpopulatie te volgen
- Verschrikkelijke sneeuwman? Nee - studie koppelt DNA-monsters van vermeende Yeti's aan Aziatische beren
- Waarom is DNA de blauwdruk van het leven?
- Onderzoek bevestigt het:we worden echt dommer
- Een 3D-model voor celbiologische projecten bouwen Mitochondria en chloroplast
- Hoe succesvol te zijn in Microbiology
- Paradoxen in microbiële economieën
- Bonobo's helpen vreemden ongevraagd
- Het verschil tussen orthologe en paralogische genen
- Lenovo boekt een jaarverlies van $ 189 miljoen bij eenmalige afschrijving

- Problemen omzetten in kansen in stedelijke gebieden

- VK keurt hogesnelheidslijn goed ondanks stijgende kosten

- Duidelijke taal over gezondheidsgegevens is essentieel voor transparantie en vertrouwen

- Duitse autoverkopen kelderen in mei omdat diesel uit de gratie raakt


 Gronddoordringende radartechnologie voor zelfrijdende auto's beperkt weersrisico's
Gronddoordringende radartechnologie voor zelfrijdende auto's beperkt weersrisico's- Onderzoeksteam demonstreert terahertz halfgeleiderlaser met een recordhoog uitgangsvermogen
- Afbeelding:Apollo 7-bemanning traint om technologie te testen voor missies naar de maan
- Wat is primaire rusttijd?
- Nieuw, zeer gedetailleerde details over klimaatverandering voor Duitse provincies
- Onderzoeksteam ontwikkelt ultragevoelige microgolfdetectoren op nanoschaal
- Voordeel en nadeel van kernenergie
- Argentijns Antarctica heeft warmste dag ooit
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
