Wetenschap
Een interpreteerbaar model om de opeenvolgende bewegingen van op elkaar inwerkende agenten te voorspellen
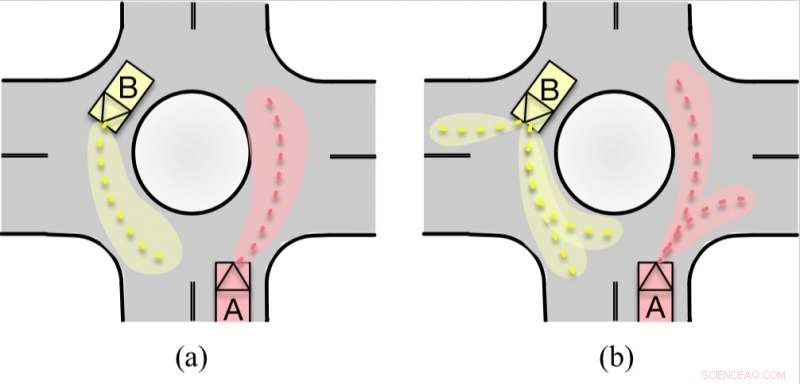
Demonstraties van (a) enkelmodale en (b) multimodale voorspelde distributies. Krediet:Hu, Zhan &Tomizuka.
Onderzoekers van de Universiteit van Californië (UC), Berkeley, hebben onlangs een generatief model ontwikkeld dat de opeenvolgende bewegingen van paren op elkaar inwerkende middelen kan voorspellen, inclusief zelfrijdende voertuigen en voertuigen met menselijke chauffeurs. hun methode, geschetst in een paper dat vooraf is gepubliceerd op arXiv, is interpreteerbaar, wat betekent dat het de logica achter zijn voorspellingen kan verklaren, wat leidt tot een grotere betrouwbaarheid en generaliseerbaarheid.
"Om autonome agenten succesvol te laten opereren in de echte wereld, het vermogen om te anticiperen op toekomstige bewegingen van omringende entiteiten in de scène kan hun veiligheidsniveaus aanzienlijk verbeteren, waardoor ze gevaarlijke situaties op voorhand kunnen vermijden, "Ja hoor, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore.
Eerdere studies hebben opmerkelijke resultaten opgeleverd bij het voorspellen van het gedrag van individuele agenten of voertuigen. Volgens Hu en haar collega's, echter, deze middelen afzonderlijk beschouwen is vaak nutteloos en beperkend, zoals in de echte wereld (bijvoorbeeld op de weg), deze agenten werken typisch met elkaar in wisselwerking en hun toestanden zijn daarom gekoppeld. Bovendien, naarmate de voorspelde horizon zich uitbreidt, het modelleren van voorspellingsonzekerheden en multimodale distributies voor toekomstige sequenties wordt een steeds grotere uitdaging.
"In onze studie we hebben deze uitdaging aangepakt door een multimodale probabilistische voorspellingsbenadering te presenteren, " zei Hu. "De voorgestelde methode is gebaseerd op een generatief model en is in staat om gezamenlijk opeenvolgende bewegingen van elk paar op elkaar inwerkende middelen te voorspellen."
Zoals uitgelegd door Wei Zhan, een andere onderzoeker die bij het onderzoek betrokken was, deze gezamenlijke voorspelling maakt uiteindelijk reactievoorspelling van de bewegingen van andere agenten mogelijk. Het kan een antwoord geven op "wat als"-vragen, zoals "Wat zouden de mogelijke reacties van anderen zijn als het autonome voertuig van de gastheer in de toekomst een specifieke actie onderneemt?" Reactievoorspelling is uiterst belangrijk voor zelfrijdende voertuigen in zeer interactieve rijscenario's.
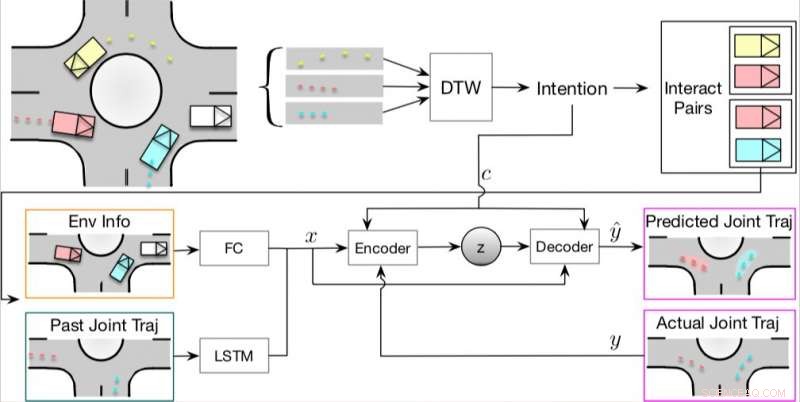
(a) De algemene structuur van de voorgestelde methode. (b) Rotondekaart van alle referentiepaden. Krediet:Hu, Zhan &Tomizuka.
Het model ontwikkeld door Hu en haar collega's is gebaseerd op één belangrijk algoritme, die een vergelijkbare structuur heeft als traditionele Variational Autoencoders (VAE's). In hun studie hebben de onderzoekers gebruikten hun model om het interactieve gedrag tussen twee voertuigen te voorspellen, genaamd A en B.
"Multimodaliteit kan worden gezien in zowel discrete als continue aspecten, Hu legde uit. "Er kunnen veel discrete, intenties op hoog niveau die in de geest van een mens zijn vastgelegd, zoals links/rechts afslaan of een bepaalde rijstrook verlaten in het rotondescenario. Ook, onder elke intentie, er bestaan verschillende continue interacties, zoals verschillende gradaties van pass/yield-gedrag. Daarom, het is noodzakelijk om de multimodaliteit aan te pakken wanneer we het toekomstige gedrag van andere voertuigen voorspellen, wat ons kan leiden tot nauwkeurigere en redelijkere voorspellingsresultaten."
Real-world bewegingsgegevens in zeer interactieve rijscenario's zijn het belangrijkste bezit en de belangrijkste voorwaarde voor onderzoek naar gedrag en bewegingsvoorspelling. De onderzoekers gebruikten een complexe 7-richtingsrotonde met veel verkeer om grote hoeveelheden zeer interactieve bewegingsgegevens te verzamelen.
De gegevens die ze verzamelden, werden gebruikt om het voorgestelde model te trainen en te evalueren, veelbelovende resultaten opleveren. Hun aanpak presteerde beter dan drie alternatieve modellen die vaak worden gebruikt om de beweging van autonome agenten te voorspellen, namelijk voorwaardelijke VAE, multilayer perceptron (MLP) ensemble en Monte Carlo (MC) drop-out. In de toekomst, hun laboratorium zal ook een uitgebreidere bewegingsdataset publiceren.
"In ons recente werk we toonden de onderliggende redenering voor het steekproefproces van de voorspelde resultaten, " zei Hu. "Hoewel er nog een lange weg te gaan is om deze black-box-algoritmen (d.w.z. neurale netwerken) volledig te begrijpen, we hebben geprobeerd om zinvolle informatie te verstrekken over zo'n black-box-algoritme en hebben geprobeerd het voorgestelde algoritme veilig te gebruiken. Als deze voorspellingsalgoritmen ooit in echte autonome voertuigen worden gebruikt, voldoende redenering achter het voorspellingsalgoritme zal zeker nodig zijn."
Het door Hu en haar collega's bedachte model zou kunnen helpen om de veiligheid van autonome voertuigen te verbeteren, waardoor ze interacties tussen andere voertuigen op de weg kunnen voorspellen. In haar volgende studies, Hu is van plan om de veiligheidskant van het voorspellingsalgoritme verder aan te pakken, terwijl ook wordt geprobeerd het voorspellingsproces transparanter te maken.
© 2019 Wetenschap X Netwerk
 Nieuwe methode voor de moleculaire functionalisering van oppervlakken
Nieuwe methode voor de moleculaire functionalisering van oppervlakken- Innovatieve fotokatalytische materialen van koolstofnanobuisjes voor efficiënte omzetting van zonne-energie en waterstofproductie
- Hoe is het periodiek systeem georganiseerd?
- Hoe pKa naar Ka te converteren
- Geavanceerde computers effent de weg naar de toekomst van NMR-spectroscopie
Hoofdlijnen
- Iraakse dierenliefhebbers gaan online om zwerfdieren in Bagdad te redden
- Hoe een 3D-dwarsdoorsnedemodel van de huid te maken
- Bacteriële harpoengeweer van nanoformaat werkt als een boormachine
- Een plantencelmodel maken met een schoenendoos
- Forensische wetenschapsprojecten voor middelbare scholieren
- Hoe virussen de manier veranderen waarop we naar evolutie kijken
- Wat is de brugfase van glycolyse?
- Bepaling van allelfrequenties
- Herintroductie van inheemse zoogdieren helpt dorre landschappen te herstellen
- Inzichten uit Oeganda over waarom straatverlichting op zonne-energie zinvol is

- Bitcoin-prijsmanipulatie brengt het vertrouwen in cryptocurrencies in gevaar

- Instagram onthult nieuwe videoservice als uitdaging voor YouTube

- Cathay zegt dat de meest intense periode van datalek maanden duurde

- Facebook lanceert offensief tegen verkeerde informatie over vaccins


 Onderzoek Topic Ideeën voor Biologie
Onderzoek Topic Ideeën voor Biologie - Geld motiveert bij het verminderen van voedselverspilling, studie vondsten
- Tropische bomen gebruiken unieke methode om droogte te weerstaan
- Het is echt moeilijk voor computers om gezond verstand te leren
- Facebook verwijdert meer accounts die aan Rusland zijn gekoppeld bij nieuw hardhandig optreden
- Wat als we geen mineralen meer hebben?
- 10 soorten fysieke verandering
- Tagging voor metaallegeringen herkent en labelt gedetailleerde microscopische structuren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | French |

-
Wetenschap © https://nl.scienceaq.com
